Distributed multi-robot active gathering for non-uniform agriculture and forestry information
Jun Chen, Mingjia Chen, Jun Wang, Qi Mao, Fei Xie, Philip Dames

TL;DR
This paper introduces a new method for multi-robot systems to efficiently gather information in unevenly clustered agricultural and forestry environments.
Contribution
The novel distributed Bernoulli Thompson Sampling algorithm improves global coordination and task allocation in multi-robot systems.
Findings
The proposed algorithm outperforms baselines in search speed and coverage in clustered target scenarios.
Combining Thompson Sampling with Lloyd’s algorithm and goal swapping enhances task allocation efficiency.
Abstract
Active information gathering is a fundamental task in multi-robot systems in agriculture, with applications in precision planting and sowing, field management and inspection, intelligent weeding and pest control, etc. Traditional distributed strategies often struggle to adapt to environments where information of interest are unevenly clustered, leading to slow detection and inefficient coverage. In this paper, we reformulate the information gathering problem as a multi-armed bandit (MAB) problem and propose a novel distributed Bernoulli Thompson Sampling algorithm. Our approach enables robots to make exploration-exploitation decisions while sharing probabilistic information across the team, thus improving global coordination without centralized control. We further combine the distributed Bernoulli Thompson Sampling policy with Lloyd’s algorithm for dynamic target tracking and introduce…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4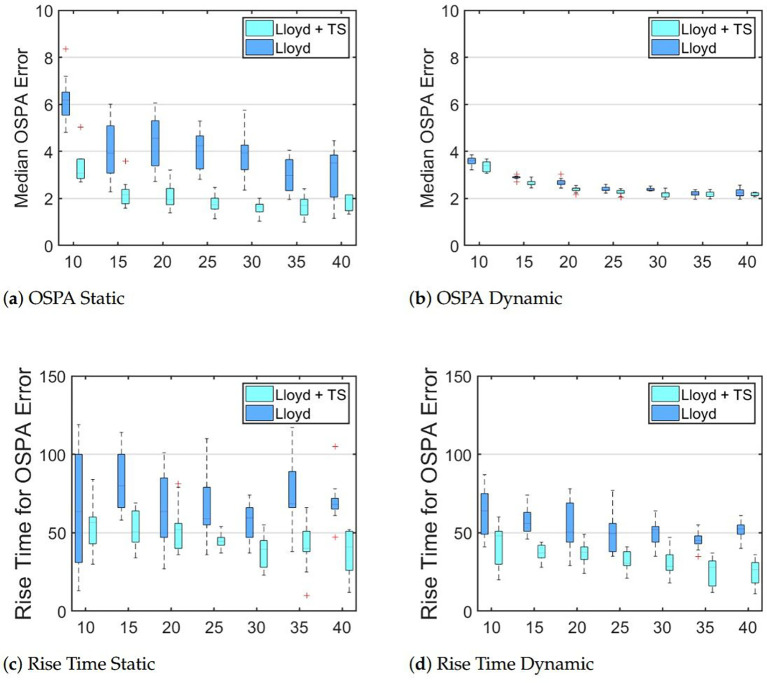 Figure 5
Figure 5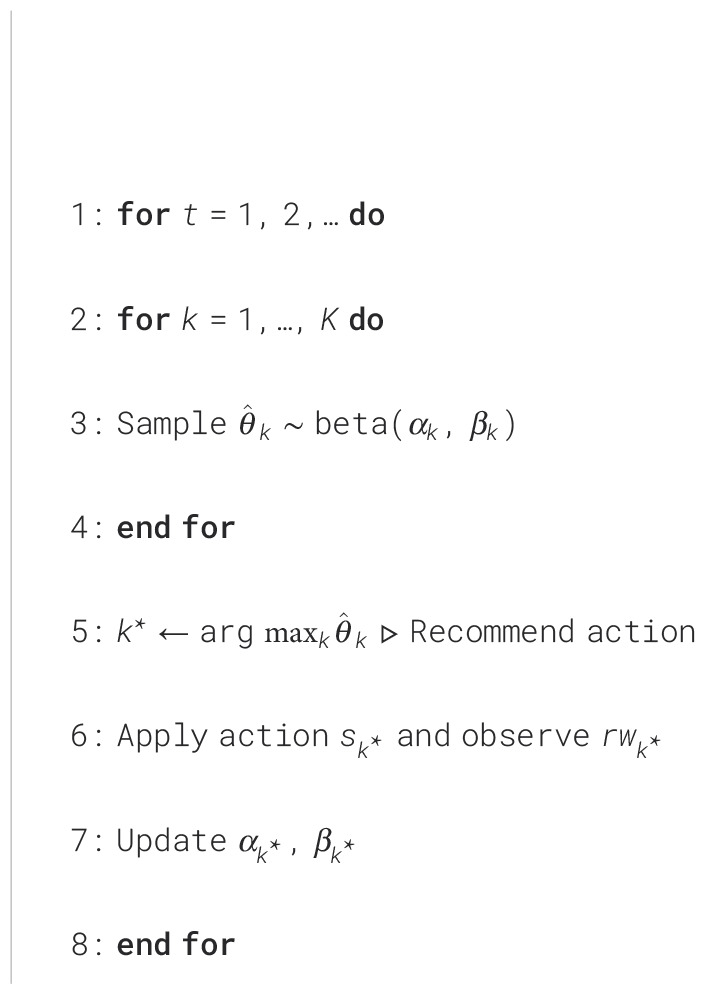 Figure 6
Figure 6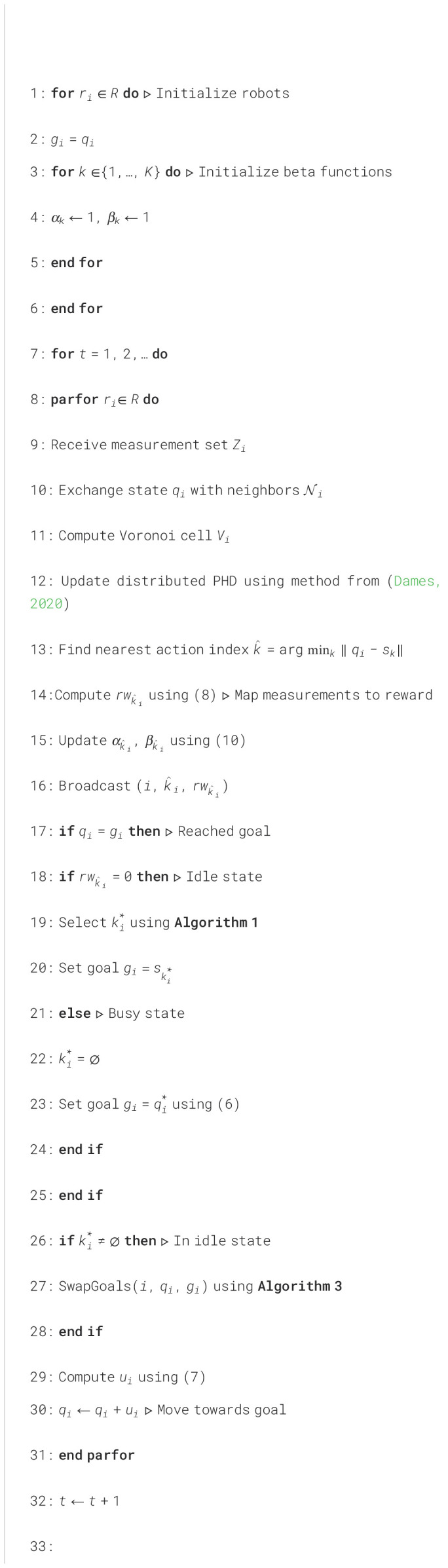 Figure 7
Figure 7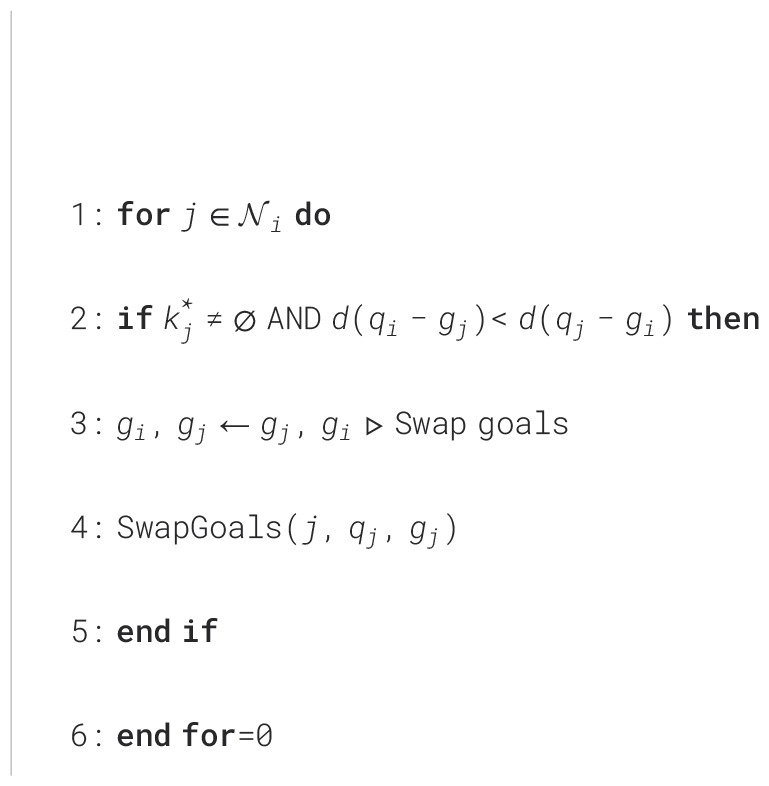 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Optimization and Search Problems · Distributed Control Multi-Agent Systems