Visuo-tactile feedback policies for terminal assembly facilitated by reinforcement learning
Yuchao Li, Ziqi Jin, Jin Liu, Daolin Ma

TL;DR
This paper introduces a reinforcement learning method that uses vision and touch feedback to safely assemble industrial terminals, achieving high success rates.
Contribution
A novel safe reinforcement learning approach using visuo-tactile feedback for robust terminal assembly.
Findings
The proposed method achieved 100% successful insertions in PLC terminal assembly.
The method outperformed imitation learning and online-RL policies significantly.
Decomposing the task into three phases improved robustness to grasp pose variations.
Abstract
Industrial terminal assembly tasks are often repetitive and involve handling components with tight tolerances that are susceptible to damage. Learning an effective terminal assembly policy in real-world is challenging, as collisions between parts and the environment can lead to slippage or part breakage. In this paper, we propose a safe reinforcement learning approach to develop a visuo-tactile assembly policy that is robust to variations in grasp poses. Our method minimizes collisions between the terminal head and terminal base by decomposing the assembly task into three distinct phases. In the first grasp phase,a vision-guided model is trained to pick the terminal head from an initial bin. In the second align phase, a tactile-based grasp pose estimation model is employed to align the terminal head with the terminal base. In the final assembly phase, a visuo-tactile policy is learned…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
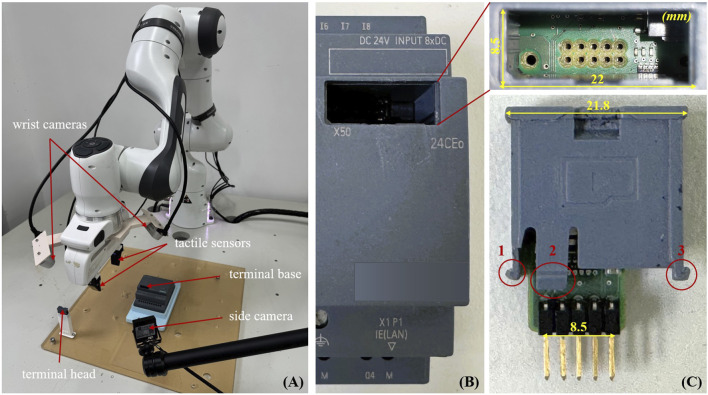 Figure 1
Figure 1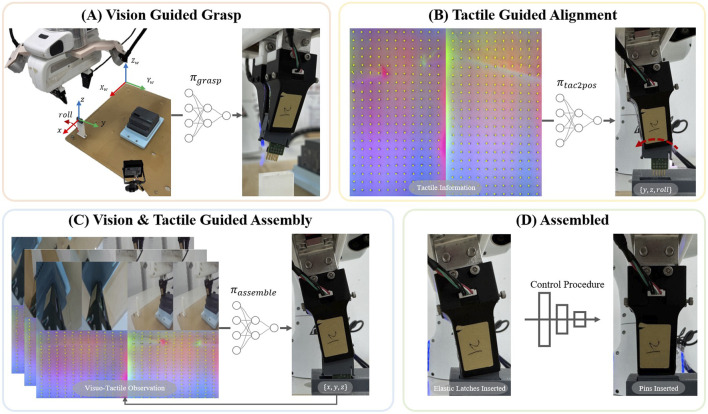 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Tactile and Sensory Interactions · Reinforcement Learning in Robotics