Overground gait transitions are not sharp but involve gradually changing walk–run mixtures even over long distances
Nicholas Baker, Leroy Long III, Manoj Srinivasan

TL;DR
Humans transition between walking and running gradually over a range of speeds during long-distance overground travel, not as a sharp switch.
Contribution
The study reveals that gait transitions during long-distance travel involve gradual walk–run mixtures, governed by energy optimality.
Findings
Gait transitions occur over a broad speed range (1.9 to 3.0 m/s) with mixtures of walking and running.
Walk–run mixtures and their speed dependence are predicted by energy optimality principles.
Similar energetic principles govern both short and long-distance locomotion tasks.
Abstract
Humans typically walk at low speeds and run at higher speeds. Previous studies of transitions between walking and running were mostly on treadmills, but real-world locomotion allows more flexibility. Here, we study overground locomotion over long distances (800 or 2400 m) under time constraints, simulating everyday scenarios like traveling to an appointment. Unlike on treadmills, participants can vary both speed and gait during this task. Gait transition in this overground task occurs over a broad ‘gait transition regime’ spanning average speeds from 1.9 to 3.0 m s−1. In this regime, people use mixtures of walking and running on each travel bout: mostly walking at low average speeds (around 1.9 m s−1) and mostly running at high average speeds (3.0 m s−1). The walk–run fraction changes gradually between these speed limits and is 50% at about 2.5 m s−1. Within each walk–run mixture,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
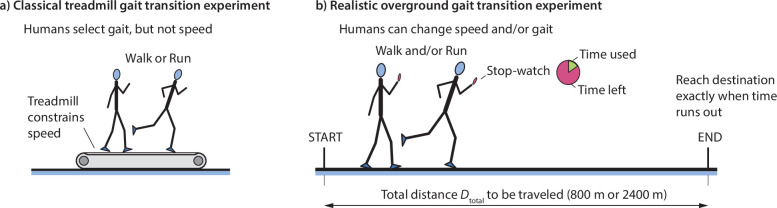 Figure 1
Figure 1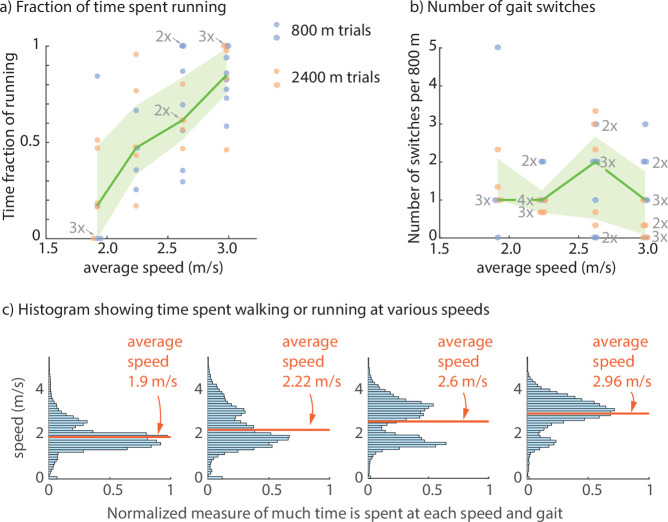 Figure 2
Figure 2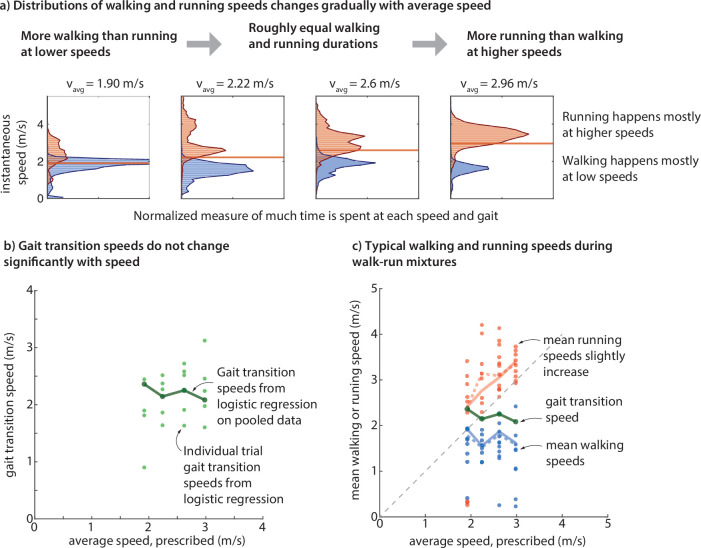 Figure 3
Figure 3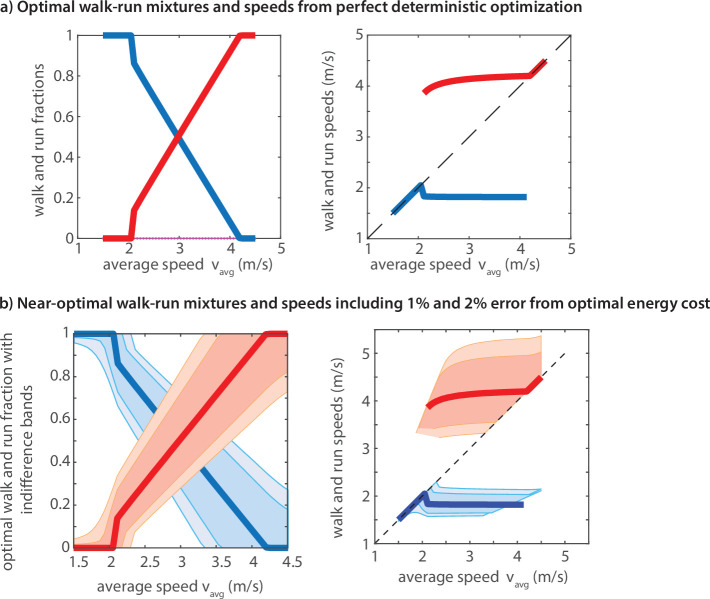 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsBalance, Gait, and Falls Prevention · Robotic Locomotion and Control · Motor Control and Adaptation