Muscle–tendon mechanics resolve the trade-off between energy-efficient and robust locomotion
Matthew Araz, Tobias Siebert, Alexander Badri-Spröwitz, Syn Schmitt, Daniel F. B. Haeufle

TL;DR
This paper shows how muscle-tendon mechanics in animals enable both energy-efficient and stable movement, which could help improve robot design.
Contribution
The study reveals how muscle-tendon systems resolve the trade-off between energy efficiency and robustness in locomotion.
Findings
Muscle–tendon mechanics allow energy-efficient and robust locomotion during perturbed vertical hopping.
Different muscle–tendon length configurations affect locomotion performance in simulations.
Viscoelastic materials inspired by muscle–tendon systems could enhance robot stability and efficiency.
Abstract
Animals utilize elastic tendons in their limbs to store and release energy, reducing muscle effort and overall energy expenditure. At the same time, they navigate rough terrain dynamically without falling, despite significant neural delays. This ability allows them to achieve both robust and energy-efficient locomotion simultaneously—two properties often considered trade-offs in robotics. Through computational simulations, this study demonstrates how muscle–tendon mechanics can facilitate both energy-efficient and robust locomotion during perturbed vertical hopping across different muscle–tendon length configurations. Integrating muscle–tendon-like viscoelastic materials into legged robots may offer a solution to the previously perceived trade-off.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
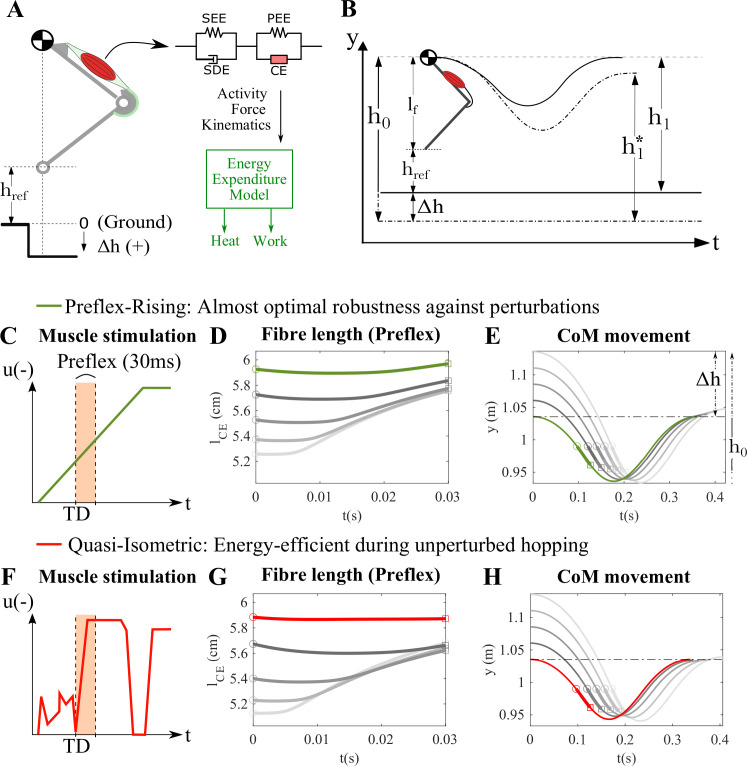 Figure 1
Figure 1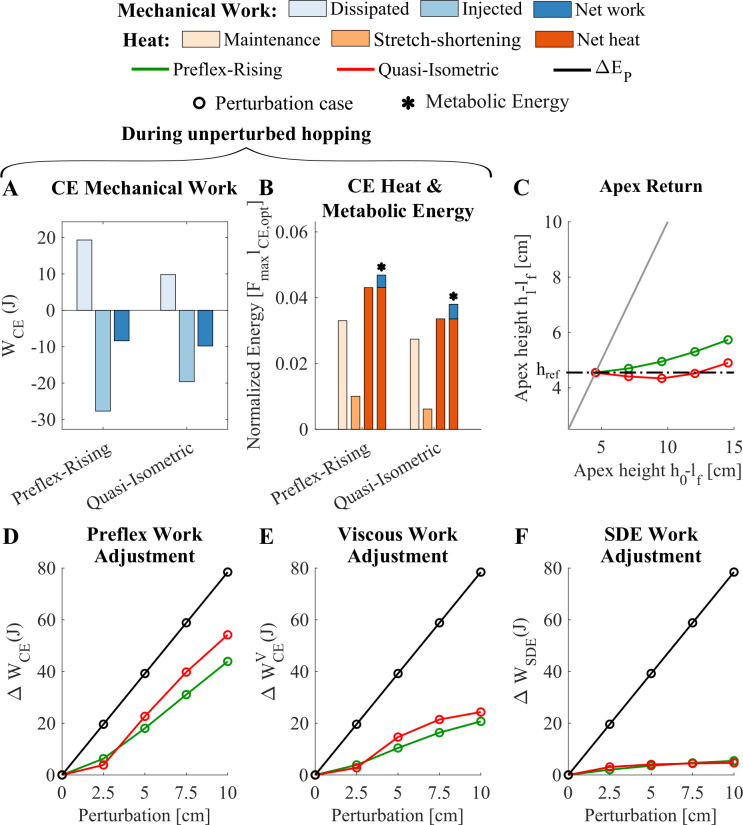 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Muscle activation and electromyography studies · Motor Control and Adaptation