Foot placement control underlies stable locomotion across species
Antoine De Comite, Nidhi Seethapathi

TL;DR
Animals like flies, mice, and humans use foot placement control to maintain stable movement despite errors, with variations based on their body structure and nervous system.
Contribution
The paper introduces a unified feedforward-feedback control structure for stable locomotion across species, supported by empirical data.
Findings
Flies, mice, and humans use error-driven foot placement control to stabilize locomotion.
Multilegged animals show less urgent and slower foot placement corrections compared to humans.
Control signatures in foot placement vary with neuromechanical embodiment across species.
Abstract
Legged animals move from place to place without deviating from their desired movements despite inherent errors. Humans and some robots achieve such stability by placing the swinging foot in a manner that corrects errors. However, we do not understand how such stability is achieved by animals with diverse brains and bodies. Here, we find that other legged animals also move their swinging leg in response to inherent errors. We further find that the inherent mechanical stability of the animal’s body shapes aspects of its control strategy. Our approach to investigate strategies for stable locomotion across species can help advance comparative neuroscience and legged robotics. Animals navigate their environment stably without inefficient course corrections despite unavoidable errors. In humans, this stability is achieved by modulating the placement of the foot on each step such that recent…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
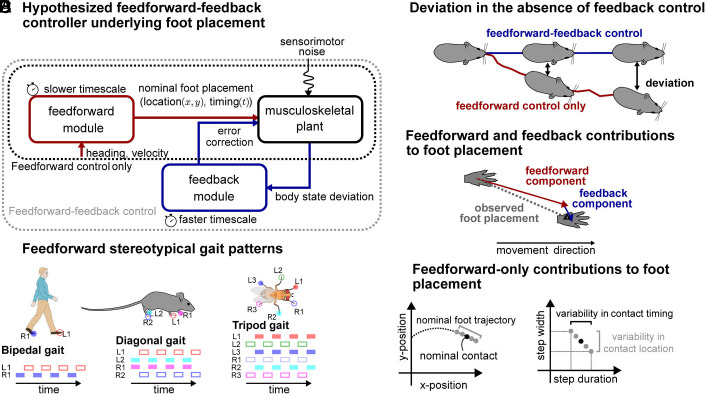 Figure 1
Figure 1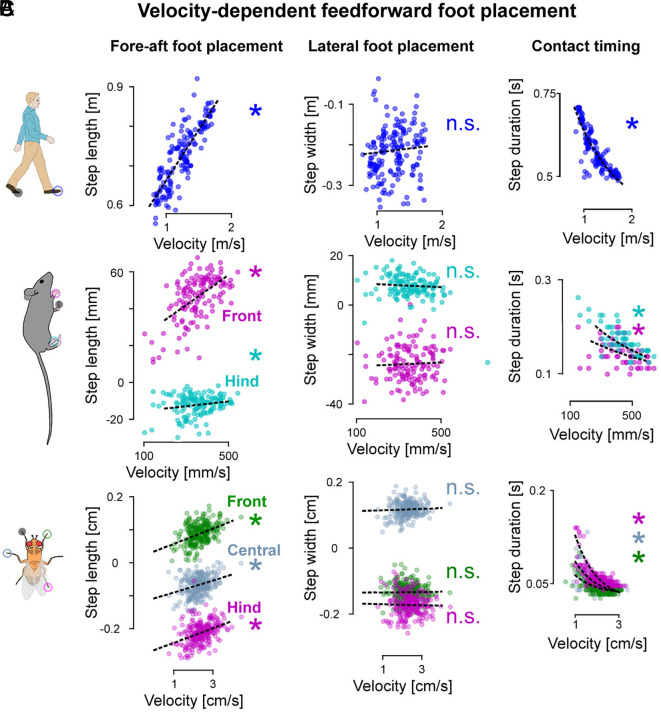 Figure 2
Figure 2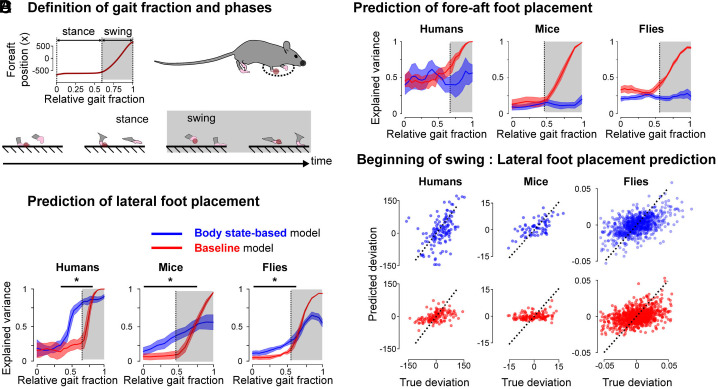 Figure 3
Figure 3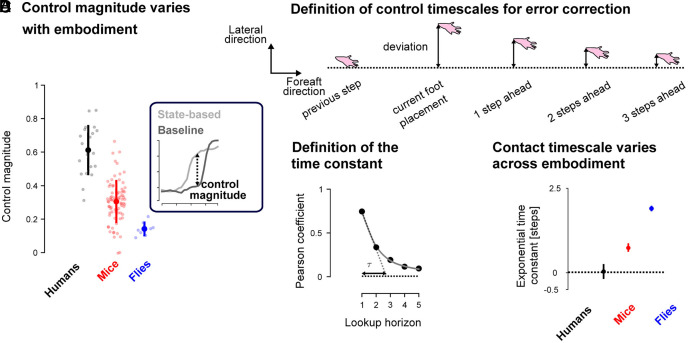 Figure 4
Figure 4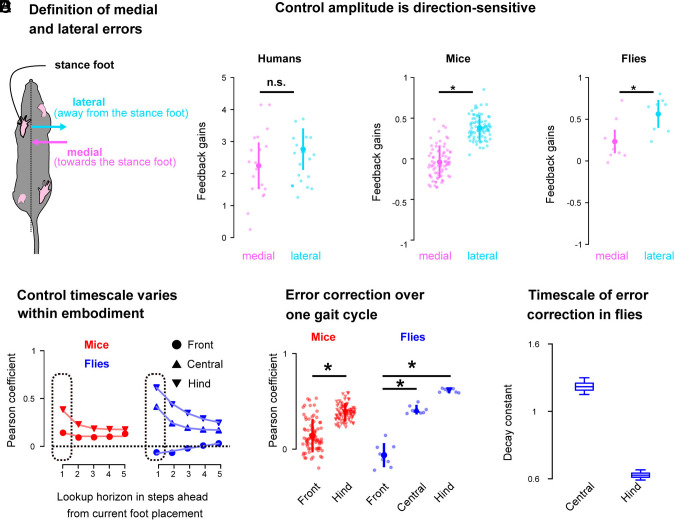 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Biomimetic flight and propulsion mechanisms · Zebrafish Biomedical Research Applications