The First Report of Anatomical Laparoscopic Liver Resection Performed Using ARTISENTIAL
Go Shinke, Yutaka Takeda, Yoshifumi Iwagami, Mitsuru Kinoshita, Yoshiro Yukawa, Asami Arita, Kiminori Yanagisawa, Shinsuke Katsuyama, Masayuki Hiraki, Keijiro Sugimura, Masayoshi Yasui, Kohei Murata

TL;DR
This paper reports the first anatomical liver surgery using the ARTISENTIAL device, which offers improved mobility and cost-effectiveness over robotic systems.
Contribution
The first reported use of the ARTISENTIAL device for anatomical laparoscopic liver resection.
Findings
ARTISENTIAL successfully performed parenchymal transection using the clamp-crushing technique.
The device provided motion benefits similar to robotic systems without the cost or setup requirements.
This case demonstrates ARTISENTIAL's potential to overcome limitations of conventional laparoscopic instruments.
Abstract
Laparoscopic liver resection (LLR) has been widely adopted; however, limited instrument mobility remains a challenge. Such technical limitations can be overcome with the novel articulating laparoscopic device ARTISENTIAL, but its use in LLR has not previously been described. Here we report the first anatomical liver resection performed using the ARTISENTIAL device. A 73‐year‐old man with a segment‐3 hepatic mass underwent laparoscopic left hepatectomy, with lymph node sampling. This procedure was performed using ARTISENTIAL. Parenchymal transection was performed using the clamp‐crushing technique with ARTISENTIAL. The Glissonian stump was closed with sutures. Compared to robotic systems, ARTISENTIAL provides similar motion benefits, without the associated cost or set‐up requirements. ARTISENTIAL is a versatile and cost‐effective technique. This case is the first reported anatomical LLR…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
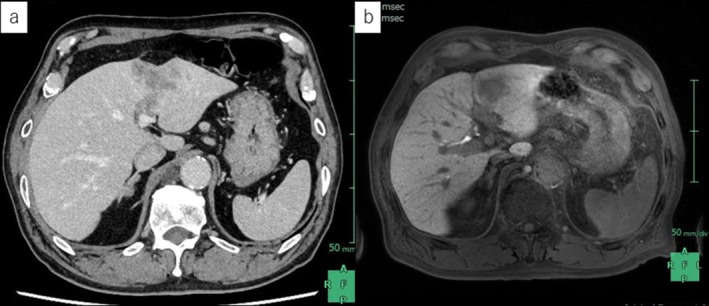 FIGURE 1
FIGURE 1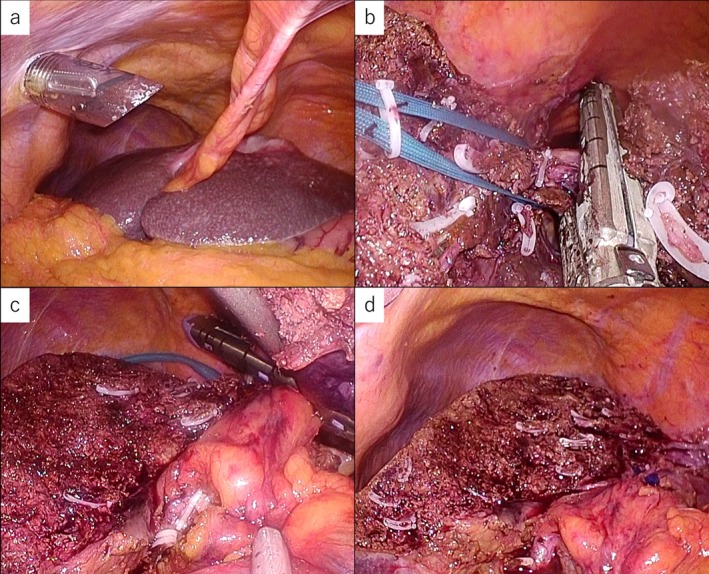 FIGURE 2
FIGURE 2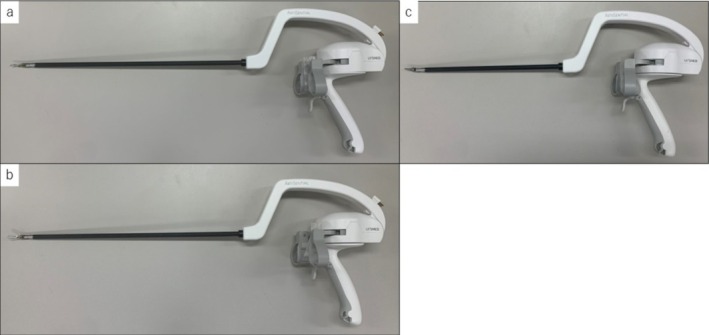 FIGURE 3
FIGURE 3Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsHepatocellular Carcinoma Treatment and Prognosis · Soft Robotics and Applications · Minimally Invasive Surgical Techniques
Introduction
1
Laparoscopic liver resection (LLR) has been increasingly adopted worldwide, with numerous reports highlighting its minimally invasive nature and safety [1, 2]. However, one of the main limitations of LLR is the restricted range of motion of conventional laparoscopic instruments. Although robot liver resection (RLR) has been proposed as a solution to this issue, several challenges remain, including high cost, limited access depending on institutional resources, and the fact that robotic devices are still under development [3].
ARTISENTIAL is a novel instrument designed to overcome the limited maneuverability of instruments in LLR. In 2019, LIVSMED Inc. (Seongnam, South Korea) launched ARTISENTIAL, a disposable, articulating, handheld laparoscopic instrument featuring multi‐degree‐of‐freedom dexterity and 360‐degree wrist‐like articulation at the end effector, similar to what is seen in robotic surgical systems [4]. The multi‐articulated function is achieved by the surgeon's wrist motion: horizontal wrist movement controls the distal end of the instrument tip, while vertical wrist movement controls the proximal end. The clinical application of ARTISENTIAL has been reported in various surgical fields [5, 6, 7, 8]. However, its use in highly invasive procedures such as complex hepatobiliary and pancreatic surgeries remains limited, and no prior reports have described its application in LLR [9]. Therefore, the utility of this device in such procedures remains unclear.
Here, we report the first anatomical liver resection performed using the ARTISENTIAL device and share our initial experience.
Case Presentation
2
A 73‐year‐old man with a 46‐mm segment‐3 hepatic mass underwent laparoscopic left hepatectomy, with lymph node sampling (#8a and #12a) (Figures 1 and 2).
Preoperative imaging shows a 46‐mm tumor in liver Segment 3. (a) Contrast‐enhanced computed tomography. (b) Contrast‐enhanced magnetic resonance imaging.
Intraoperative images. (a) The tumor previously identified in liver segment 3 is clearly visible. (b): The left hepatic vein was divided using a stapling device. (c): The left Glissonian pedicle was divided using a stapling device. (d): The transection surface after liver resection.
We used ARTISENTIAL instruments, specifically the Bipolar Precise Dissector, Bipolar Fenestrated Forceps, and Needle Holder (Figure 3). Parenchymal transection was performed using the clamp crushing technique with ARTISENTIAL. The Glissonian stump was closed with sutures (Video S1).
The complete exterior of the ARTISENTIAL instruments. (a) Bipolar precise dissector. (b) Bipolar fenestrated forceps. (c) Needle holder.
This study was conducted in accordance with the Declaration of Helsinki. This study was performed at Kansai Rosai Hospital and was approved by the local ethics committee (No. 2101014).
The operative time was 434 min. Blood loss was minimal. The patient was discharged on postoperative day 7, without complications. Final pathological evaluation revealed intrahepatic cholangiocarcinoma (pT4N1M0, Stage IVA) (based on the General Rules for the Clinical and Pathological Study of Primary Liver Cancer, 6th edition [revised version], Japan [10]).
Discussion
3
In LLR, limitations in the maneuverability of conventional instruments are often encountered in key surgical steps. Securing the main Glissonian pedicle is a critical step in anatomical LLR, but restricted instrument motion can make this technically challenging. Similarly, during parenchymal transection using the clamp crushing technique, the fixed directionality of instruments may hinder precision. Although suturing during liver transection is relatively uncommon, it can be extremely difficult depending on port placement and the suturing site, given the liver's limited mobility. As a result, metal clips are commonly used instead of sutures to reinforce the Glissonian stump. ARTISENTIAL effectively addressed these limitations, enhancing the surgeon's dexterity and control.
Second, when compared to robotic surgery, cost‐effectiveness is the most significant advantage of ARTISENTIAL. It frees institutions from the financial burden associated with the installation, maintenance, operation, and servicing of robotic systems. Using one ARTISENTIAL instrument in combination with conventional forceps may provide both cost reduction and sufficient benefits of ARTISENTIAL. Moreover, once the surgeon becomes proficient with ARTISENTIAL, it can be selectively used during conventional laparoscopic procedures when motion limitations arise.
Lastly, the use of ARTISENTIAL does require additional training. The operator underwent training using the manufacturer‐provided training kit before clinical use. This is likely due to the fact that ARTISENTIAL integrates the fulcrum mechanics of conventional laparoscopy with the intuitive, wrist‐like articulation commonly seen in robotic surgery—all within a single handheld device. Although we have not analyzed the learning curve in our own experience, previous reports have suggested that proficiency in ARTISENTIAL can be achieved after 19 cases of right hemicolectomy [6]. Accumulating more cases may allow us to further maximize the benefits of ARTISENTIAL.
Conclusion
4
This study represents the first report of an anatomical laparoscopic liver resection performed using ARTISENTIAL. Our experience suggests that this articulating laparoscopic device can effectively overcome the major limitations of conventional instruments in LLR.
Author Contributions
G.S. and Y.T. designed the study, the main conceptual ideas, and the proof outline. Y.I. and M.K. collected the data. Y.Y., A.A., and K.Y. aided in interpreting the results and worked on the manuscript. K.S., M.Y. and K.M. supervised the project. G.S. wrote the manuscript with support from S.K. and Y.T. All authors discussed the results and commented on the manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
Supporting information
Video S1: This video demonstrates a laparoscopic left hepatectomy using ARTISENTIAL, highlighting liver mobilization, parenchymal transection, and suturing of the Glissonean stump.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1K. T. Nguyen , T. C. Gamblin , and D. A. Geller , “World Review of Laparoscopic Liver Resection‐2,804 Patients,” Annals of Surgery 250, no. 5 (2009): 831–841.19801936 10.1097/SLA.0b 013e 3181 b 0c 4df · doi ↗ · pubmed ↗
- 2H. Tranchart , G. Di Giuro , P. Lainas , et al., “Laparoscopic Resection for Hepatocellular Carcinoma: a Matched‐Pair Comparative Study,” Surgical Endoscopy 24, no. 5 (2010): 1170–1176.19915908 10.1007/s 00464-009-0745-3 · doi ↗ · pubmed ↗
- 3J. S. Park , G. S. Choi , S. Y. Park , H. J. Kim , and J. P. Ryuk , “Randomized Clinical Trial of Robot‐Assisted Versus Standard Laparoscopic Right Colectomy,” British Journal of Surgery 99, no. 9 (2012): 1219–1226.22864881 10.1002/bjs.8841 · doi ↗ · pubmed ↗
- 4S. H. Min , Y. S. Cho , K. Park , et al., “Multi‐DOF (Degree of Freedom) Articulating Laparoscopic Instrument Is an Effective Device in Performing Challenging Sutures,” Journal of Minimally Invasive Surgery 22, no. 4 (December 2019): 157–163.35601367 10.7602/jmis.2019.22.4.157PMC 8980149 · doi ↗ · pubmed ↗
- 5J. Trevis , N. Chilvers , K. Freystaetter , and J. Dunning , “Surgeon‐Powered Robotics in Thoracic Surgery; an Era of Surgical Innovation and Its Benefits for the Patient and Beyond,” Frontiers in Surgery 7 (November 2020): 589565.33330607 10.3389/fsurg.2020.589565 PMC 7731580 · doi ↗ · pubmed ↗
- 6S. Kim , J. Lee , H. K. Oh , et al., “Short‐Term Outcomes and the Learning Curve for Laparoscopic Right Hemicolectomy Using the Arti Sential: a Multicenter Pooled Analysis,” Surgical Endoscopy 39, no. 5 (2025): 2931–2937.40111486 10.1007/s 00464-025-11670-z · doi ↗ · pubmed ↗
- 7G. Parente , E. Thomas , S. Cravano , et al., “Arti Sential Articulated Wrist‐Like Instruments and Their First Application in Pediatric Minimally Invasive Surgery: Case Reports and Literature Review of the Most Commonly Available Robot‐Inspired Devices,” Children 8, no. 7 (July 2021): 603.34356582 10.3390/children 8070603 PMC 8306555 · doi ↗ · pubmed ↗
- 8E. Lee , K. Lee , S. H. Kang , et al., “Usefulness of Articulating Laparoscopic Instruments During Laparoscopic Gastrectomy for Gastric Adenocarcinoma,” Journal of Minimally Invasive Surgery 24, no. 1 (March 2021): 35–42.35601278 10.7602/jmis.2021.24.1.35PMC 8966001 · doi ↗ · pubmed ↗