Integrated Control Strategies for a Precision Long-Travel Stage: Applications in Micro-Lens Fabrication
Fu-Cheng Wang, Yan-Teng Chang, Ming-Hsiang Chang, Bo-Xuan Zhong, Tien-Tung Chung, Jia-Yush Yen

TL;DR
This paper presents control strategies for a high-precision stage used in fabricating micro-lenses, combining motor and piezoelectric systems for nanometer accuracy over long distances.
Contribution
The novel integration of control switching, model estimation, gain scheduling, and feedforward mechanisms enables nm-level precision over long travels.
Findings
Control switching and model estimation achieve nm-level precision in the PZT stage.
Gain scheduling and feedforward control enable 0.1 μm resolution over 100 mm in the motor stage.
The integrated system successfully fabricates micro-lenses with verified optical performance.
Abstract
This paper develops multiple control strategies for a precision long-travel stage, which comprises motor and piezoelectric transducer (PZT) stages. First, the PZT stage is equipped with control switching and model estimation mechanisms to achieve nm-level precision within 100 μm distances. The control switching mechanism selects the optimal control sequences by predicting system responses, while the model estimation algorithm updates the system model to improve the prediction accuracy. Second, the motor stage is equipped with gain-scheduling and feedforward control mechanisms to achieve a maximum displacement of 100 mm with a resolution of 0.1 μm. The gain scheduling control modifies the control gain in accordance with tracking errors, while the feedforward control can mitigate phase lags. We integrate the stages to achieve nm-level precision over long travels and conduct simulations…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
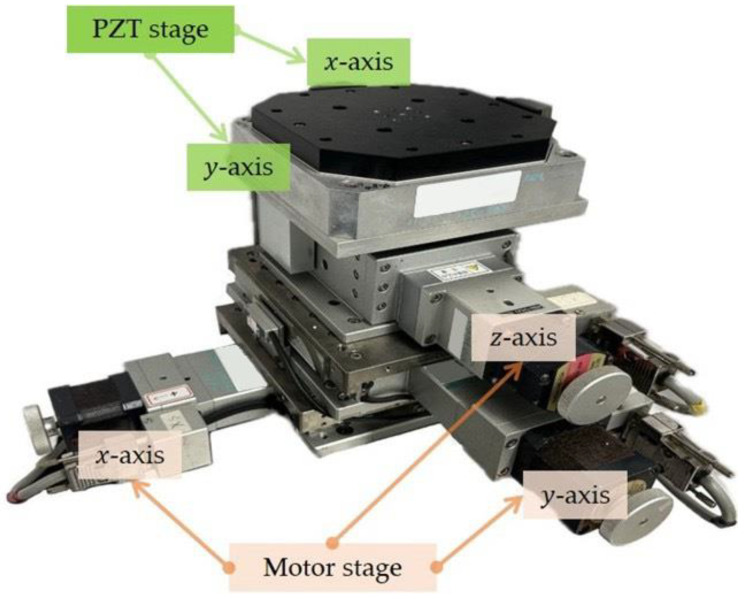 Figure 1
Figure 1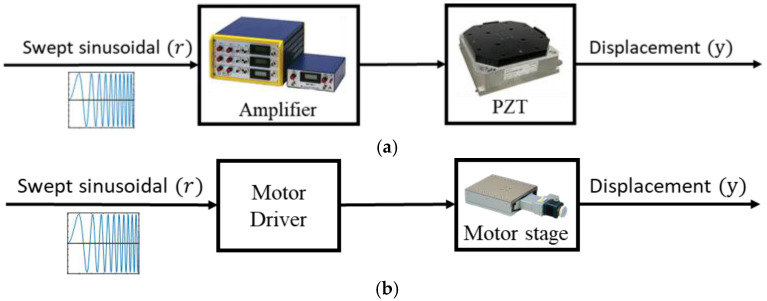 Figure 2
Figure 2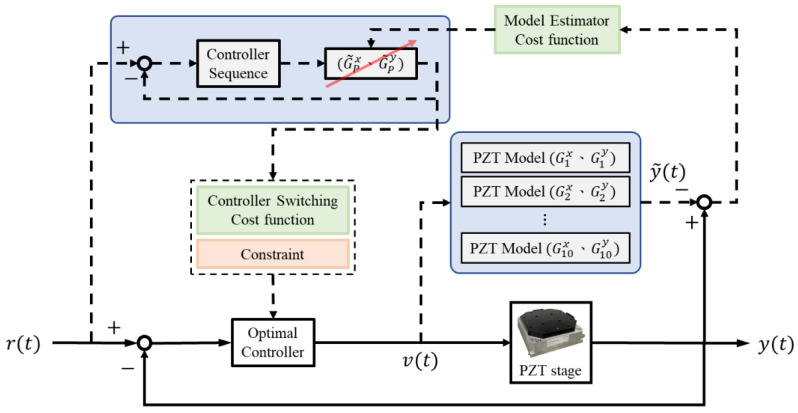 Figure 3
Figure 3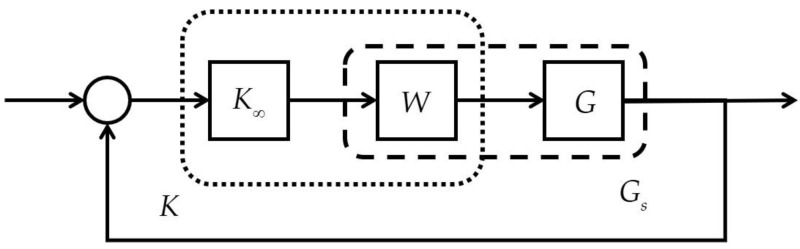 Figure 4
Figure 4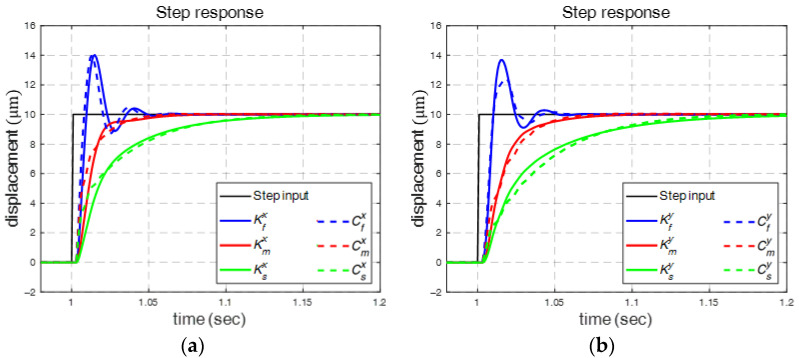 Figure 5
Figure 5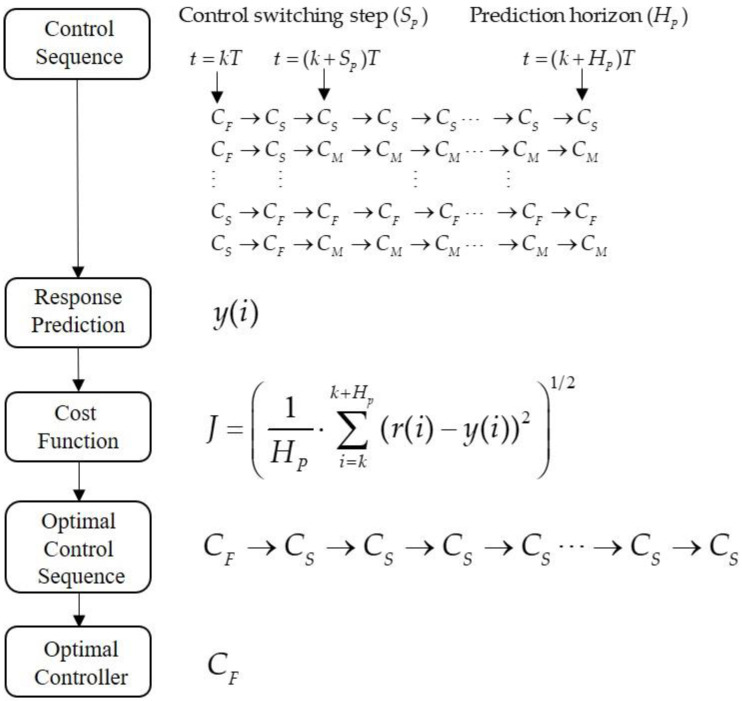 Figure 6
Figure 6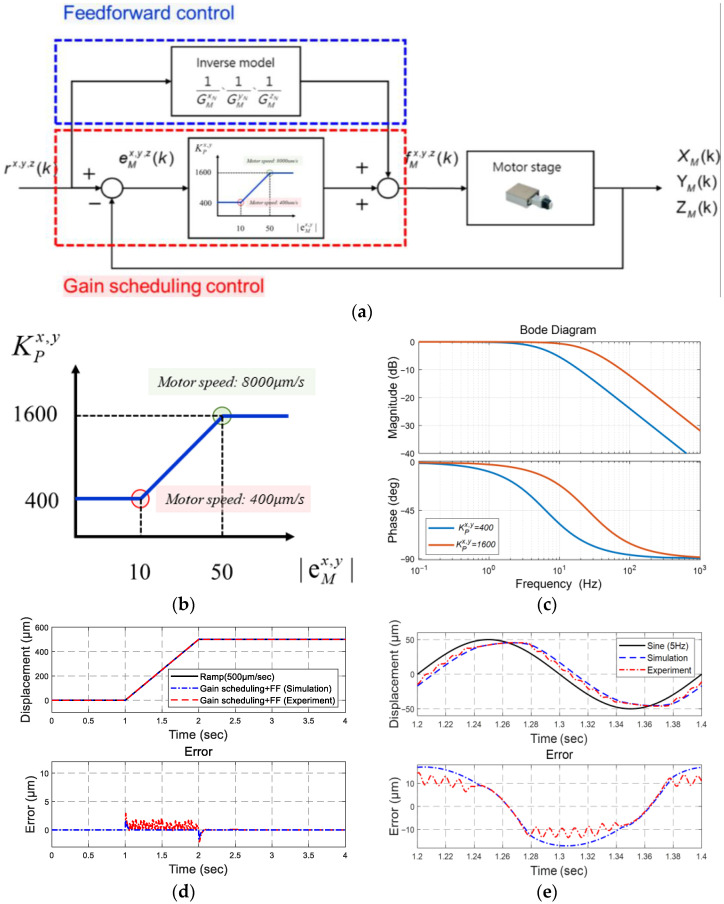 Figure 7
Figure 7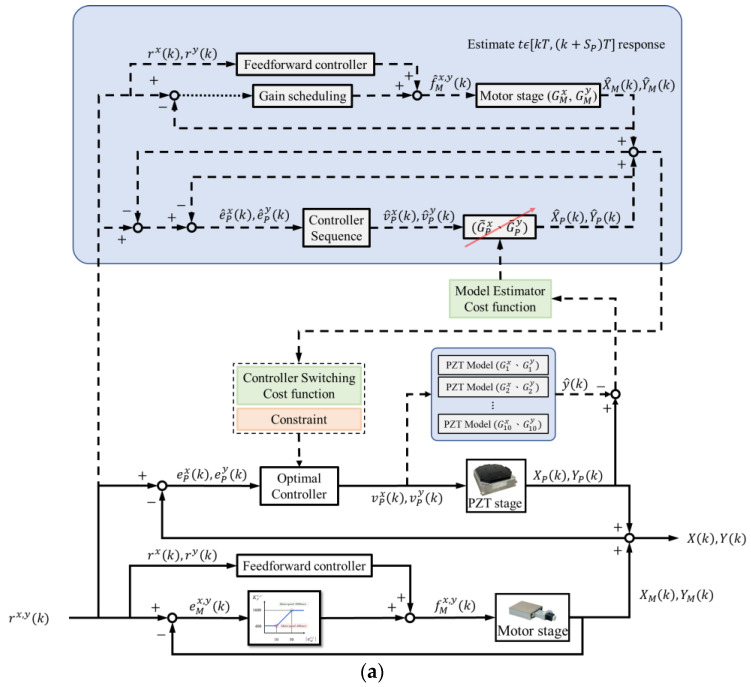 Figure 8
Figure 8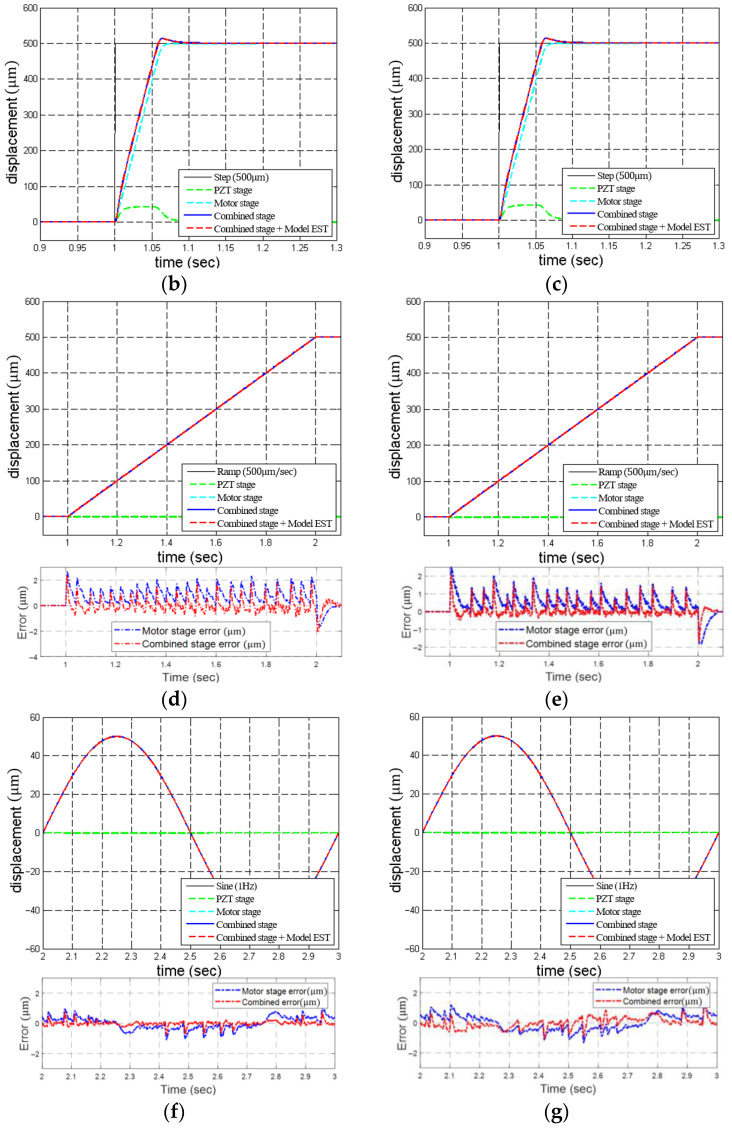 Figure 9
Figure 9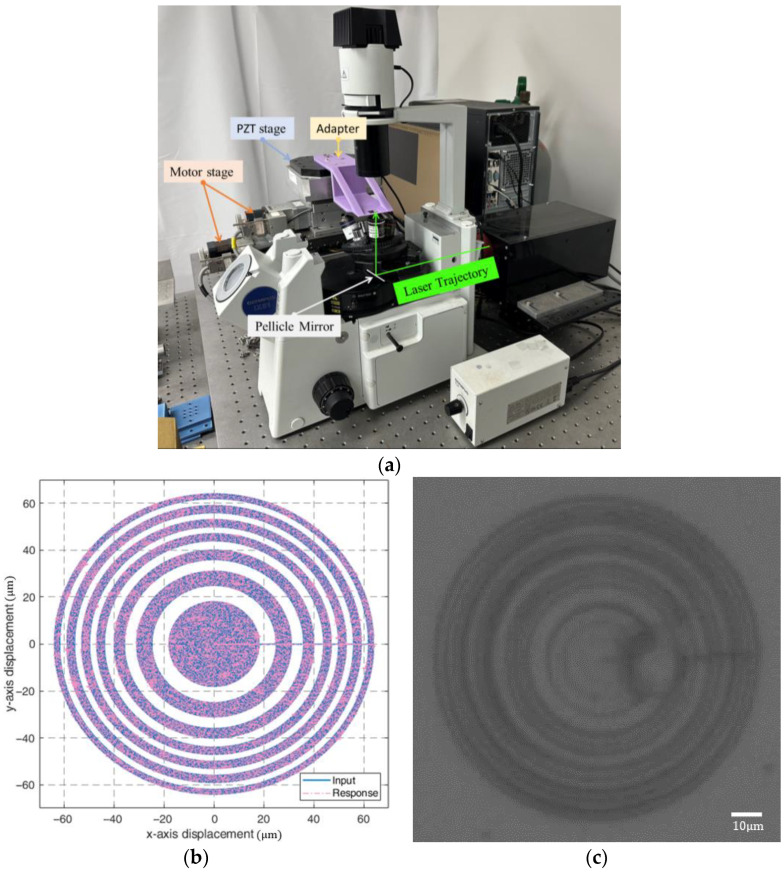 Figure 10
Figure 10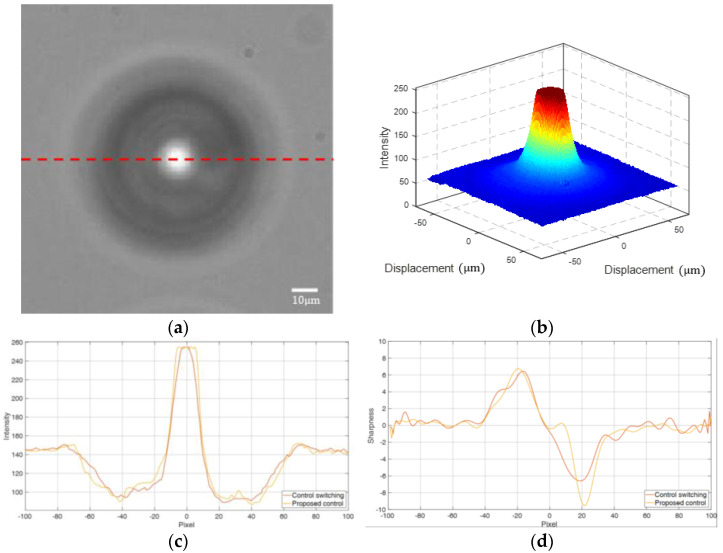 Figure 11
Figure 11- —Ministry of Science and Technology of Taiwan
- —National Science and Technology Council of Taiwan
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced optical system design · Nonlinear Optical Materials Studies · Nanofabrication and Lithography Techniques
1. Introduction
The progression of technological advancements has critically increased the demand for high-precision positioning control. Precision engineering now extensively utilizes piezoelectric materials due to their advantageous properties, including rapid response times and high energy efficiency. Nevertheless, the inherent nonlinearities of these materials can significantly impair positioning accuracy. To address these challenges, researchers have developed various nonlinear modeling techniques and control strategies. For example, Chen et al. [1] proposed a hysteresis modeling approach that captured the nonlinear behaviors of piezoelectric actuators. Baziyad et al. [2] introduced an inverse Preisach model and integrated it with support vector machines to compensate for nonlinearities in piezoelectric-driven positioning systems. Keshavarzpour and Ghasemi [3] implemented a hybrid fuzzy proportional-integral-derivative (PID) control to suppress sound radiation and enhance disturbance rejection. McCartney et al. [4] proposed a compact model for a piezoelectric transistor to simulate nanoscale electromechanical behavior. However, these design approaches have not been entirely successful in eliminating the nonlinearities associated with piezoelectric materials.
Control system design typically involves balancing multiple, and often conflicting, performance criteria. For example, some controllers provide rapid responses but may result in significant overshoots, whereas others provide smoother responses but at the cost of prolonged settling times. To overcome the limitations of fixed controllers, numerous studies have investigated the use of switching control strategies that can provide dynamic adaptation to system conditions. For instance, Kim et al. [5] developed a mode-switching control scheme that integrated optimal servomechanisms and time-delay control to improve positioning accuracy and reduce transition errors in manufacturing equipment. Bashash et al. [6] implemented a switched-control mechanism that transited between two controllers according to position errors to fabricate a piezoelectric transducer (PZT) stage. Li et al. [7] combined trajectory planning and nonlinear feedback to develop a switching mode control for motor systems. Artetxe et al. [8] built a combined control using feedforward neural networks and sliding mode control to suppress hysteresis and improve tracking accuracy. However, these approaches did not address all the issues hindering the control of precision stages.
An integral control method for precision stages, proposed in [9], eliminated steady-state errors and outperformed fixed-gain controllers through adaptive adjustment of the control gain according to position errors. Zhang and Yan [10] proposed an infinite-dimensional H_∞_ control method to address feedback delays caused by high-resolution capacitive sensors in piezoelectric nano-positioning stages, where the experimental results outperformed traditional PID and finite-dimensional controllers. Makarem et al. [11] applied direct data-driven iterative tuning to optimize PID parameters for ultrasonic motors using dual-source and dual-frequency driving techniques. Wang et al. [12] introduced a predictive switching control scheme that could switch between two controllers based on predicted responses to reduce settling time and overshoots. A multiple-switching control framework proposed for PZT stages in [13,14] considered future responses by multiple control sequences to provide better performance than using a single-switching scheme. However, these response predictions were based on a nominal plant and ignored variations in operating conditions. For this reason, further system improvement will require updating the models in the response predictors.
Recent studies have highlighted the importance of accurate response prediction in control systems. For example, Smith et al. [15] presented a data-driven predictive control framework that leveraged past input–output trajectories to improve control performance by predicting future responses. Hiraoka et al. [16] developed a database-driven PID controller that could handle unknown time-delay systems through response prediction. This paper proposes a model estimation mechanism that can estimate the system model in real time and apply it to forecast responses, thereby improving both prediction accuracy and control performance. We can then integrate model estimation and control switching mechanisms and conduct simulations and experiments.
While the PZT stage can achieve nm-level precision, its travel range is limited. To overcome this limitation, we integrated it with a motor stage to provide long-range motion with nanometer-level precision. We then developed gain-scheduling and feedforward control frameworks for the motor stage. The former adjusts control gains based on tracking errors, while the latter compensates for phase lag, thereby improving overall system responsiveness and accuracy. Finally, we integrated the motor and PZT stages and verified the effects of the proposed control strategies through simulations and experiments. Subsequently, the integrated stage was employed to fabricate micro-lenses via two-photon polymerization. We then evaluated the lenses’ optical properties to highlight the merits of the proposed strategies.
The paper is arranged as follows: Section 2 depicts the precision long-travel stage and models. Section 3 introduces control switching and model estimation mechanisms for PZT stages. Section 4 depicts the gain-scheduling and feedforward mechanisms for motor stages. Section 5 integrates the stages and evaluates system performance through simulations and experiments. Section 6 applies the integrated stage to fabricate micro-lenses and evaluate the effectiveness of the control by characterizing the lenses’ optical properties. Finally, Section 7 concludes the study.
2. The Long-Travel Precision Stage
This section depicts the long-travel precision system, which integrates PZT and motor stages (see Figure 1). The former has encoders with resolutions of 1.22 nm and a travel of 100 μm [17]. In contrast, the latter has a 100 mm-travel and 1 μm-resolution [18,19]. An interferometer was applied as a global sensor in [20] to verify the encoder-sensor layouts. The system specifications are available in Appendix A [17,18,19]. By combining these stages, the system can achieve nanometer-level positioning accuracy over centimeter-scale distances. This section also presents the modeling of both stages and the design of their respective control strategies.
2.1. PZT Stage Models
We used experiments to derive the stage models, as shown in Figure 2a, by applying a swept sinusoidal signal as the system input r and measuring the stage displacements y to derive the stage model. An amplifier magnified the driving signals to regulate the stage travels within a range of 0–100 μm.
The identification processes were repeated to derive ten models for the x-axis, as illustrated in Appendix B. A nominal plant was then chosen for control designs in Section 3 based on gap metric principles [21]. Suppose , where and A perturbed plant represents the actual physical system and is different from the mathematical model . The gap between and is labeled as , which is the smallest ε such that with can perturb into [22]. Based on the gap analysis, we selected the following nominal plants for control designs:
Here, minimizes the maximum gaps among all models.
Similarly, we derived ten models for the y-axis of the PZT stage, as illustrated in Appendix B, and selected the following nominal plant for control designs in Section 3:
which minimizes the maximum gaps among all models, with .
2.2. Motor Stage Models
The models of the motor stage were also derived through experiments by applying a signal r as input and measuring the output y (see Figure 2b). Based on gap analyses, the experiments were also repeated to derive ten models on each axis, as illustrated in Appendix B. Based on the gap metrics, the following nominal plants were then selected for control design in Section 4.
3. Control Switching and Model Estimation for the PZT Stage
This section introduces the control switching and model estimation mechanisms for the PZT stage, as illustrated in Figure 3.
3.1. Robust Control Designs
We applied for control designs for precision stages. The system’s internal stability can be maintained by a controller K for all plants with if the stability margin is as follows [23]:
We designed controllers using the loop-shaping technique with a weighted plant , as illustrated in Figure 4. The selection of the weighting function W followed three key principles [24,25]: (1) increasing when is small; (2) decreasing when is large; and (3) letting the slope of around the cross-over frequency. Finally, we implemented the weighted controller to control .
We applied the following weighting functions:
and designed the robust controllers using the MATLAB R2024a command ncfsyn:
denote the fast, medium, and smooth controllers, respectively, for the i-axis, where . These controllers represent different control characteristics, as shown in Figure 5, where produce rapid yet oscillatory responses, while provide smooth but slower responses, and yield a compromise between the rapid and smooth controllers.
We then applied the PSO algorithms [26] to simplify the controllers , as follows:
These controllers were then converted into discrete time for implementation. The system responses are compared in Figure 5, where provide similar responses as but with significantly simpler structures. Therefore, we applied these robust PI controllers to control the PZT stage.
3.2. Multiple-Switching Control
System control usually has multiple control objectives, such as fast responses and limited overshoots, which are difficult to achieve concurrently using a single controller. Therefore, we proposed a multiple-switching control mechanism to determine the most suitable control sequences by predicting system behaviors [14]. The conceptual flow of the integrated switching mechanism is illustrated in Figure 6. The response predictions are based on a controller switching mechanism with three components: (1) the prediction horizon ( ), (2) the switching period ( ), and (3) the cost function.
The response prediction compares the system responses in the future horizon using potential control sequences, as shown in Figure 6, and computes the root mean square error (RMSE)
as the cost function. The optimal control sequence, which achieves the minimum cost, is then selected. The corresponding controller is then applied to control the stage.
3.3. Model Estimation
Considering the model variation in the response predictor, we developed a model estimation mechanism that can update the stage model, and , in real time, based on the model input v and output y when predicting the responses. The model was selected to minimize the estimation errors, as follows:
where represents the measured output and is the estimated output when using .
We further integrated the model estimation and multiple-switching control mechanisms to decide on the optimal control sequences in real time. Because the models are updated according to the model input and output , we updated the corresponding controllers as follows:
to maintain the same loop transfer functions. The modified controllers are summarized in Appendix C.
Implementing the control mechanisms, we conducted experiments with a step input of 10 μm. Table 1 shows the comparison of system performance, including the overshoot, RMSE, settling time, and rise time, to highlight the effects of the proposed mechanisms. Although the rise time shows a slight regression, its influence on overall performance does not pose a substantial issue and can be neglected.
4. Gain Scheduling and Feedforward for the Motor Stage
We designed gain scheduling and feedforward mechanisms [13] for the motor stage (see Figure 7a). Because these are first-order models, a constant control can arbitrarily assign closed-loop poles. In addition, feedforward can enhance closed-loop responses by mitigating phase lags.
4.1. Gain Scheduling
We can adjust the controller gain accordingly to tracking errors , as follows (see Figure 7b):
We set the maximum gain as 1600 because the maximum motor speed is 80,000 pulse/s, so the motor can reduce the tracking errors at the maximum speed when they are larger than 50 μm. The minimum gain was set to 400 when the tracking errors are less than 10 μm, allowing the PZT stage to compensate for the tracking errors of the combined stage smoothly.
The system’s Bode plots, illustrated in Figure 7c, show significant phase lags in the middle frequency range. Therefore, a feedforward mechanism was developed to reduce the phase lag.
4.2. Feedforward Compensation
A feedforward control can compensate for a phase lag by employing inverse motor-stage models. Since the inverse models are inherently improper, we designed the feedforward controllers by adding one additional pole, as follows:
For example, given a ramp input of 500 μm/s and a sinusoidal input of 5 Hz, the tracking results shown in Figure 7d,e, and Table 2 illustrate the effects of the feedforward and gain scheduling control.
5. Integration of the Long-Travel Precision Stage
The PZT and motor stages were integrated, as illustrated in Figure 8a. For the PZT stage, the model estimator selects the optimal model and updates the corresponding controllers, while the response predictor forecasts the system responses and chooses the best control sequences. For the motor stage, the control gains were modified according to the tracking errors, while the feedforward control compensated for the phase lags.
Because the PZT had limited travel, the following function was implemented to prevent saturation:
where and denote the tracking errors of the integrated stage. The motor stage was applied for large-range positioning. Once the overall tracking error was less than 50 μm, the PZT stage could then achieve precision positioning by compensating for the errors .
We implemented control mechanisms and conducted experiments with the following inputs: 500 μm step, 500 μm/s ramp, and 1 Hz sinusoidal signals. The responses are shown in Figure 8 and Table 3. Compared to the motor stage alone, the integrated stage with the model estimation and control switching mechanisms significantly reduced the overshoot and maximum errors. Moreover, a notable reduction in RMSE was also achieved. For example, compared with the multiple-switching control developed in [13], the proposed multiple control mechanisms improve the RMSE from 150.2 μm to 73.40 μm in the 500 μm step responses. Although the motor stage was equipped with a feedforward controller, noticeable tracking errors occurred during high-speed sinusoidal motion when using the motor stage alone. By incorporating the PZT stage for real-time error compensation, the integrated system was able to reduce tracking errors further. For instance, the PZT stages improved the tracking errors from 41% to 95%.
6. Micro-Lens Fabrication
This section applies the combined stage to manufacture micro-lenses using a TPP system, which applies two-photon absorption (TPA) techniques and has been widely applied in micro-nano photonics [27,28] and micro-electromechanical systems [29,30]. The TPP system was integrated with the long-travel precision stage, as illustrated in Figure 9a, to fabricate micro-lenses. The mirror reflected the laser to focus into the resin on a microscope slide on the adapter attached to the PZT stage to manufacture micro-lenses by hardening the resin. The specially formulated resin is a blend of OrmoComp and photo-initiator for polymerization.
We fabricated a Fresnel Zone Plate (FZP), which focuses light using a planar micro-lens, with a diameter of 106 μm, with the following [14]:
as shown in Figure 9b, where is the radius of circle n, f is the focal length, while is the wavelength. We set the number of zones as n = 9, f = 500 μm, and . The fabricated micro-lens is shown in Figure 9c.
We used each micro-lens to focus light on the focal plane of a camera and assessed its optical quality based on the image intensity and sharpness, as illustrated in Figure 10a. Each captured image was converted to grayscale, where the brightness of each pixel was labeled between 0 and 255, where 0 represents completely black and 255 represents completely white, as shown in Figure 10b. The brightness on the dashed line is shown in Figure 10c, where intensity is defined as the corresponding grayscale value on each pixel, while sharpness is the derivative of the intensity (see Figure 10d).
The stage’s tracking errors and the micro-lenses’ optical properties are illustrated in Table 4. Compared with the micro-lenses fabricated in [31], which had a maximum intensity of 160, the multiple-switching mechanism in [14] improved the maximum intensity to 255 with a maximum sharpness of 6.6. In addition, the proposed multiple control mechanisms slightly reduced the RMSE from 94.2 nm to 92.5 nm and significantly increased the maximum sharpness to 9.5. These results confirm the merits of the multiple control mechanisms for enhancing the microfabrication precision.
7. Conclusions
In this study, we developed multiple control mechanisms for a precision long-travel stage consisting of a PZT and motor stages. The former used the control switching and model estimation mechanisms, while the latter utilized the gain scheduling and feedforward controls. Ultimately, the integrated stage enabled long travel with precision positioning. We implemented this multiple control strategy in a combined stage and demonstrated its effectiveness in enhancing precision positioning in simulations and experiments. Finally, we applied the long-travel precision stage to fabricate micro-lenses using TPP and demonstrated the advantages of the control mechanisms in microfabrication processes by evaluating the lenses’ optical characteristics.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Chen J. Peng G. Hu H. Ning J. Dynamic hysteresis model and control methodology for force output using piezoelectric actuator driving IEEE Access 2020820513620514710.1109/ACCESS.2020.3037216 · doi ↗
- 2Baziyad A.G. Ahmad I. Salamah Y.B. Precision motion control of a piezoelectric actuator via a modified Preisach hysteresis model and two-degree-of-freedom H-Infinity robust control Micromachines 202314120810.3390/mi 1406120837374793 PMC 10305727 · doi ↗ · pubmed ↗
- 3Keshavarzpour H. Ghasemi A. Hybrid fuzzy PID sound radiation control of a functionally graded porous GPL-reinforced plate with piezoelectric sensor and actuator layers Appl. Math. Modell 202412765567810.1016/j.apm.2023.12.004 · doi ↗
- 4Mc Cartney L.N. Crocker L.E. Wright L. Rungger I. A Compact Device Model for a Piezoelectric Nano-Transistor Micromachines 20251611410.3390/mi 1602011440047562 PMC 11857766 · doi ↗ · pubmed ↗
- 5Kim J.J. Choi Y.M. Gweon D.G. A novel mode switching control for fast settling and high precision positioning Proceedings of the 2007 International Conference on Control, Automation and Systems Seoul, Republic of Korea 17–20 October 200710.1109/ICCAS.2007.4406599 · doi ↗
- 6Bashash S. Saeidpourazar R. Jalili N. Tracking control of time-varying discontinuous trajectories with application to probe-based imaging and nanopositioning Proceedings of the 2009 American Control Conference St. Louis, MO, USA 10–12 June 200910.1109/ACC.2009.5160114 · doi ↗
- 7Li S. Xu Y. Zhang W. Zou J. A novel two-phase mode switching control strategy for PMSM position servo systems with fast-response and high-precision IEEE Trans. Power Electron.20223880381510.1109/TPEL.2022.3200969 · doi ↗
- 8Artetxe E. Barambones O. Calvo I. Del Rio A. Uralde J. Combined control for a piezoelectric actuator using a feed-forward neural network and feedback integral fast terminal sliding mode control Micromachines 20241575710.3390/mi 1506075738930727 PMC 11205561 · doi ↗ · pubmed ↗