A Dual-Mechanism Enhanced Secretary Bird Optimization Algorithm and Its Application in Engineering Optimization
Changzu Chen, Li Cao, Binhe Chen, Yaodan Chen, Xinxue Wu

TL;DR
This paper introduces an improved optimization algorithm that performs better on complex engineering problems.
Contribution
A new optimization algorithm, ORSBOA, is proposed with dual mechanisms for better exploration and exploitation.
Findings
ORSBOA outperforms nine state-of-the-art algorithms in convergence and solution quality.
Statistical analysis confirms the robustness and effectiveness of ORSBOA on benchmark and engineering problems.
Abstract
The secretary bird optimization algorithm is a recently developed swarm intelligence method with potential for solving nonlinear and complex optimization problems. However, its performance is constrained by limited global exploration and insufficient local exploitation. To address these issues, an enhanced variant, ORSBOA, is proposed by integrating an optimal neighborhood perturbation mechanism with a reverse learning strategy. The algorithm is evaluated on the CEC2019 and CEC2022 benchmark suites as well as four classical engineering design problems. Experimental results demonstrate that ORSBOA achieves faster convergence, stronger robustness, and higher solution quality than nine state-of-the-art algorithms. Statistical analyses further confirm the significance of these improvements, validating the effectiveness and applicability of ORSBOA in solving complex optimization tasks.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
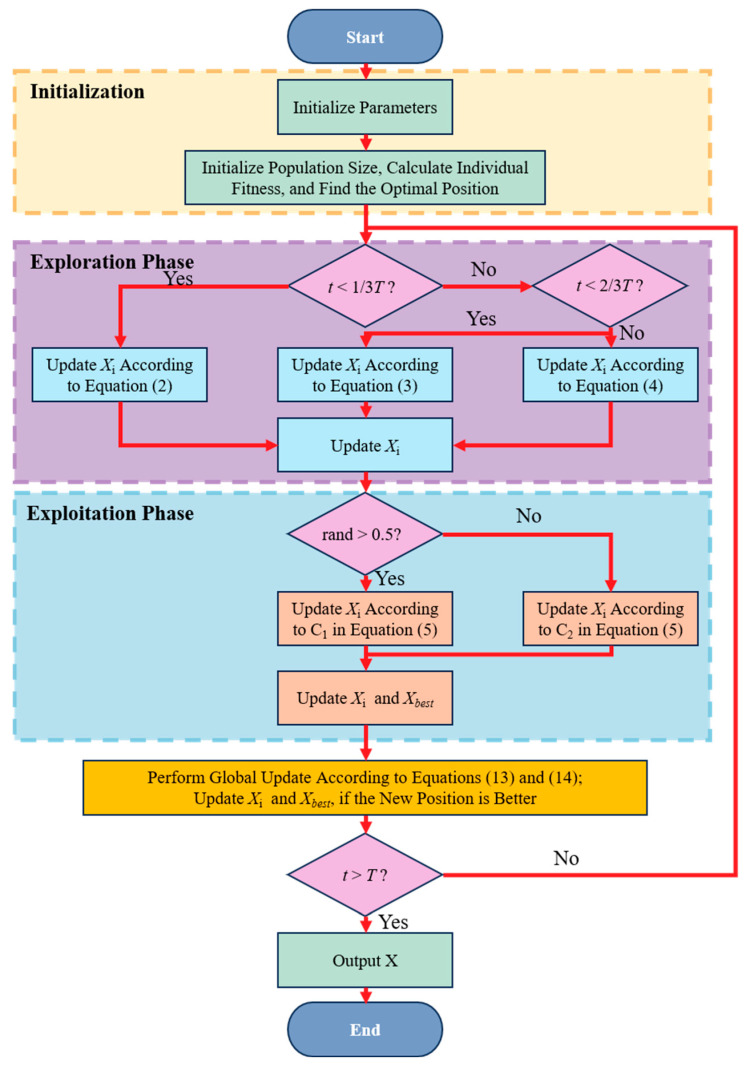 Figure 1
Figure 1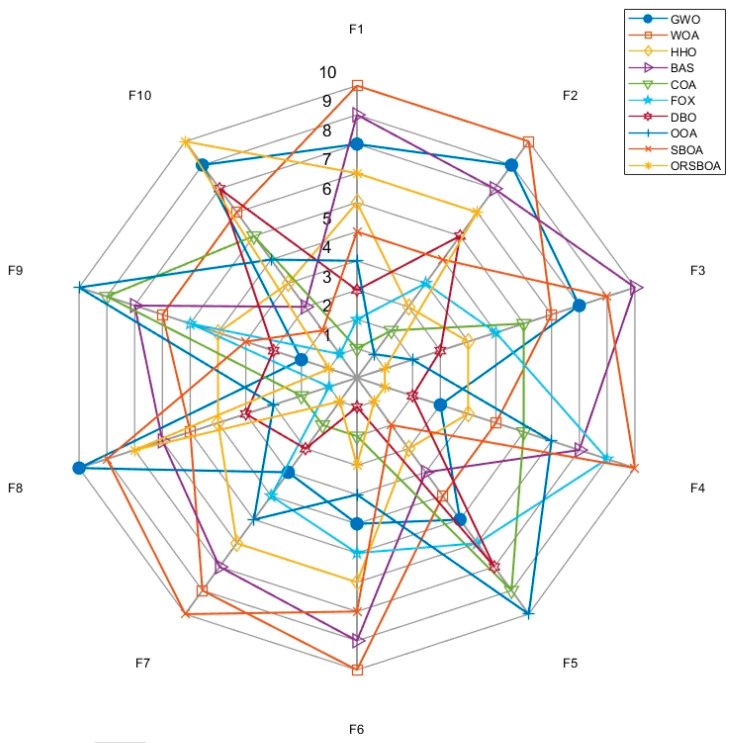 Figure 2
Figure 2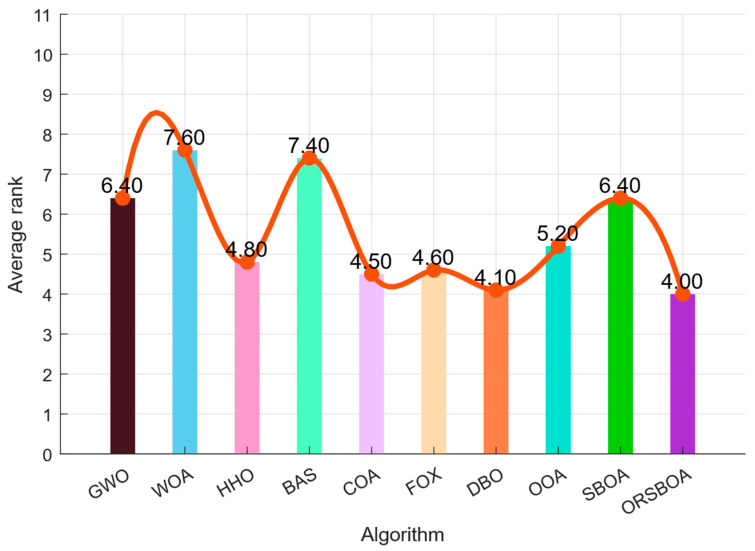 Figure 3
Figure 3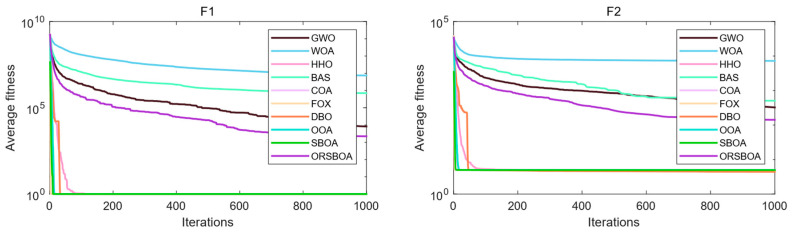 Figure 4
Figure 4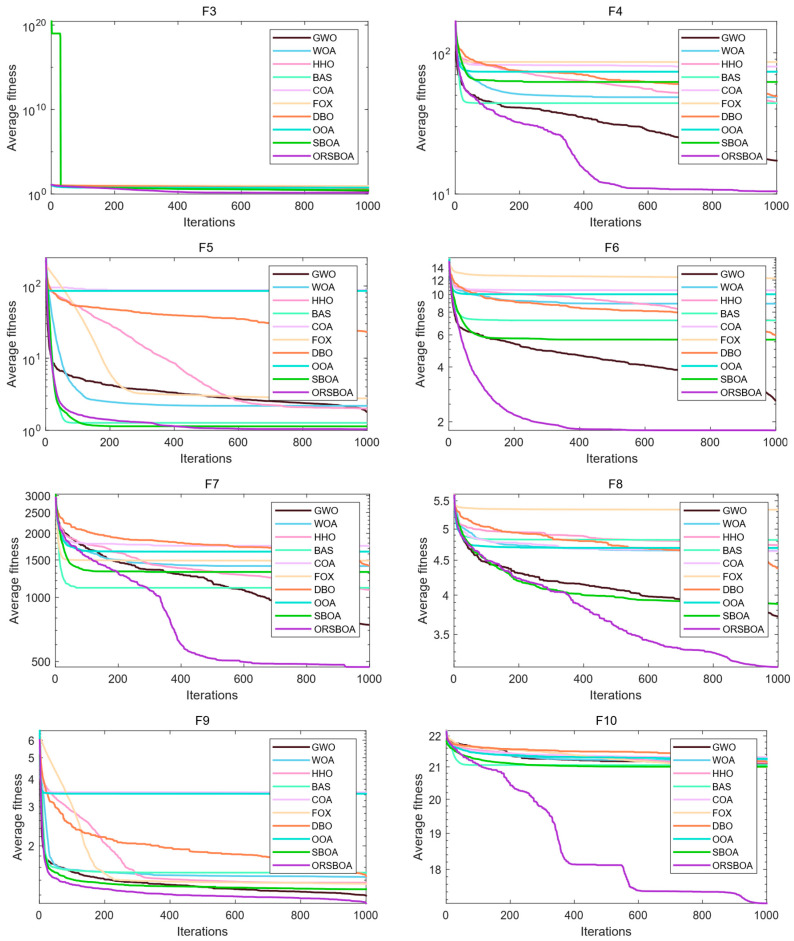 Figure 5
Figure 5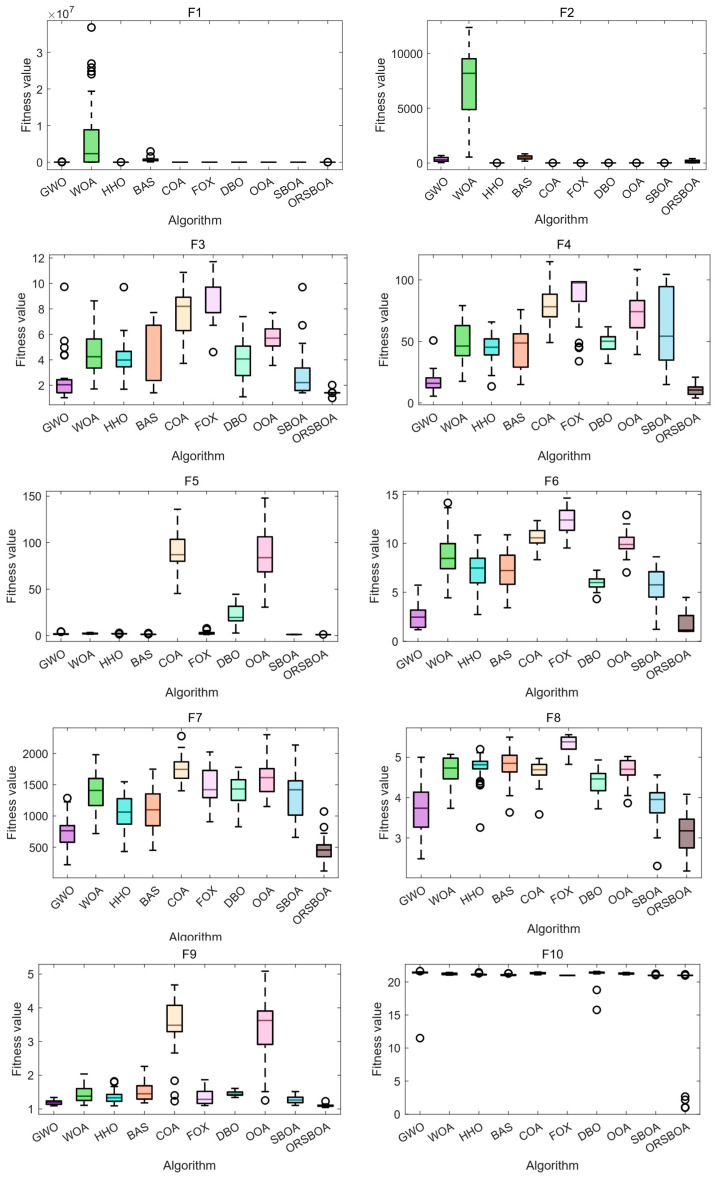 Figure 6
Figure 6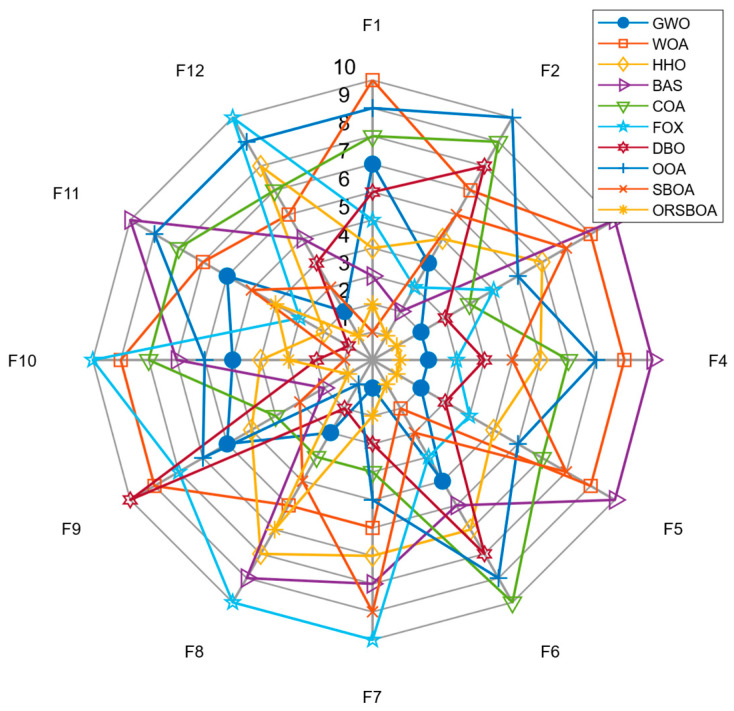 Figure 7
Figure 7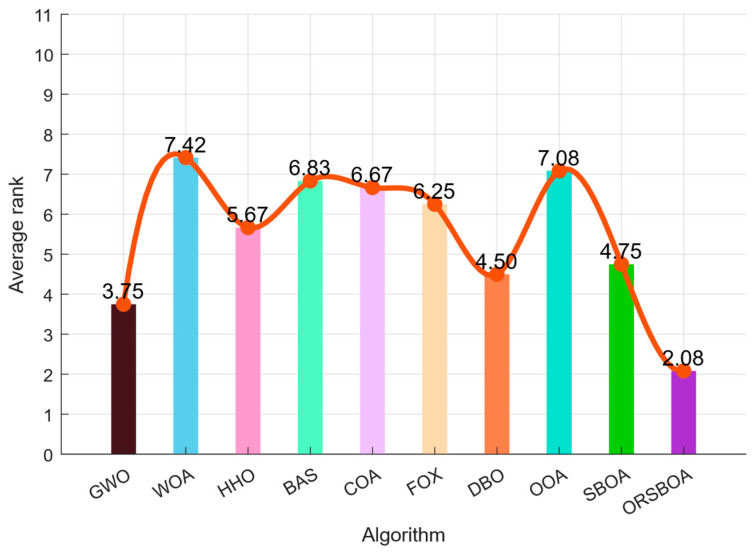 Figure 8
Figure 8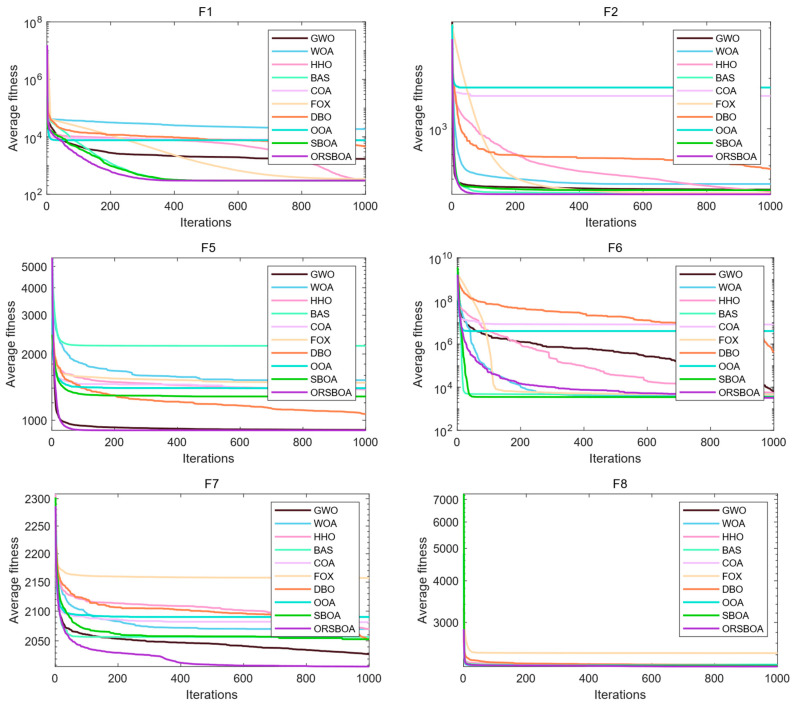 Figure 9
Figure 9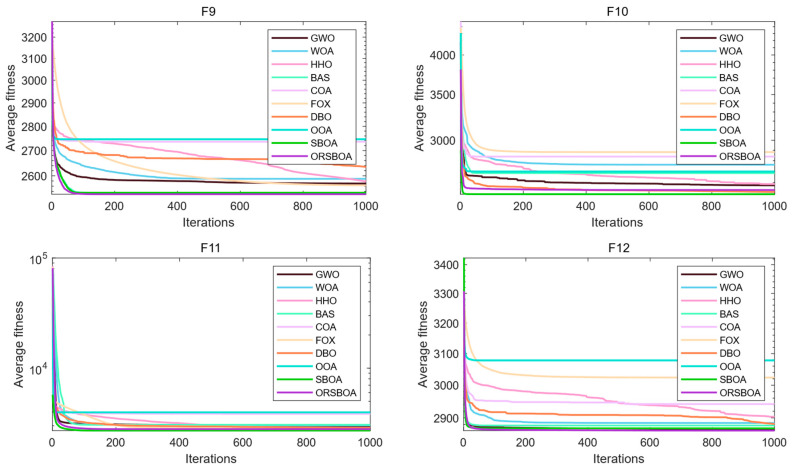 Figure 10
Figure 10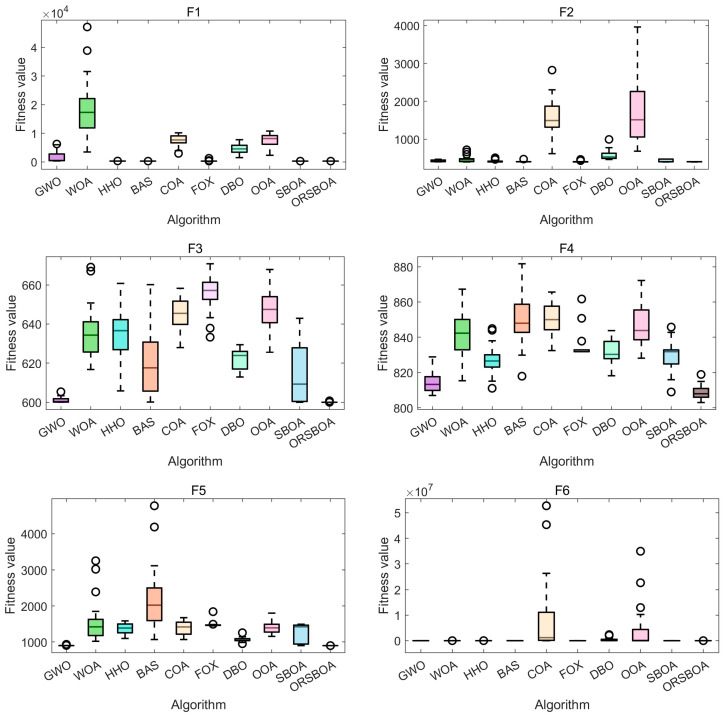 Figure 11
Figure 11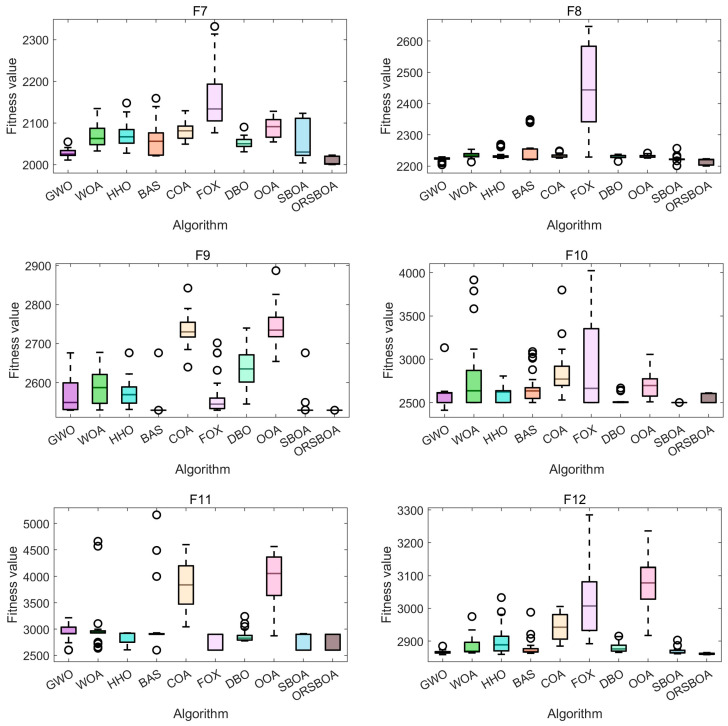 Figure 12
Figure 12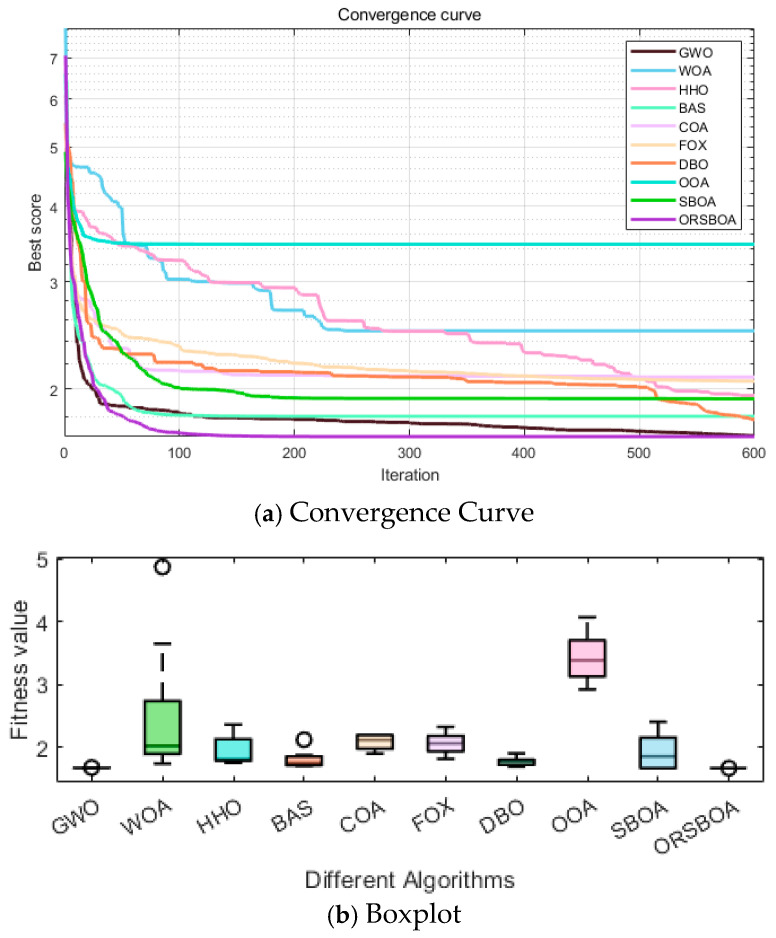 Figure 13
Figure 13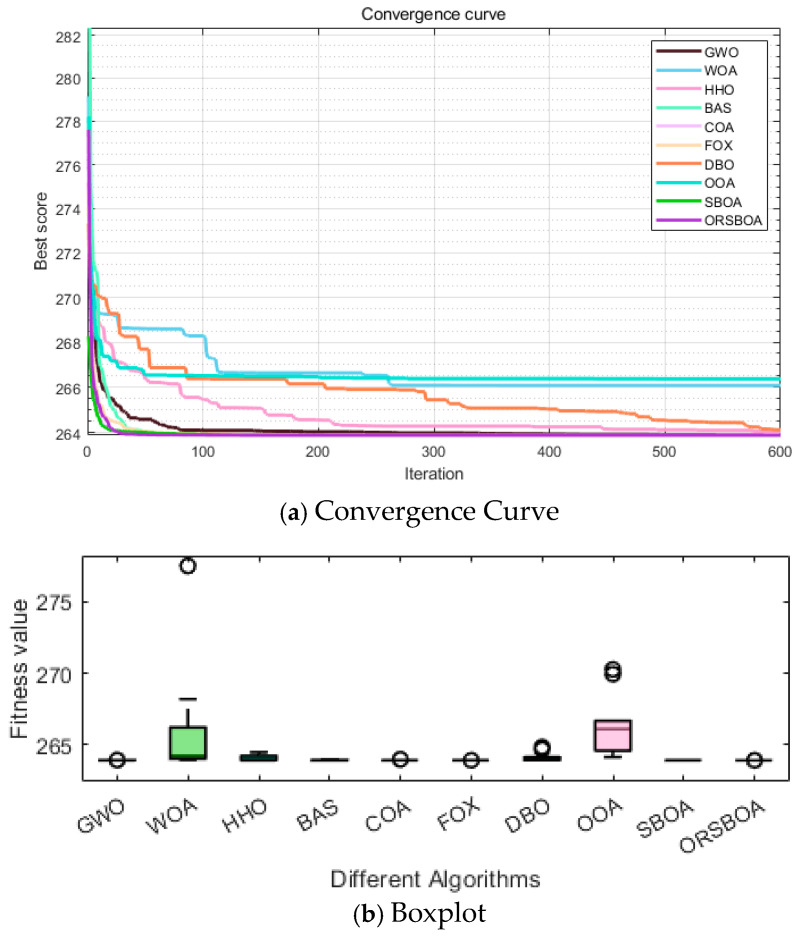 Figure 14
Figure 14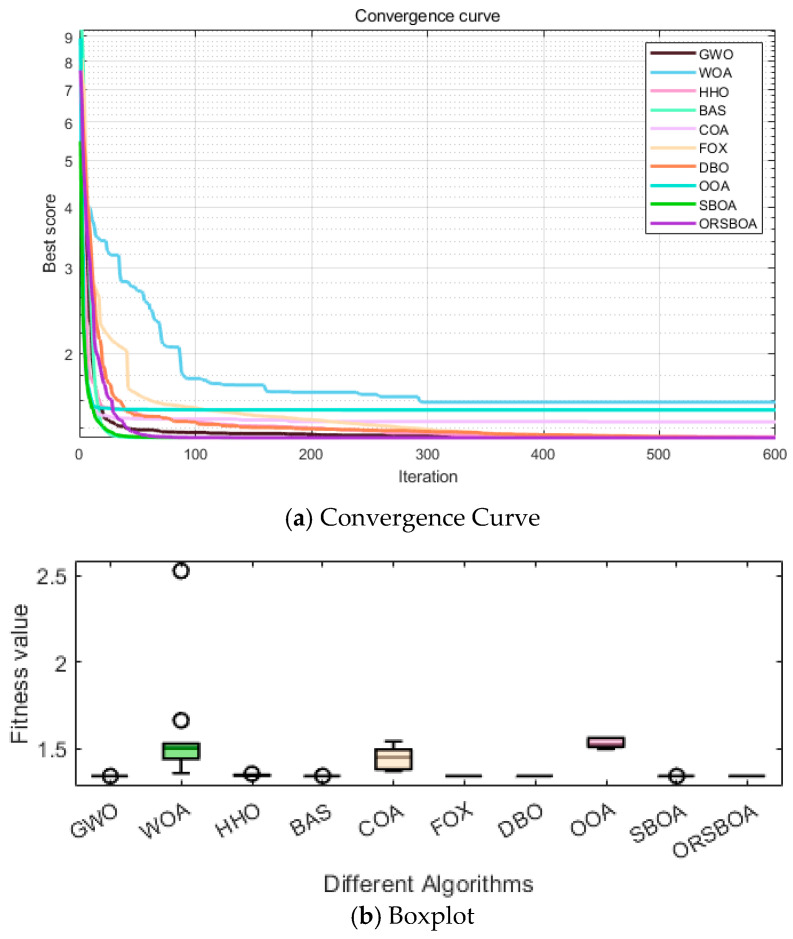 Figure 15
Figure 15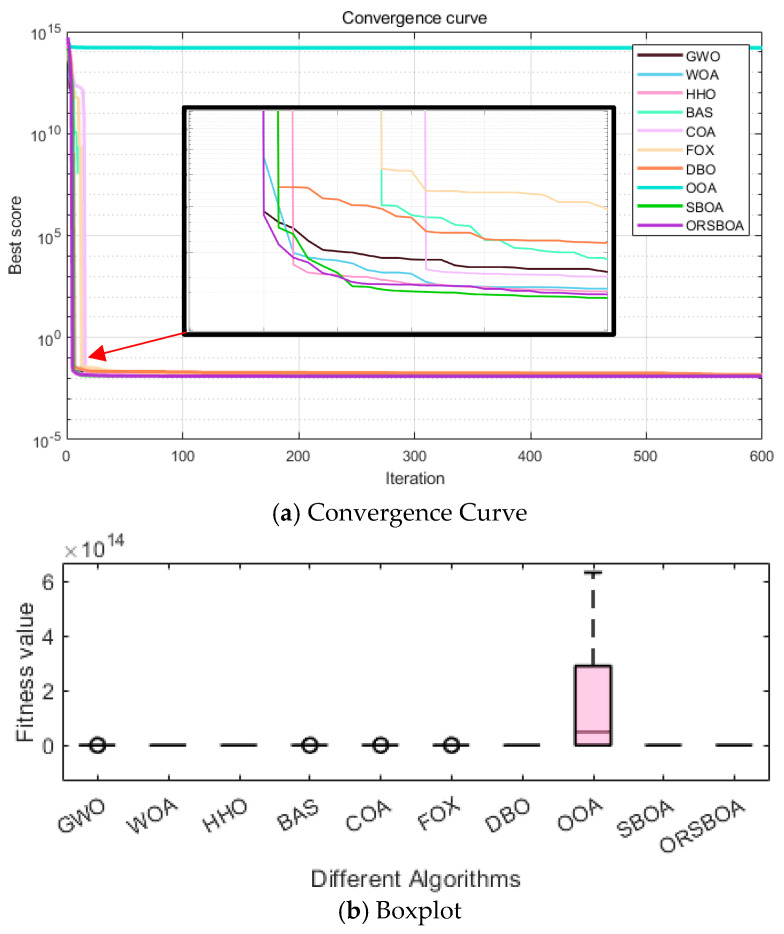 Figure 16
Figure 16- —Natural Science Foundation of Zhejiang Province
- —School-level Scientific Research Project of Wenzhou University of Technology
- —Wenzhou University of Technology
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMetaheuristic Optimization Algorithms Research · Advanced Multi-Objective Optimization Algorithms · Robotic Path Planning Algorithms
1. Introduction
The growing complexity of engineering optimization, image recognition, intelligent manufacturing, and network scheduling has brought high-dimensional, multimodal, and strongly constrained problems to the forefront of intelligent optimization research [1,2,3]. Deterministic methods often struggle with nonlinear, non-differentiable, or black-box objectives, whereas metaheuristics have become mainstream tools due to their strong global search ability, problem-independence, and simple structures [4,5,6,7]. Among them, nature-inspired algorithms—such as particle swarm optimization (PSO) [8], gray wolf optimization (GWO) [9], whale optimization (WOA) [10], and beetle antenna search (BAS) [11]—have been widely applied and rigorously studied.
The secretary bird optimization algorithm (SBOA) is a relatively new swarm intelligence method inspired by the predatory behavior of African secretary birds [12]. It models vision-guided tracking and multi-stage sprint attacks to balance global exploration and local exploitation. Prior studies report promising global search capability and rapid convergence on diverse benchmarks [13,14,15,16]. Nevertheless, SBOA still exhibits limitations, including insufficient local exploitation, difficulty in maintaining population diversity, and a tendency to be trapped in local optima—particularly in high dimensions [17]. In addition, its parameter-tuning mechanism is relatively static, reducing adaptability across scenarios [18].
To alleviate these issues, several improved variants have been proposed. Mai et al. [19] introduced CSBOA by combining chaotic initialization with improved differential mutation and crossover, achieving faster convergence and better solution quality on CEC2017/CEC2022 and engineering problems. Yan et al. [20] incorporated a hybrid chaotic mutation strategy to enhance SBOA, while Zhu et al. [21] proposed QHSBOA, which integrates quantum computing concepts and dynamic boundary adjustment for classification tasks. Although these variants deliver partial gains, many trade off exploration against exploitation (or vice versa) and thus fail to offer a balanced performance across heterogeneous landscapes.
In this work, the Optimal Neighborhood Perturbation and Reverse Learning Strategy based Secretary Bird Optimization Algorithm (ORSBOA) is proposed. Unlike prior improvements, ORSBOA simultaneously strengthens exploration and exploitation through two complementary mechanisms: (i) optimal neighborhood perturbation (ONP) [22], which refines local search by perturbing around the current best solutions, and (ii) a reverse learning strategy (RLS) [23], which enriches global exploration by generating candidate solutions in regions opposite to the current population. Together, these mechanisms enhance convergence speed, stability, and robustness [24,25,26,27,28].
The performance of ORSBOA is assessed on the CEC2019 [29] and CEC2022 [30] benchmark suites and four classical engineering design problems: welded beam, three-bar truss, cantilever beam, and compression spring [31,32]. Comparisons against nine mainstream algorithms evaluate accuracy, stability, and robustness; statistical tests and visualization analyses substantiate the significance and effectiveness of the observed improvements.
The main contributions are threefold:
- An improved algorithm (ORSBOA) is proposed that integrates ONP and RLS to concurrently enhance exploration and exploitation.
- The effectiveness of ORSBOA is systematically validated on benchmark suites and engineering problems, demonstrating superior accuracy, stability, and efficiency.
- Extensive experiments and statistical analyses confirm the superiority and adaptability of ORSBOA, offering practical value and methodological insight for the design of swarm intelligence algorithms.
2. Dual-Mechanism Enhanced Secretary Bird Optimization Algorithm
SBOA simulates the predatory behavior of secretary birds hunting snakes by mapping vision-guided tracking and multi-stage strikes into a position-update model for numerical optimization. The population explores the search space through stochastic position updates, where randomness regulates the effective exploration radius. However, on high-dimensional and multimodal problems, SBOA is prone to premature convergence due to limited local exploitation and a largely unidirectional search bias, which can yield unstable performance.
To overcome these limitations, two complementary mechanisms are embedded into the SBOA framework, forming ORSBOA: (i) optimal neighborhood perturbation, which intensifies local search by applying controlled perturbations around elite solutions to refine promising regions while preserving diversity; and (ii) a reverse learning strategy, which strengthens global exploration by generating candidate solutions in regions opposite to the current population distribution. Integrating ONP and RLS within a unified search scheme yields a more favorable exploration–exploitation balance and improves convergence speed, stability, and robustness on complex landscapes.
2.1. Secretary Bird Optimization Algorithm
SBOA models two characteristic behaviors of the secretary bird—wide-area search and precision strike—which correspond to the algorithm’s exploration and exploitation phases. The overall mechanism follows three sequential stages: initialization, exploration, and exploitation. In the initialization stage, a population is generated within the search bounds and the best individual is identified. During exploration, stochastic motions with random directions and adaptive step sizes broaden search coverage and maintain diversity. In the exploitation stage, the search becomes more directed, refining solutions around elite individuals with smaller steps to improve quality. By alternating exploration and exploitation, SBOA aims to balance global coverage and local refinement, and the detailed procedures are described as follows:
(1) Initialization
SBOA begins with population initialization. In a -dimensional search space, an initial population consisting of individuals is generated. Each individual represents a potential solution to the problem, and its initial position is randomly generated using the following equation:
where and represent the lower and upper bound vectors of the search space, respectively, and is a uniformly distributed random number within the interval .
(2) Exploration phase
In the exploration phase, SBOA simulates the secretary bird’s behavior of locating, exhausting, and attacking prey through a three-stage search process. The entire predation activity is divided into three equal time intervals, corresponding to the three phases of predation: searching for prey, exhausting prey, and attacking prey.
In the searching for prey stage, inspired by the idea of differential evolution, the position update of individuals is governed by the following equation:
where is the current iteration number, is the maximum number of iterations, denotes the new state of the -th secretary bird in the first stage, is the current position of the -th secretary bird, and are randomly selected candidate solutions in the first-stage iteration, is a randomly generated number in the interval , and represents the fitness value of the objective function.
In the exhausting prey stage, Brownian motion [33,34] is introduced to simulate the random movement of the secretary bird, thereby increasing the stochasticity of the search. The position update in the attacking prey stage is given by the following:
where is a random number generated from a standard normal distribution, and denotes the current best solution.
In the attacking prey stage, the current best solution is used to guide the search, and the position update of individuals is defined as follows:
where is a random number in the interval .
(3) Exploitation phase
In the exploitation phase, SBOA simulates the secretary bird’s camouflage and escape strategies. When the secretary bird senses a threat, it may choose either to camouflage itself or to flee rapidly. In the algorithm, the decision to perform camouflage (local fine-tuning) or escape (global search) is made based on the difference between the fitness value of the current solution and that of the historical best solution. corresponds to the camouflage phase, while represents the escape phase. The position update of individuals is given by the following:
Despite its novelty, SBOA exhibits several practical limitations. Its fixed perturbation scheme and largely unidirectional updates can erode population diversity; in high-dimensional, complex landscapes this often precipitates premature convergence to local optima and weakens global exploration [13]. Moreover, the local-search step size lacks adaptive regulation: overly large steps overshoot promising basins and destabilize convergence, whereas overly small steps slow progress and increase the risk of entrapment in local minima. Collectively, these issues degrade solution quality, reduce robustness, and constrain SBOA’s effectiveness on challenging multimodal and constrained problems.
2.2. Optimal Neighborhood Perturbation
Neighborhood-based search has proven effective across metaheuristics—for example, local perturbations in PSO to escape local optima, neighborhood-driven mutations in differential evolution to sharpen solutions, and perturbation moves in artificial bee colony to enhance diversity and exploitation. These studies consistently show that neighborhood perturbation can improve convergence accuracy and robustness.
In ORSBOA, ONP is embedded into the SBOA framework to strengthen local exploitation, while RLS preserves broad exploration, yielding a more balanced search process. ONP operates by generating small, controlled perturbations within a bounded neighborhood of the current best solution, thereby directing fine-grained refinement toward high-quality regions of the search space. By focusing computation around promising areas without sacrificing population diversity, ONP reduces premature convergence and stabilizes performance on high-dimensional, multimodal problems—complementing RLS to maintain global coverage.
Concretely, ONP perturbs the current global best within a dynamic neighborhood whose radius shrinks over time, enabling a coarse-to-fine local search and mitigating premature convergence on high-dimensional, multimodal landscapes. Specifically, a dynamic neighborhood is constructed based on the current global best solution , where decays exponentially with the increase in the number of iterations . The calculation formula is given by the following:
where is the initial neighborhood radius, is the decay control parameter, and is the maximum number of iterations. In the early stages of the algorithm, a larger enables broader neighborhood exploration, which facilitates the discovery of new potential solutions. As the iterations progress, gradually decreases, concentrating the search on the local neighborhood of the optimal solution for fine-tuned exploitation, thereby improving the solution quality.
A hybrid perturbation operator combining Gaussian perturbation and Cauchy perturbation is designed, and the perturbation mode is dynamically selected based on a probability . When , Gaussian perturbation is used to perform fine-grained search within the neighborhood. The corresponding formula is as follows:
where is the parameter controlling the intensity of the Gaussian perturbation, and is a random number following a standard Gaussian distribution. When , Cauchy perturbation is employed to escape from local optima. The update formula is as follows:
where is the parameter controlling the intensity of the Cauchy perturbation, and is a random number following a standard Cauchy distribution.
The local optimum escape mechanism of this strategy is analyzed using a Markov chain model. Suppose the algorithm becomes trapped at a local optimum . In the standard SBOA, the probability of escaping the local optimum in each iteration is denoted as .
Under the ONP strategy, due to the introduction of a dynamic neighborhood and the hybrid perturbation operator, the probability of escaping the local optimum in each iteration increases to .
This indicates that the ONP strategy can significantly enhance the algorithm’s ability to escape local optima and improve its global convergence performance.
2.3. Reverse Learning Strategy
RLS is a widely used diversity–enhancement mechanism in swarm intelligence. For a given solution, an opposite candidate is generated by reflecting the point with respect to the variable bounds. The intuition is that when a solution lies far from the global optimum, its opposite has a higher chance of being closer. Injecting these opposite candidates increases population diversity, mitigates premature convergence, and strengthens global exploration.
In ORSBOA, RLS complements ONP by supplying exploration-oriented candidates while ONP concentrates on local refinement. Opposite solutions are generated dynamically and integrated selectively: candidates compete with their counterparts (or with low-quality individuals), and replacements occur only when fitness is improved or when diversity falls below a threshold. This selective integration enriches information without disrupting convergence.
For the current solution , a dynamic opposite solution is generated using the following formula:
where is a random number uniformly distributed within the interval . A fitness-weighted factor is introduced and calculated based on the fitness value of the current solution and the average fitness value of the population, as given by the following formula:
The weighted factor is used to achieve adaptive integration of the current solution and its opposite solution, as defined by the following formula:
When is relatively small, becomes large, indicating that the current solution is of higher quality; thus, the fused solution tends to retain more characteristics of the current solution. Conversely, when is relatively large, becomes small, and the fused solution is more inclined to incorporate information from the opposite solution, thereby introducing diversity while preserving desirable features of high-quality solutions.
2.4. Optimal Neighborhood Perturbation and Reverse Learning Strategy Based Secretary Bird Optimization Algorithm
Building on SBOA, ORSBOA integrates ONP and RLS to enhance search capability and stability across different phases. The method establishes a unified hybrid framework that tightly couples global exploration with local exploitation: RLS injects exploration-oriented candidates from opposite regions of the search space, while ONP conducts fine-grained refinement around elite solutions. The two mechanisms operate in a mutually reinforcing, dynamically balanced manner to reduce premature convergence and improve convergence reliability on complex landscapes. The ORSBOA framework contains the following five main modules:
(1) Initialization
At the beginning of the search, the algorithm generates an initial population uniformly at random within the solution space , based on the predefined population size and problem dimension . Each individual represents a potential solution. After population initialization, fitness evaluation is performed, and the current best solution is recorded.
(2) Main search mechanism of the SBOA
In each generation, ORSBOA retains the core update model from SBOA, which simulates the secretary bird’s attack behavior. Individuals are guided to leap toward the current global best solution , while random perturbations are added to enhance the stochastic nature of the search. The update equation is as follows:
where and are the control factors for the search direction and perturbation intensity, respectively, and denotes a standard normal distribution. This strategy helps maintain directional search toward potential optimal regions of the solution space.
(3) Optimal neighborhood perturbation
To enhance the local search capability of elite individuals, a perturbation operation is applied after each iteration with a certain probability . The operation targets either the current global best individual or an elite individual. The perturbation region is constructed around the global best solution, and several perturbed individuals are generated using the following equation:
where is the scaling factor that controls the intensity of the perturbation. If the fitness of the perturbed individual is better than that of the original best solution, the global best position is updated accordingly; otherwise, the original state is retained. This mechanism is designed to improve the precision of local exploitation and enhance the depth of local solution refinement.
(4) Reverse learning strategy
To maintain population diversity and prevent premature convergence, ORSBOA applies a perturbation operation to the current global best or elite individuals in each generation with a probability . For the current solution , a dynamic opposite solution is generated using the following equation:
where is a random number uniformly distributed in the interval . Unlike traditional opposition-based learning strategies, the dynamic opposition-based learning strategy introduces a random number , which breaks the fixed mapping relationship of standard opposition and increases the randomness of the solution space. This allows the opposite solution to more broadly cover the search space. If the opposite solution is better than the original one, it replaces the current individual. This operation expands the coverage of the solution space and enhances the information gain of the population.
(5) Termination and convergence output
The iteration process terminates when the maximum number of iterations is reached, or when there is no significant improvement in the global best fitness value over several consecutive generations. At that point, the current global best individual and its corresponding objective function value are returned as the output. Algorithm 1 Pseudo code of ORSBOAInputs: the maximum number of iterations is T, the size of the population is N.Output: optimal position and fitness value .
- Initialize the population according to Equation (1) and specify the relevant parameters;
- to do
- ----- Exploration Phase -----
- :
- :
- according to Equation (2)
- :
- according to Equation (3)
- Else:
- according to Equation (4)
- End if
- ----- Exploitation Phase -----
- :
- :
- in Equation (5)
- Else:
- in Equation (5)
- End if
- ----- Global Update -----
- c. Perform global update according to Equations (13) and (14)
- End For
The whole hybrid search process is shown in Figure 1 and detailed in Algorithm 1 (Pseudo code of ORSBOA). ORSBOA maintains the strong global search capability, and at the same time, it constructs multi-level search dynamics through the dual enhancement mechanism. While maintaining the strong global search capability, ORSBOA constructs multi-level search dynamics through the dual enhancement mechanism, which significantly improves the adaptability of the algorithm to the complex functional landscape and enhances the convergence performance.
Within the optimization cycle, RLS and ONP play complementary roles: RLS injects opposite candidates to enlarge coverage and sustain diversity, whereas ONP performs controlled, neighborhood-based refinements around promising individuals. Their coordinated use enables a dynamic exploration–exploitation balance, yielding greater stability and robustness than baseline SBOA.
2.5. Comparison with Related Hybrid Approaches
Hybrid schemes that couple OBL with neighborhood perturbation have been extensively explored in metaheuristics. Many variants diversify the search via OBL while embedding neighborhood-based moves to improve convergence accuracy [35,36]. However, their triggers and intensities are often static, which limits adaptability across heterogeneous problem landscapes.
By contrast, ORSBOA integrates ONP and RLS within a dynamically coordinated framework. RLS injects opposite candidates to expand coverage and sustain diversity, whereas ONP applies controlled, bounded refinements around elite solutions. The two operators are scheduled and selected adaptively, yielding an on-the-fly balance between exploration and exploitation and reducing susceptibility to premature convergence.
Empirical comparisons on benchmark suites show that ORSBOA attains faster convergence and higher solution accuracy than closely related OBL–local-search hybrids [37]. In particular, RLS enhances global exploration—especially early or under stagnation—while ONP strengthens late-stage refinement without incurring notable computational overhead. This co-designed interaction distinguishes ORSBOA from prior hybrids that apply opposition or local search independently, delivering emergent gains absent in static couplings [38].
The computational complexity of ORSBOA remains ,where is population size, the dimensionality, and the iteration budget. The added costs of RLS and ONP are linear in and and thus do not alter the overall order relative to baseline SBOA, preserving practical scalability to medium- and large-scale problems.
3. Experimental Comparison and Result Analysis
To comprehensively assess ORSBOA, two widely used benchmark suites are employed: CEC2019 and CEC2022, both originating from the IEEE CEC single-objective optimization competitions and serving as de facto standards in evolutionary computation. CEC2019 includes unimodal, multimodal, hybrid, and composition functions with scalable dimensionality, primarily testing an algorithm’s ability to balance exploration and exploitation. CEC2022 features more rugged landscapes with multiple local optima, hybrid structures, and strong inter-variable dependencies, providing a stricter test of robustness and adaptability. Using both suites offers complementary perspectives on effectiveness across heterogeneous problem characteristics and difficulty levels.
3.1. Experimental Setup
All experiments were conducted in MATLAB R2021b on Windows 10 with an Intel Core i7-11800H CPU (Intel Corporation, Santa Clara, CA, USA; purchased in China) and 16 GB RAM. For reproducibility and fairness, all methods used identical budgets: population size , maximum iterations , and 30 independent runs per function. The problem dimension was set to ; variable bounds followed each suite’s specifications.
Comparative baselines comprise nine representative population-based optimizers: GWO [9], WOA [10], Harris Hawks optimization algorithm (HHO) [39], BAS [11], coyote optimization algorithm (COA) [40], fox optimization algorithm (FOX) [41], dung beetle optimization algorithm (DBO) [42], osprey optimization algorithm (OOA) [43] and SBOA. Control parameters for these algorithms were taken from their original sources or widely accepted recommendations; no method was retuned for this study. Uniform population sizes and iteration limits were applied across all algorithms to ensure a fair comparison.
Performance was summarized using Min (minimum), Std (standard deviation), Avg (arithmetic mean), Median, Worst, and Avg_time (average runtime). Statistical significance was examined via Wilcoxon rank-sum and Wilcoxon signed-rank tests [44,45]. Mean-rank diagrams and radar plots were used to visualize overall performance.
3.2. CEC2019 Experimental Results
In order to comprehensively evaluate the optimization performance of the proposed ORSBOA on standard benchmark functions, 10 functions (F1~F10) from the CEC2019 test set are selected as the benchmark test set. These functions cover single-peak, multi-peak, composite and complex hybrid types, and are characterized by non-trivial gradient, high-dimensional nonlinearity and dense local optimization. These features can comprehensively test the algorithm’s global search capability, convergence speed and stability under different problem complexities.
Overall, ORSBOA performs well on most of the tested functions. As shown in the average ranked radar plots of the algorithms on F1~F10 in Figure 2, ORSBOA is consistently located in the center region of the radar plots for many functions, indicating its excellent overall performance. In contrast, traditional algorithms such as WOA, BAS, and SBOA appear more frequently at the outer edges of the radar plot, indicating their relatively weak stability and search efficiency.
Figure 3 shows the histogram of the average rankings of the 10 functions. ORSBOA achieves the best average ranking of 4.00, outperforming DBO (4.10), FOX (4.60), and COA (4.50), and significantly outperforming WOA (7.60) and BAS (7.40). These results clearly demonstrate the performance advantages of ORSBOA in solving complex optimization problems.
According to the numerical statistics shown in Table 1, ORSBOA performs well in key metrics such as the optimal, mean and median values. For example, in function F5, ORSBOA not only achieves single-digit mean fitness values, but also has a significantly lower standard deviation compared with other algorithms, indicating that it has a stronger ability to jump out of the local optimums in dense clustering regions. In most functions, ORSBOA’s solution fluctuates less and its worst-case values and standard deviation remain low, reflecting its excellent robustness and convergence stability.
Although its computation time is slightly higher than that of lightweight algorithms such as GWO and BAS, it is still within a reasonable range. Considering the solution accuracy and efficiency, ORSBOA has strong practical applicability to engineering problems.
In terms of statistical significance, the test results shown in Table 2 and Table 3 indicate that ORSBOA is significantly different from the conventional algorithm on most of the tested functions. This confirms the statistically significant advantage of the improvements introduced by ORSBOA. ORSBOA achieved statistically significant advantages on 9 out of 10 functions compared to SBOA, further validating the effectiveness of the optimal neighborhood perturbation and the dyadic learning-based strategy in enhancing the algorithm’s convergence paths and solution space exploration.
Figure 4 shows the average convergence curves of each algorithm on functions F1~F10, which are used to evaluate the convergence speed and the exploration ability of the algorithms in the later stages. From the trend, ORSBOA shows a faster decrease in adaptation in the early stages of multiple functions, reflecting a strong global exploration ability. In the middle and late stages, its convergence curve stabilizes, reflecting a strong local exploration ability. For example, in functions F5, F6 and F7, ORSBOA converges significantly faster than the other algorithms and finally achieves better fitness values.
Figure 5 shows the boxplots of the algorithms on functions F1~F10, further illustrating the concentration and stability of the solution distribution. It is observed that ORSBOA has a significantly smaller range of box lines than most of the compared algorithms, which indicates lower variability and greater stability of the solution. Shorter whiskers and fewer outliers reflect the centralized distribution and controlled fluctuations of the solution.
Especially in functions such as F9 and F10, WOA algorithm and COA, etc. show obvious outliers and divergent solutions, while ORSBOA always maintains good stability and consistency, which highlights the robustness of ORSBOA in dealing with complex nonlinear optimization problems.
In summary, based on the multi-dimensional experimental results and statistical analysis, ORSBOA demonstrates excellent global optimization seeking ability, fast and stable convergence behavior, and significant robustness on CEC2019 benchmark functions, which significantly outperforms a variety of mainstream population intelligence optimization algorithms, including SBOA. These results validate the effectiveness of the proposed algorithmic improvement and lay a solid foundation for the practical application and further extension of ORSBOA in engineering optimization problems.
3.3. CEC2022 Experimental Results
In order to further verify the generality and robustness of ORSBOA in solving highly complex optimization problems, the CEC2022 benchmark function set is selected as the experimental platform. The function set contains 12 representative objective functions covering multi-peak, composite and hybrid types. These functions are complex in design and diverse in nature, and are widely used for evaluating algorithmic performance for high-dimensional, multi-peaked and irregular search space problems.
In terms of overall ranking performance, ORSBOA leads on most functions. The radar chart in Figure 6 shows the average ranking of each algorithm on functions F1~F12, and the ranking of ORSBOA is always located near the center, which indicates that it dominates the fitness optimization. The average ranking bar chart in Figure 7 shows that ORSBOA has an average ranking of 2.08, which is significantly better than several mainstream algorithms such as DBO (3.75), FOX (4.50), and HHO (5.08), as well as significantly better than the algorithms such as WOA (7.25) and BAS (7.08), etc. The average ranking of ORSBOA is 4.75 for this function set, which is moderate, but still lower than the improved ORSBOA, which has an average ranking of 4.75, and has a better performance than the improved ORSBOA. moderate, but still lower than the improved ORSBOA, thus verifying the effectiveness of the proposed hybrid strategy in improving the performance of the algorithm.
From the numerical statistics in Table 4, it can be seen that ORSBOA achieves the lowest mean and standard deviation on a number of functions such as F1, F2, F6, and F10, demonstrating excellent search accuracy and stability. For example, on the F6 function, ORSBOA significantly outperforms HHO, DBO, and GWO, not only obtaining a lower average fitness value, but also obtaining the smallest solution variance. Meanwhile, its best fitness value remains excellent on several functions, further highlighting its accuracy and consistency in global optimal search.
In terms of statistical significance, the results in Table 5 and Table 6 show that ORSBOA exhibits a significant difference in optimization performance from the other algorithms on the vast majority of the tested functions. p-values are generally lower than 0.05, and the significance level of some of the results is even as low as . Notably, in the pairwise comparison with SBOA, ORSBOA achieves statistical superiority on 10 out of 12 functions, further confirming the effectiveness of combining the optimal neighborhood perturbation and the Reverse learning strategy in enhancing the optimization performance.
Figure 8 shows the average convergence curves of the algorithm on the CEC2022 benchmark functions, providing a visual assessment of the algorithm’s speed of convergence and utilization capabilities. In terms of trends, ORSBOA exhibits a fast fitness degradation on most of the functions. Notably, for complex functions such as F1 and F6, the fitness value decreases significantly in the first 200 iterations and then maintains a steady decrease before finally converging to the neighborhood of the global optimum. In contrast, algorithms such as WOA and FOX have large fluctuations during the convergence process, and the search behavior is not so stable, resulting in the overall convergence performance not as good as that of ORSBOA. The box plots in Figure 9 further illustrate the robustness of the algorithms in terms of solution distribution. It can be seen that ORSBOA exhibits a compact box-and-line distribution and shorter whiskers for most functions, which indicates lower variability, fewer outliers and more concentrated solutions. In contrast, algorithms such as COA and WOA exhibit significant skewness and outliers on several functions, indicating that they are less stable and the optimization results are more sensitive to fluctuations in the initial population setting and search strategy.
Through multi-perspective performance analysis and statistical validation, ORSBOA shows excellent global search capability, good convergence stability and significant robustness on the CEC2022 test function set, and its overall performance exceeds that of SBOA and other mainstream optimization algorithms, which further validates its wide adaptability and practical value in solving high-dimensional complex optimization problems.
Although a separate ablation study was not performed, careful inspection of the convergence behaviors and performance trends reveals the complementary roles of ONP and RLS. ONP primarily enhances global exploration and robustness, as reflected in the improved performance on multimodal functions in CEC2019, while RLS mainly improves convergence accuracy and exploitation ability, as seen in the hybrid and composition functions in CEC2022. These observations confirm that the two strategies contribute differently yet synergistically to the overall effectiveness of ORSBOA.
3.4. Application of ORSBOA in Engineering Optimization Problems
3.4.1. Welded Beam
The objective of the welded beam structural optimization problem is to minimize the manufacturing cost while satisfying the engineering constraints such as strength and stiffness. The experimental results are shown in Table 7. ORSBOA achieves significant performance advantages in all the metrics. Its optimal solution is 1.670218, and the worst solution is only 1.670254, with a very small fluctuation range, which reflects the excellent stability and anti-interference ability of the algorithm. In addition, the average and median solutions are 1.670225 and 1.670221, respectively, which are almost the same as the optimal solution, indicating that the algorithm shows good convergence consistency in multiple independent runs.
In terms of robustness, the standard deviation of ORSBOA is only , which is significantly lower than that of HHO (0.224695), BAS (0.128668) and OOA (0.415338), which further verifies its stable performance in engineering optimization.
In terms of the average computation time, ORSBOA has a computation time of 0.227155 s, which is slightly higher than that of GWO (0.115776) and FOX (0.139073), but still lower than that of SBOA (0.392841) and OOA (0.219622). Considering the solution quality and computational efficiency, ORSBOA ensures the accuracy and stability while maintaining a reasonable computational cost, showing a strong value for engineering applications. In terms of statistical significance tests, the Wilcoxon signed-rank test shows that ORSBOA is significantly different from all other algorithms, and its p-value is always well below the 0.05 significance threshold. For example, ORSBOA reaches extremely significant levels compared to WOA ( ), HHO ( ), COA ( ) and DBO ( ). These results clearly show that the superior performance of ORSBOA on this problem is not only numerically superior but also statistically robust.
The Wilcoxon rank sum test also shows that all p-values are lower than when comparing ORSBOA to HHO, BAS, FOX, and DBO, suggesting that the performance improvements realized by ORSBOA are systematic and not due to randomness.
The convergence efficiency of ORSBOA is further verified by the average convergence curve shown in Figure 10a. From the figure, it can be seen that ORSBOA shows a rapid decreasing trend at the beginning of the iteration, which is significantly faster than the comparison algorithms such as WOA, FOX and COA. ORSBOA stabilizes rapidly near the global optimum within a relatively small number of iterations, which indicates that it has a strong global searching ability and a high local utilization accuracy.
Figure 10b shows the boxplots of the algorithms to demonstrate the stability of the solutions from the distributional perspective. The boxplots of ORSBOA are extremely compact in range, with minimal fluctuations and no obvious outliers, indicating that the distribution of the solutions is highly concentrated and exhibits excellent robustness and consistency.
3.4.2. Three-Bar Truss
The objective of the three-bar truss design problem is to minimize the weight of the structure while satisfying the stress, geometry and material strength constraints. This is a classical multivariate constrained structural optimization problem. As shown in Table 8, ORSBOA consistently exhibits excellent performance on this problem. Its optimal solution of 263.895984 outperforms the best results of all the compared algorithms, indicating its significant advantage in global optimization. In addition, its worst solution is 263.8963 and its average solution is 263.8959, with a very small difference between the two, indicating that ORSBOA obtains consistent and stable results over multiple independent runs.
Its standard deviation is only , which is much lower than that of WOA (4.2413) and OOA (2.155156), which further confirms that ORSBOA’s results have minimal fluctuation and stable convergence. In terms of computational efficiency, the average execution time of ORSBOA is 0.204208 s, which is better than that of HHO, BAS, COA, OOA, and SBOA, indicating that it maintains a high solution quality while ensuring strong runtime performance. In terms of statistical significance, the Wilcoxon signed-rank test results show that the p-value of ORSBOA compared to the other algorithms is well below the 0.05 significance threshold. In addition, the rank sum test results show that the p-value of ORSBOA is , which is significantly lower than the mean of the compared algorithms, verifying the high statistical reliability of the performance advantage of ORSBOA on this problem.
The average convergence curve shown in Figure 11a clearly indicates that ORSBOA rapidly reduces the objective function value in the early stage of optimization and maintains a stable downward trend in the later stage, eventually converging to a high-quality solution. In contrast, some comparison algorithms exhibit oscillatory behavior or premature convergence, resulting in less stable performance.
The corresponding boxplots are given in Figure 11b, further verifying the robustness advantage of ORSBOA. As can be seen from the figure, ORSBOA has the narrowest box line range and the most concentrated distribution of results with almost no outliers. Its median is also very close to the optimal solution, indicating that ORSBOA shows strong consistency over multiple runs, demonstrating the algorithm’s high robustness and practicality.
3.4.3. Cantilever Beam
The objective of the cantilever beam design problem is to minimize the weight of the structure while satisfying the physical constraints such as stress and deflection, which is a typical engineering optimization problem. As shown in Table 9, ORSBOA exhibits significant performance advantages in this problem. ORSBOA outperforms all other compared algorithms in all three key accuracy metrics—minimum, mean and median. Specifically, it achieves the lowest minimum value of 1.339957 among all methods, and the optimal solution is close to that value; its standard deviation is only , which is much lower than that of WOA, HHO, and BAS, indicating that the solution distribution is extremely concentrated over multiple independent runs, demonstrating excellent optimization stability. The worst solution is 1.339968, which also remains at a high quality level, further proving the excellent robustness and reliability of ORSBOA.
In terms of computational efficiency, although ORSBOA integrates multiple strategy mechanisms, its average running time is 0.069479 s, which is slightly higher than some lightweight algorithms but still lower than methods such as BAS (0.122796 s). This suggests that ORSBOA effectively balances the quality of the solution and computational efficiency, striking a good balance between accuracy and time cost.
In terms of statistical significance, the results of both Wilcoxon signed rank test and rank sum test confirm the statistical superiority of the optimization results of ORSBOA. Compared with algorithms such as GWO, WOA, HHO and COA, the p-value of the ORSBOA is consistently well below the significance threshold of 0.05, with a minimum value of . This indicates the significant and statistically reliable performance advantage of ORSBOA in solving cantilever beam design problems.
As shown in the average convergence curve in Figure 12a, ORSBOA converges rapidly at the beginning of the iteration, and is close to the optimal solution within the first 100 iterations. The subsequent optimization process remains stable with small fluctuations, showing strong global exploration and local exploitation capabilities.
The box plot in Figure 12b further supports the stability advantage of ORSBOA from the perspective of the distribution of the results, and the narrower range and fewer outliers of ORSBOA indicate that its solution concentration and consistency are better than that of the other algorithms. This advantage is especially evident when compared to WOA, COA and OOA.
3.4.4. Compression Spring
The objective of the compression spring design problem is to minimize the total manufacturing cost while strictly satisfying multiple constraints such as material strength, geometry and manufacturing feasibility. As shown in the statistical results in Table 10, ORSBOA achieves excellent performance on this problem. Its Min value reaches 0.012666, which is optimal among all algorithms, comparable to methods such as BAS and FOX, and superior to conventional algorithms such as WOA (0.012813) and FOX (0.012677).
In terms of Worse value, ORSBOA reaches 0.012729, which is not absolutely optimal but significantly better than algorithms with convergence instability problems such as COA (0.021509) and OOA ( ), thus proving the superior optimization stability of ORSBOA.
In terms of solution concentration and variability, the standard deviation and median of ORSBOA are and 0.012691, respectively, indicating that the solutions are highly concentrated in multiple runs and the results are tightly clustered around the optimal value, which reflects strong robustness. The average value of 0.012695 is also lower than most of the compared algorithms, indicating that ORSBOA not only performs well in a single run, but also maintains a highly stable optimization performance in the whole.
In terms of computational efficiency, the average running time of ORSBOA is 0.229789 s, which is slightly higher than that of lightweight algorithms such as GWO (0.118662) and WOA (0.14385), but is still within the acceptable range, especially considering its accuracy and convergence stability, which makes it valuable for practical application in engineering applications.
In terms of statistical significance, both the Wilcoxon signed rank test and the rank sum test results show that ORSBOA has a significant statistical advantage over most algorithms. The p-values of the signed rank test for comparisons with WOA, HHO, COA, and OOA were all well below the threshold of 0.05, with the lowest being reached . This is further confirmed by the results of the rank sum test, e.g., the p-value of for comparison with DBO, which clearly demonstrates that ORSBOA is able to maintain a stable and reliable optimization performance under complex constraint environments.
The average convergence curve in Figure 13a clearly shows that ORSBOA declines rapidly at the beginning of the iteration and approaches the global optimum region quickly. In the later stages, ORSBOA maintains a stable convergence, outperforming algorithms such as WOA and COA that exhibit significant oscillations and premature convergence trends.
The robustness of the algorithm is further confirmed by the boxplot in Figure 13b, where ORSBOA shows a compact distribution with few outliers and a median value close to the optimum, indicating that the algorithm consistently delivers stable results over multiple experiments.
4. Discussion
ORSBOA enhances SBOA in global exploration, local exploitation, and convergence stability through the coordinated action of ONP and RLS. Extensive experiments on CEC2019/CEC2022 and classical engineering cases consistently show gains in solution quality, robustness, and efficiency.
Mechanistic insight: ONP applies small, directed perturbations within a shrinking neighborhood of elite solutions, intensifying local refinement while preserving guidance and diversity. RLS generates opposite candidates that expand coverage and counteract early stagnation. Their complementary roles produce a stable exploration–exploitation balance, which is especially beneficial on multimodal, high-dimensional landscapes.
Benchmark evidence: On both suites, ORSBOA attains competitive or superior Min/Avg/Median with lower Std on most functions, indicating accuracy and run-to-run stability. Wilcoxon rank-sum and signed-rank tests corroborate these improvements, supporting their statistical reliability.
Engineering relevance: On welded beam, three-bar truss, cantilever beam, and compression spring problems—characterized by nonlinear objectives, tight constraints, and strong variable coupling—ORSBOA yields higher-quality designs, faster convergence, and tighter solution concentration than the baselines, demonstrating practicality for structural optimization.
Parameter sensitivity and trade-offs: Performance is influenced by the decay rate of the ONP neighborhood radius and the perturbation probability. Slower decay prolongs diversity and improves escape ability but can slow convergence; faster decay accelerates convergence yet increases stagnation risk. Higher perturbation probabilities enhance robustness across runs, whereas lower values favor efficiency at the expense of stability. A systematic sensitivity analysis will be pursued to quantify these effects.
Computational considerations: Due to ONP/RLS operations, ORSBOA incurs moderately higher overhead than lightweight methods such as GWO and BAS, though the overall complexity remains . When runtime is paramount, lightweight baselines may be preferable; otherwise, ORSBOA’s accuracy and robustness justify the additional cost.
Relation to recent hybrids: Unlike OBL–local-search hybrids that employ static triggers or independent operators, ORSBOA co-designs ONP and RLS with adaptive scheduling, yielding emergent benefits beyond simple aggregation and reducing susceptibility to premature convergence.
Limitations and outlook: In very high dimensions, diversity can erode, raising the risk of premature convergence. The current parameterization is static, which may limit adaptability in dynamic environments. Extensions to multi-objective, dynamic, and combinatorial settings remain to be verified. Future work will focus on (i) adaptive/self-tuning control of ONP/RLS, (ii) efficient variants for large-scale problems (e.g., sparse neighborhoods, surrogate assistance, selective operator invocation), and (iii) validation on more complex engineering tasks (e.g., multidisciplinary or heavily constrained designs).
Conclusion of discussion: ORSBOA offers a principled, empirically validated dual-mechanism enhancement for swarm optimization, improving robustness and solution quality on challenging benchmarks and engineering tasks while maintaining practical scalability.
5. Conclusions
A dual-mechanism enhanced secretary bird optimization algorithm, ORSBOA, was presented by integrating ONP and RLS to balance global exploration and local exploitation. Across CEC2019/CEC2022 and four classical engineering design problems, ORSBOA outperformed nine representative metaheuristics in convergence accuracy, robustness, and stability; nonparametric tests confirmed the statistical significance of these gains. The hybrid ONP–RLS framework provides actionable guidance for designing robust swarm optimizers and demonstrates practical value for complex engineering optimization.
Notwithstanding these strengths, ORSBOA entails moderately higher computational cost than lightweight baselines and may lose diversity in very high dimensions under static settings. Future research will explore adaptive parameter control, efficient implementations for large-scale scenarios, and extensions to dynamic and multi-objective optimization, as well as applications to real-time engineering tasks. Beyond performance improvements, this work highlights how complementary, biomimetic strategies—neighborhood interaction and reverse learning—can be co-designed to yield resilient population-based search.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Chakraborty A. Kar A.K. Swarm intelligence: A review of algorithms Nature-Inspired Computing and Optimization Springer Cham, Switzerland 2017475494
- 2Houssein E.H. Saeed M.K. Hu G. Al-Sayed M.M. Metaheuristics for solving global and engineering optimization problems: Review, applications, open issues and challenges Arch. Comput. Methods Eng.2024314485451910.1007/s 11831-024-10168-6 · doi ↗
- 3Archana R. Jeevaraj P.E. Deep learning models for digital image processing: A review Artif. Intell. Rev.2024571110.1007/s 10462-023-10631-z · doi ↗
- 4Chen C. Cao L. Chen Y. Chen B. Yue Y. A comprehensive survey of convergence analysis of beetle antennae search algorithm and its applications Artif. Intell. Rev.20245714110.1007/s 10462-024-10789-0 · doi ↗
- 5Tang J. Liu G. Pan Q. A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends IEEE/CAA J. Autom. Sin.202181627164310.1109/JAS.2021.1004129 · doi ↗
- 6Liu Y.F. Chang T.H. Hong M. Wu Z. So A.M.C. Jorswieck E.A. Yu W. A survey of recent advances in optimization methods for wireless communications IEEE J. Sel. Areas Commun.2024422992303110.1109/JSAC.2024.3443759 · doi ↗
- 7Benaissa B. Kobayashi M. Al Ali M. Khatir T. Elmeliani M.E.A.E. Metaheuristic optimization algorithms: An overview HCMCOU J. Sci.–Adv. Comput. Struct.202414336110.46223/HCMCOUJS.acs.en.14.1.47.2024 · doi ↗
- 8Kennedy J. Eberhart R. Particle swarm optimization Proceedings of the ICNN’95-International Conference on Neural Networks Perth, Australia 27 November–1 December 1995 IEEE New York, NY, USA 1995 Volume 419421948