Extended Kalman Filter-Based Visual Odometry in Dynamic Environments Using Modified 1-Point RANSAC
Jinhee Lee, Jaeyoung Kang

TL;DR
This paper introduces a new visual odometry method that improves accuracy in dynamic environments by tracking both static and moving objects.
Contribution
A modified 1-point RANSAC framework is proposed to estimate ego-motion and object-motion simultaneously in dynamic scenes.
Findings
The modified 1-point RANSAC detects dynamic objects and uses them for pose estimation.
Combining static and dynamic landmarks improves robustness in complex environments.
The method is inspired by adaptive strategies in biological vision systems.
Abstract
Visual odometry in dynamic environments is particularly challenging, as moving objects often cause incorrect data associations and large pose estimation errors. Traditional EKF-based VO methods rely on 1-point RANSAC to reject outliers under the assumption of a static world, thereby discarding dynamic landmarks as noise. However, in practice, outliers may arise not only from measurement errors but also from the motion of objects. To address this issue, we propose a modified 1-point RANSAC framework that detects dynamic objects and leverages both static and dynamic landmarks for ego-motion estimation. Inspired by adaptive strategies observed in biological vision systems, our approach integrates EKF-based state estimation with dynamic object tracking to achieve simultaneous ego-motion and object-motion estimation, improving robustness in complex and dynamic scenes.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
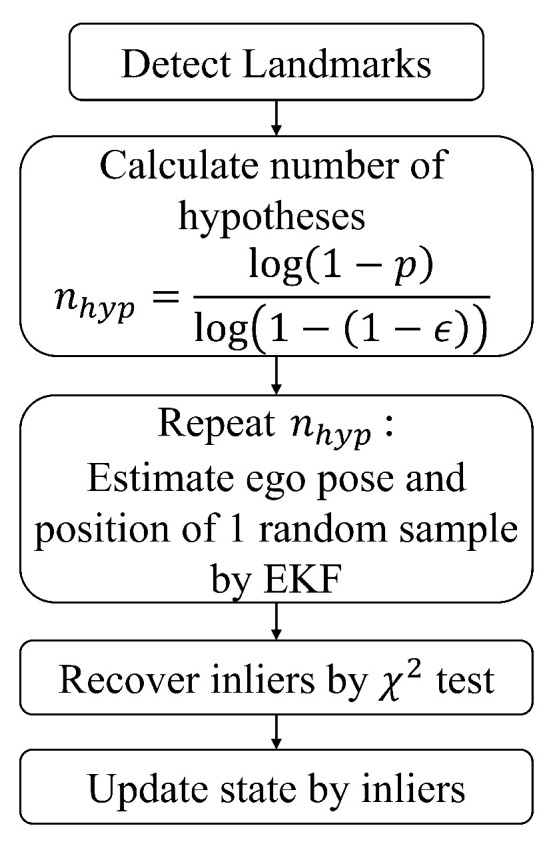 Figure 1
Figure 1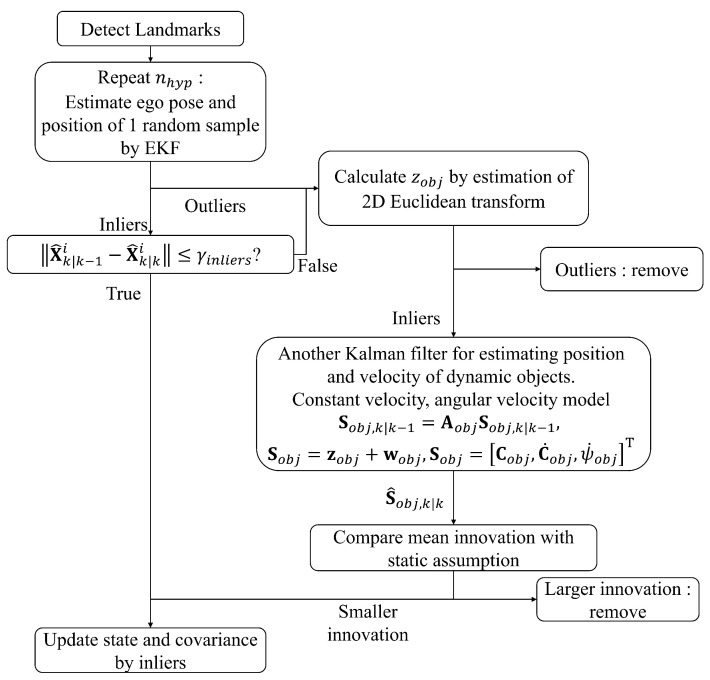 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4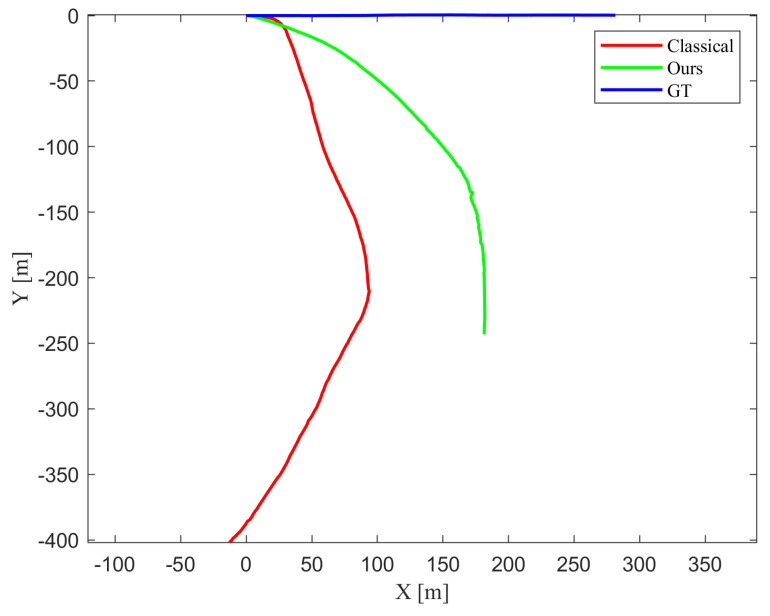 Figure 5
Figure 5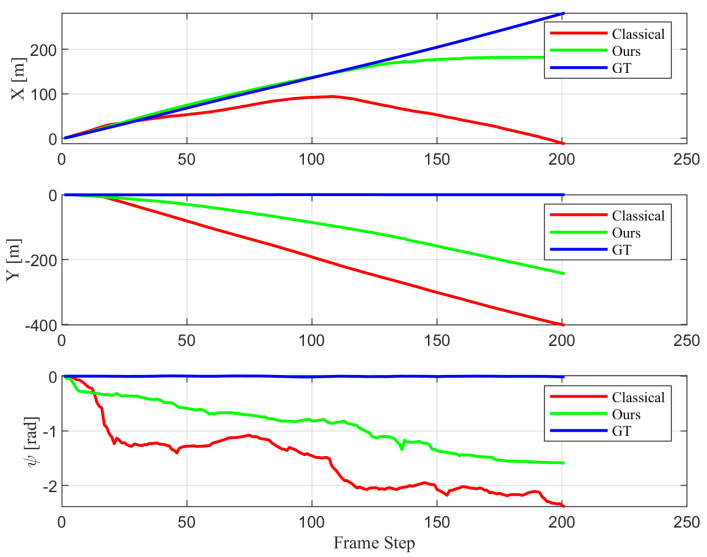 Figure 6
Figure 6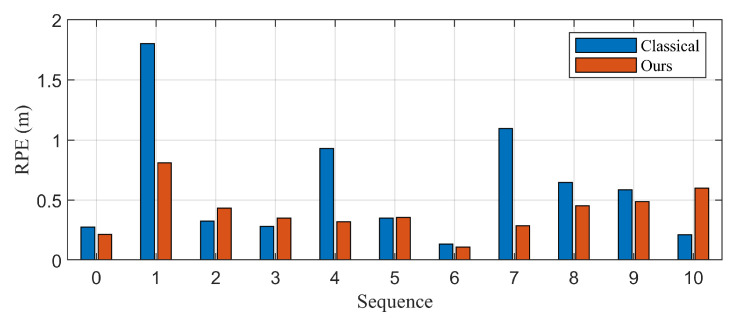 Figure 7
Figure 7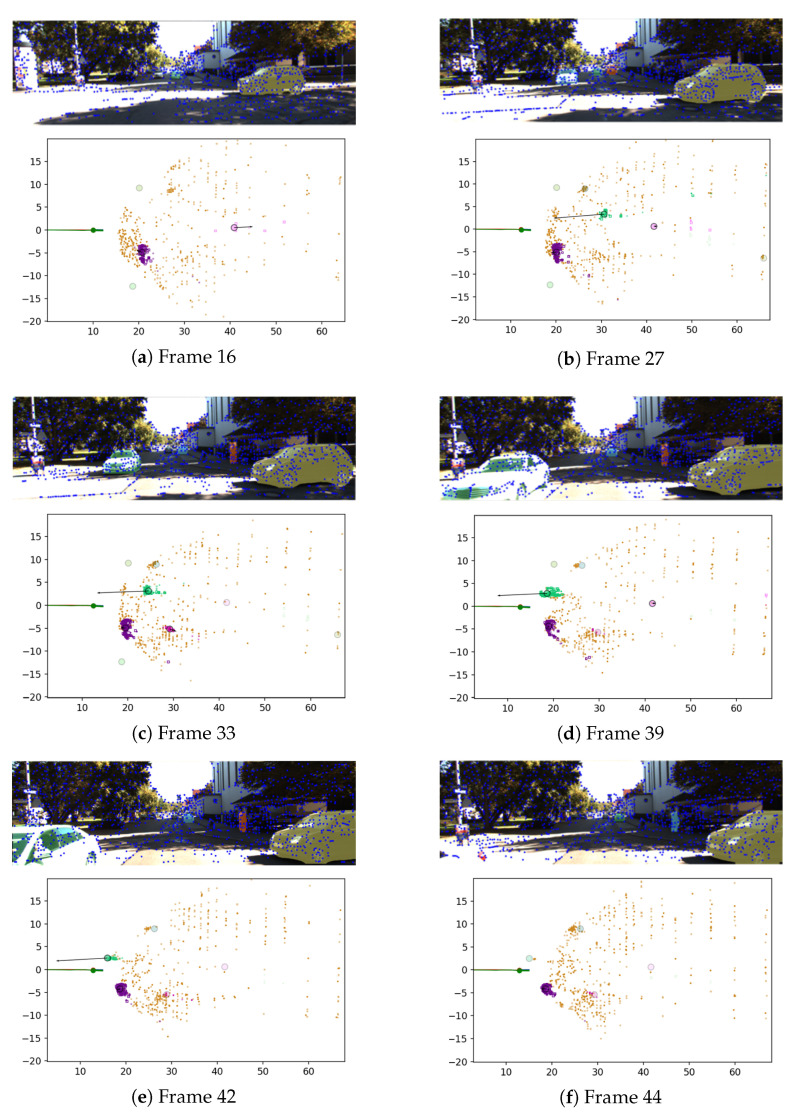 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · Image and Object Detection Techniques