Data: WireFishing-M: A multimodal dataset for deformable cable insertion using tactile, visual, and proprioceptive sensing
Tianyu Zhou, Hengxu You, Fang Xu, Jing Du

TL;DR
WireFishing-M is a new dataset for robotic tasks involving deformable objects, combining tactile, visual, and proprioceptive data during cable insertion.
Contribution
The novelty lies in providing a synchronized multimodal dataset for deformable object manipulation with tactile, visual, and proprioceptive sensing.
Findings
The dataset includes seven cable types with synchronized tactile, visual, and joint state data.
WireFishing-M supports multimodal model development for perception and manipulation tasks.
The dataset is publicly available for benchmarking and learning in robotic applications.
Abstract
This article introduces WireFishing-M, a multimodal dataset designed to support research in deformable object manipulation, tactile sensing, and contact-rich robotic tasks. The dataset captures a robotic wire insertion scenario, where a Franka Emika Panda 7-DOF robotic manipulator equipped with an Allegro Robot Hand and a DIGIT tactile sensor performs repeated cable insertions into a transparent l-shaped PVC pipe (1″ Sch 40 NSF-61). The dataset includes seven different types of cables varying in physical properties. For each cable, we collected synchronized GelSight tactile images, multi-view RGB videos (front view, bottom view, and a side view monitoring the pipe opening for insertion outcome), end-effector poses, robot joint states, and externally estimated forces at the end-effector. The tactile sensor continuously captures contact interactions as the robot grips, inserts, and exits…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
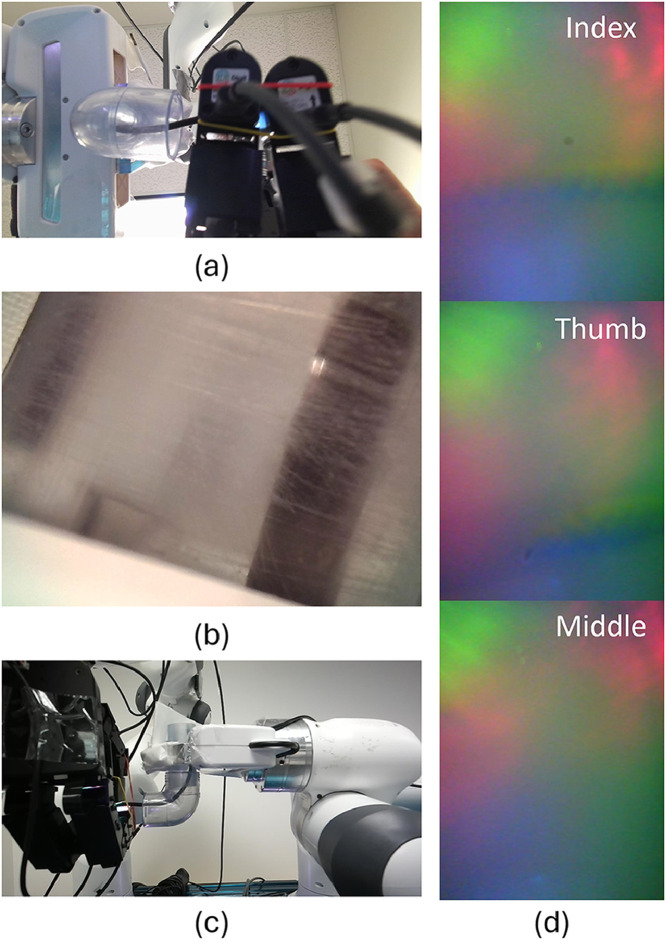 Figure 1
Figure 1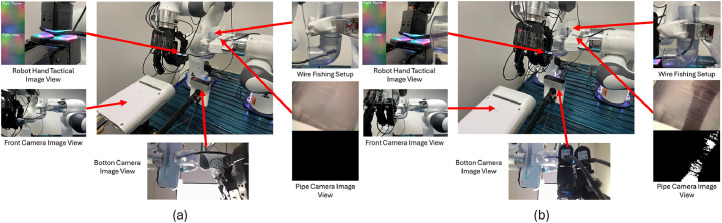 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTactile and Sensory Interactions · Robot Manipulation and Learning · Soft Robotics and Applications