A Trinocular System for Pedestrian Localization by Combining Template Matching with Geometric Constraint Optimization
Jinjing Zhao, Sen Huang, Yancheng Li, Jingjing Xu, Shengyong Xu

TL;DR
This paper introduces a trinocular vision system that improves pedestrian localization accuracy and speed by combining template matching with geometric constraints.
Contribution
A novel trinocular stereo vision framework that integrates template matching with geometric constraint optimization for improved pedestrian localization.
Findings
The proposed trinocular system achieves a mean absolute error of 0.435 m in pedestrian localization.
The system processes each target in 3.13 ms and maintains real-time performance for up to nine pedestrians.
The method outperforms binocular approaches like Semi-Global Block Matching and RAFT-Stereo in accuracy.
Abstract
Pedestrian localization is a fundamental sensing task for intelligent outdoor systems. To overcome the limitations of accuracy and efficiency in conventional binocular approaches, this study introduces a trinocular stereo vision framework that integrates template matching with geometric constraint optimization. The system employs a trinocular camera configuration arranged in an equilateral triangle, which enables complementary perspectives beyond a standard horizontal baseline. Based on this setup, an initial depth estimate is obtained through multi-scale template matching on the primary binocular pair. The additional vertical viewpoint is then incorporated by enforcing three-view geometric consistency, yielding refined and more reliable depth estimates. We evaluate the method on a custom outdoor trinocular dataset. Experimental results demonstrate that the proposed approach achieves a…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
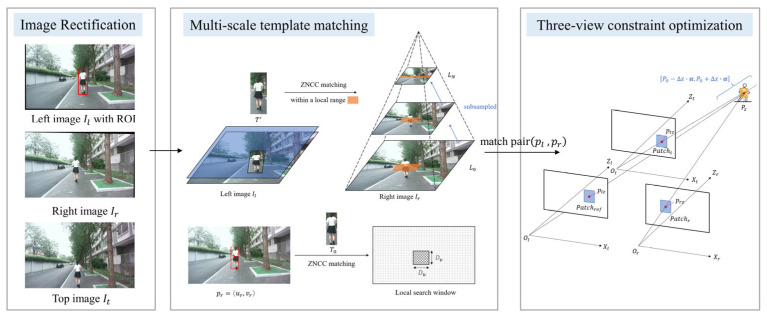 Figure 1
Figure 1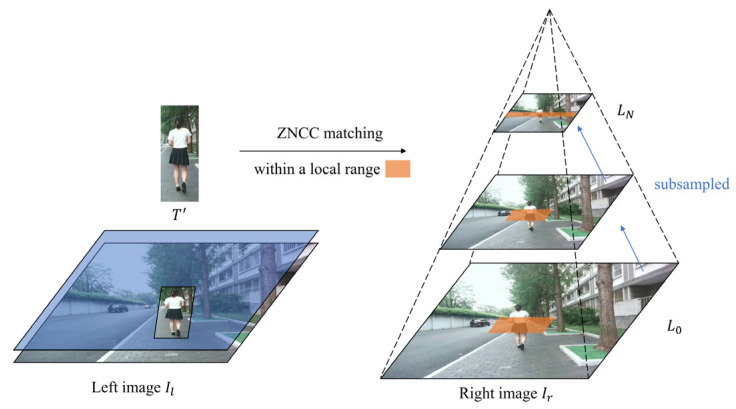 Figure 2
Figure 2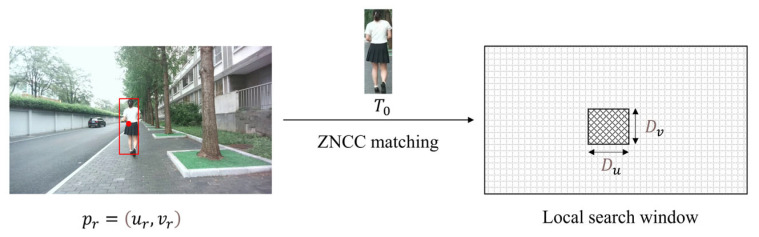 Figure 3
Figure 3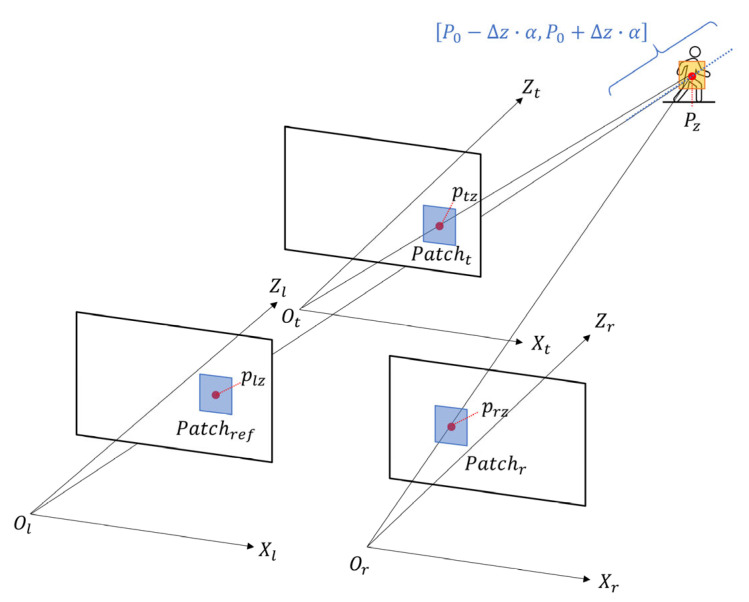 Figure 4
Figure 4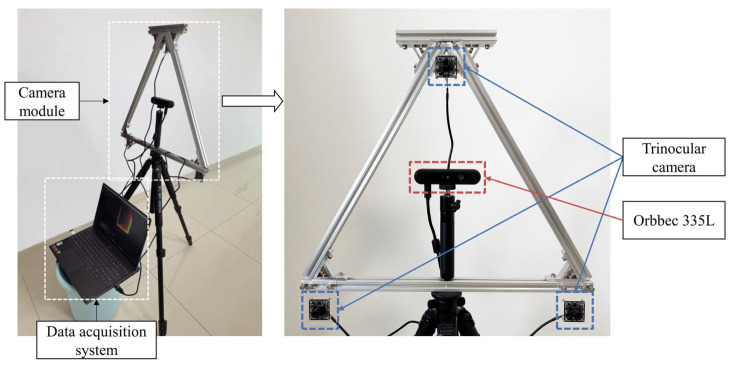 Figure 5
Figure 5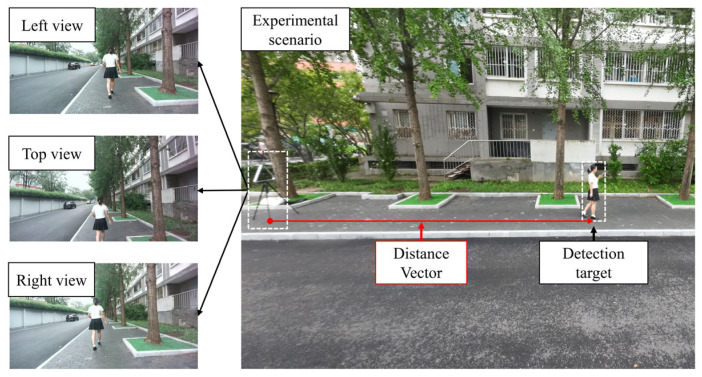 Figure 6
Figure 6 Figure 7
Figure 7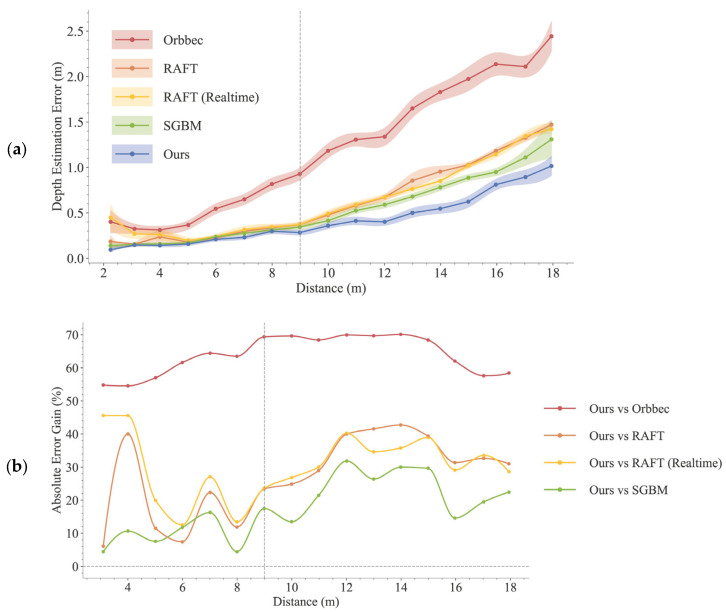 Figure 8
Figure 8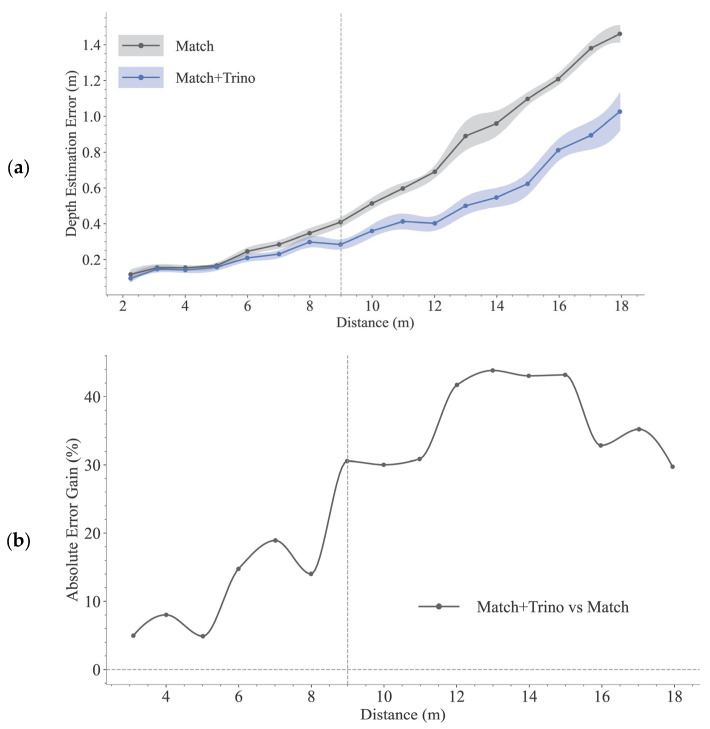 Figure 9
Figure 9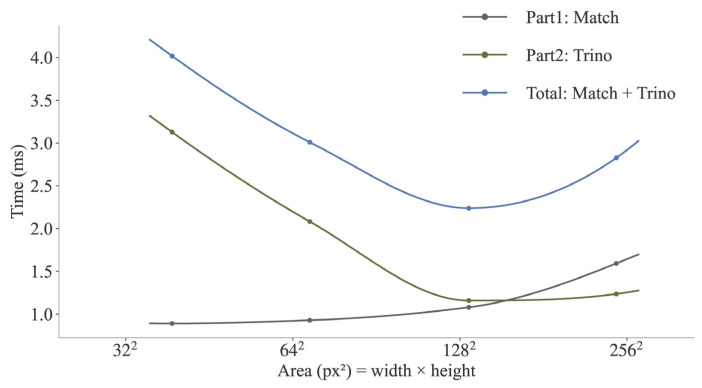 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Vision and Imaging · Robotics and Sensor-Based Localization · Video Surveillance and Tracking Methods