Fault Point Search with Obstacle Avoidance for Machinery Diagnostic Robots Using Hierarchical Fuzzy Logic Control
Rui Mu, Ryojun Ikeura, Hongtao Xue, Chengxiang Zhao, Peng Chen

TL;DR
This paper introduces a new fuzzy logic-based algorithm for diagnostic robots to navigate and avoid obstacles while reaching fault points in factory environments.
Contribution
The novel contribution is a hierarchical fuzzy logic control system with dynamic safety boundaries and multi-objective planning for improved robot navigation and obstacle avoidance.
Findings
The algorithm successfully guides diagnostic robots to within 30 cm of fault points.
Collision avoidance with equipment and obstacles is achieved through dynamic safety boundaries and relative speed analysis.
Simulation results show enhanced completeness and safety in fault point searching.
Abstract
Higher requirements have been placed on fault detection for continuously operating machines in modern factories. Manual inspection faces challenges related to timeliness, leading to the emergence of autonomous diagnostic robots. To overcome the safety limitations of existing diagnostic robots in factory environments, a hierarchical fuzzy logic-based navigation and obstacle avoidance algorithm is proposed in this study. The algorithm is constructed based on zero-order Takagi–Sugeno type fuzzy control, comprising subfunctions for navigation, static obstacle avoidance, and dynamic obstacle avoidance. Coordinated navigation and equipment protection are achieved by jointly considering the information of the fault point and surrounding equipment. The concept of a dynamic safety boundary is introduced, wherein the normalized breached level is used to replace the traditional distance-based…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
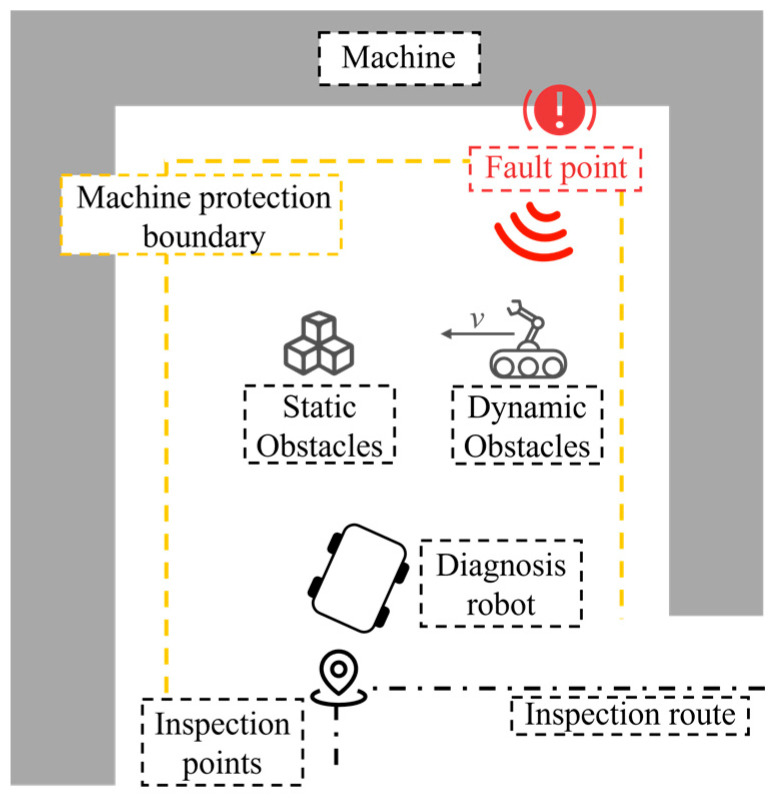 Figure 1
Figure 1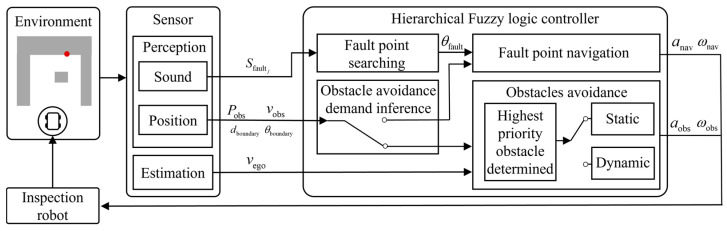 Figure 2
Figure 2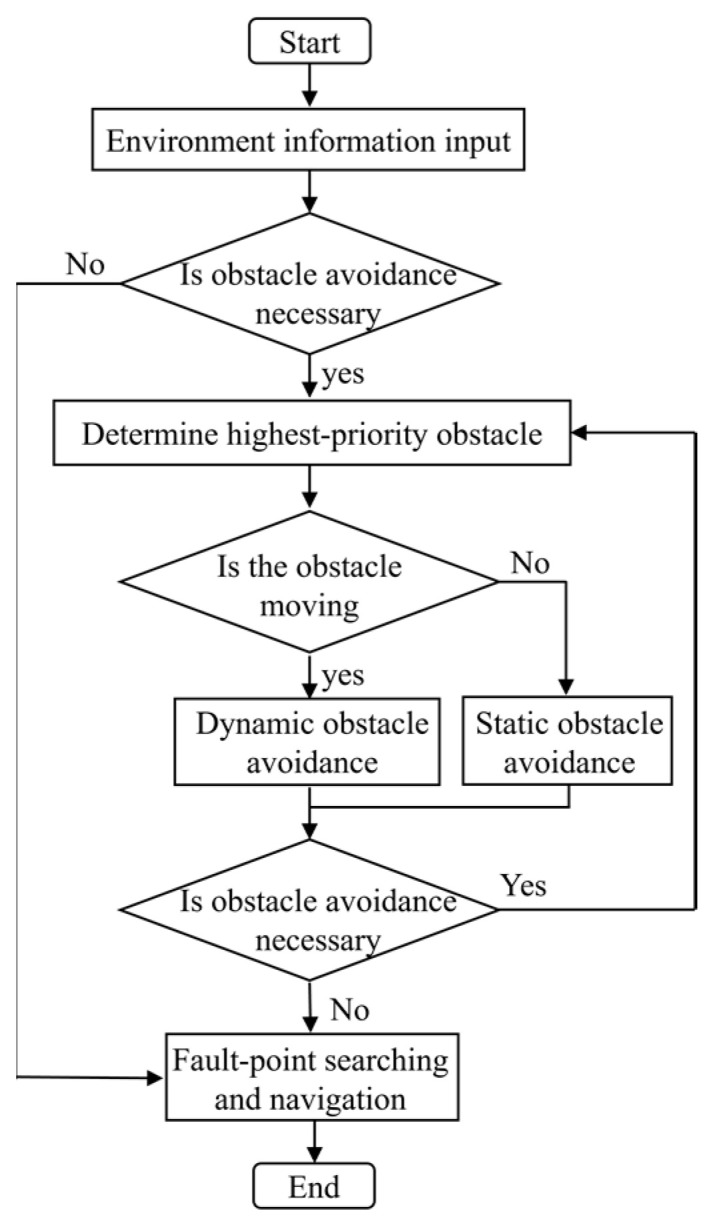 Figure 3
Figure 3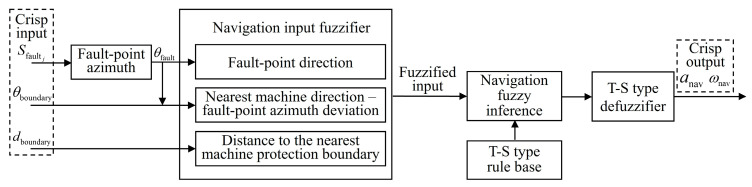 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13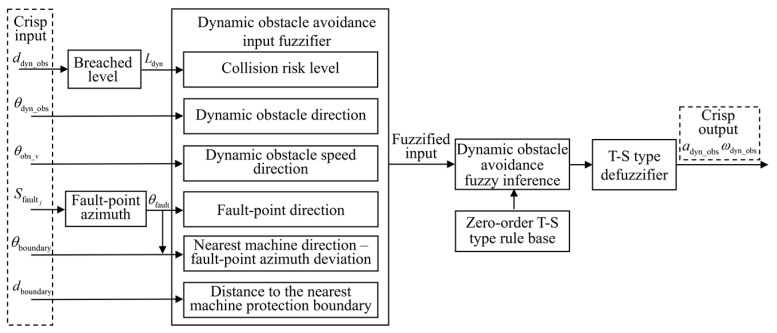 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35 Figure 36
Figure 36Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Fuzzy Logic and Control Systems · Robot Manipulation and Learning