Model-Free Transformer Framework for 6-DoF Pose Estimation of Textureless Tableware Objects
Jungwoo Lee, Hyogon Kim, Ji-Wook Kwon, Sung-Jo Yun, Na-Hyun Lee, Young-Ho Choi, Goobong Chung, Jinho Suh

TL;DR
This paper introduces a new method for estimating the 3D position and orientation of textureless tableware using a transformer model and depth data, enabling robots to grasp objects more effectively.
Contribution
A model-free and texture-free 6-DoF pose estimation framework using transformer architecture and geometry-based features from depth images.
Findings
The method achieves an average rotational error of 3.53 degrees and translational error of 13.56 mm.
Real-world experiments show successful autonomous recognition and collection of tableware by a mobile robot.
Geometry-based features like surface vertices and rim normals provide strong structural priors for pose estimation.
Abstract
Tableware objects such as plates, bowls, and cups are usually textureless, uniform in color, and vary widely in shape, making it difficult to apply conventional pose estimation methods that rely on texture cues or object-specific CAD models. These limitations present a significant obstacle to robotic manipulation in restaurant environments, where reliable six-degree-of-freedom (6-DoF) pose estimation is essential for autonomous grasping and collection. To address this problem, we propose a model-free and texture-free 6-DoF pose estimation framework based on a transformer encoder architecture. This method uses only geometry-based features extracted from depth images, including surface vertices and rim normals, which provide strong structural priors. The pipeline begins with object detection and segmentation using a pretrained video foundation model, followed by the generation of…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
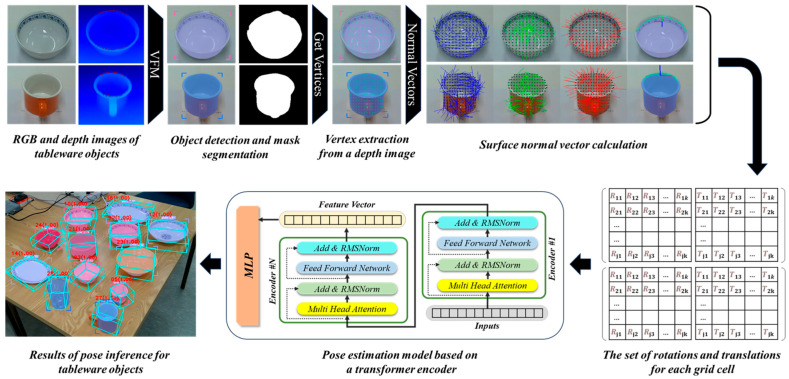 Figure 1
Figure 1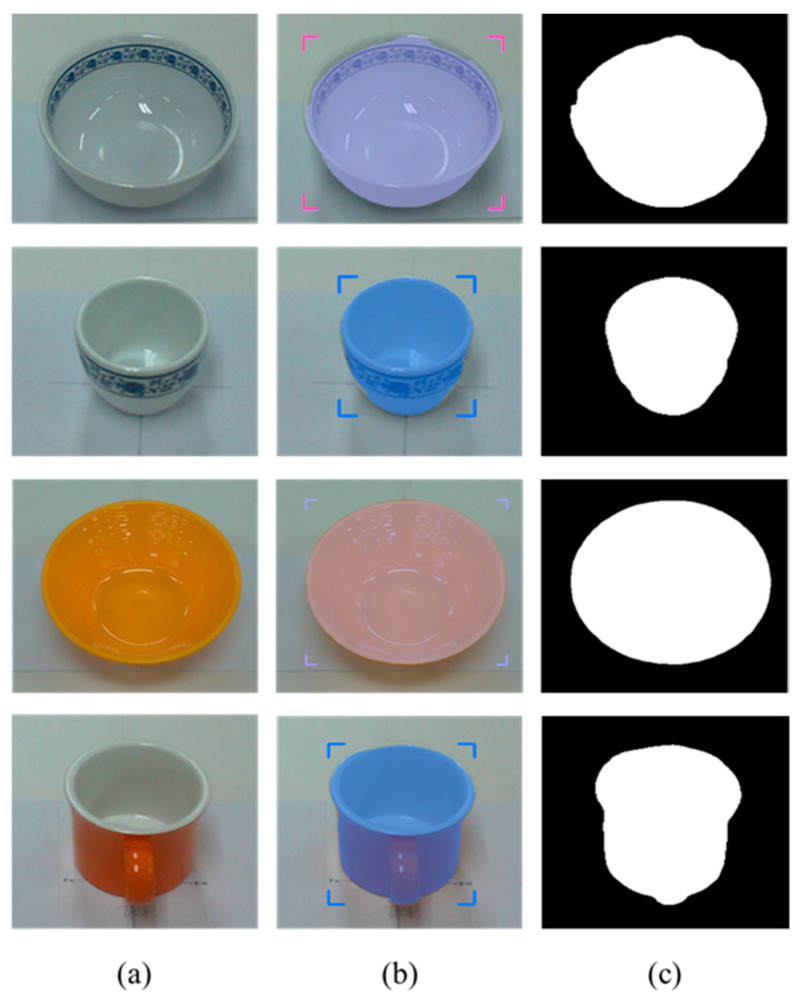 Figure 2
Figure 2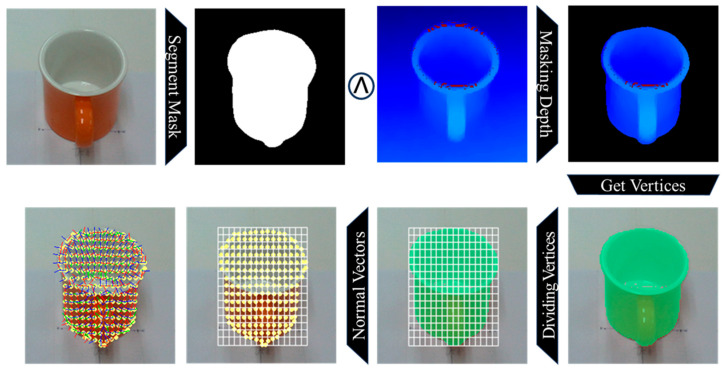 Figure 3
Figure 3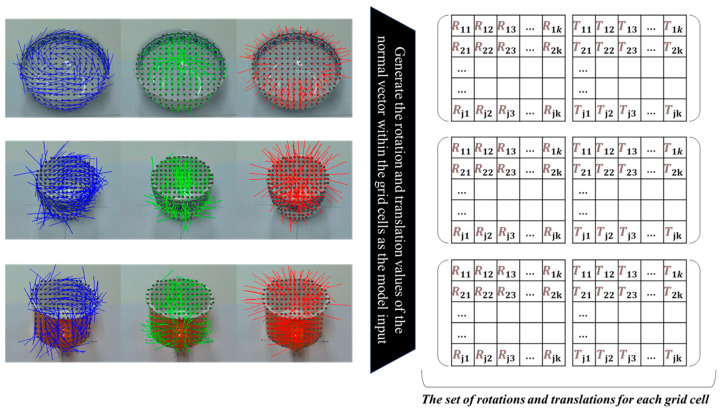 Figure 4
Figure 4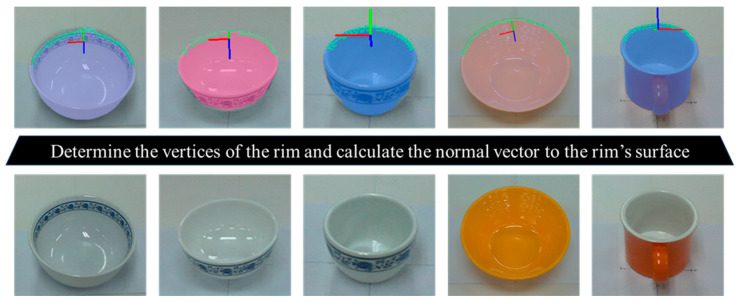 Figure 5
Figure 5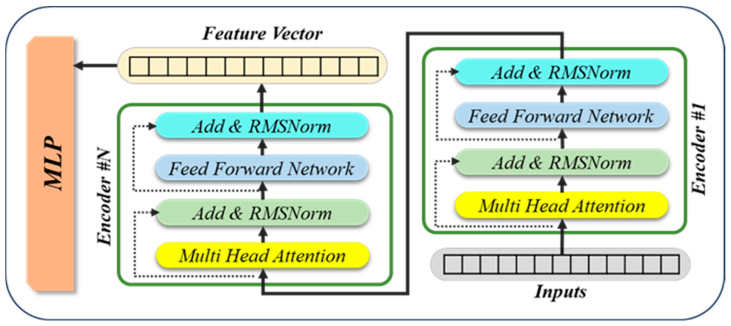 Figure 6
Figure 6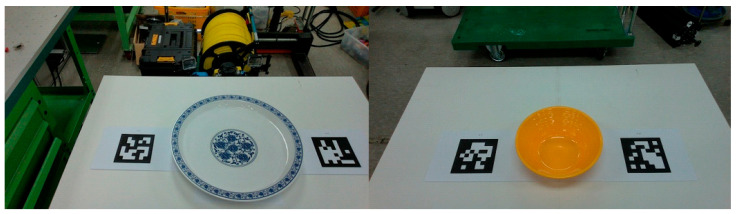 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9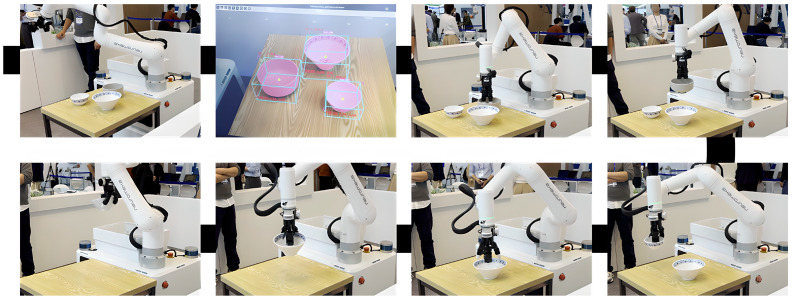 Figure 10
Figure 10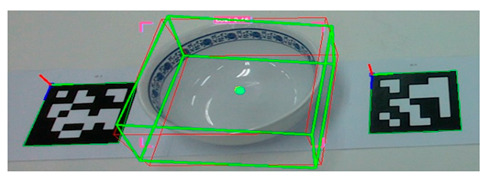 Figure 11
Figure 11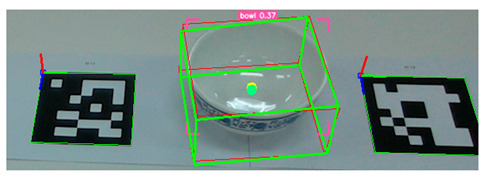 Figure 12
Figure 12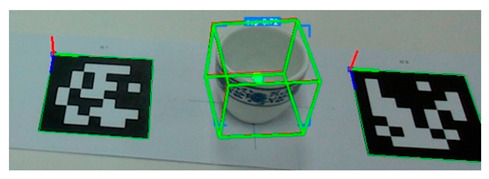 Figure 13
Figure 13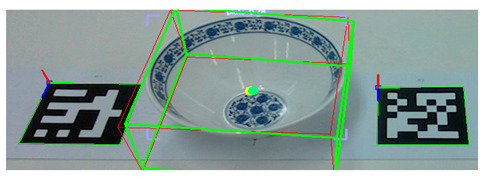 Figure 14
Figure 14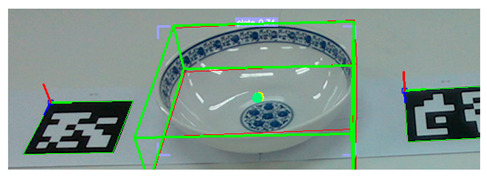 Figure 15
Figure 15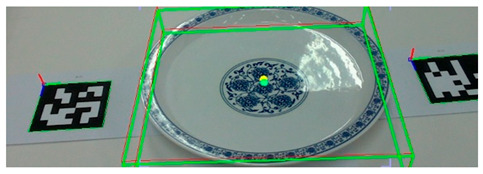 Figure 16
Figure 16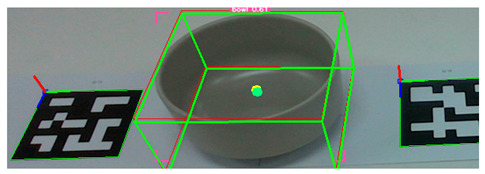 Figure 17
Figure 17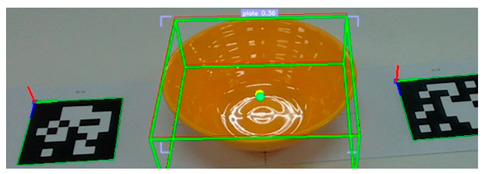 Figure 18
Figure 18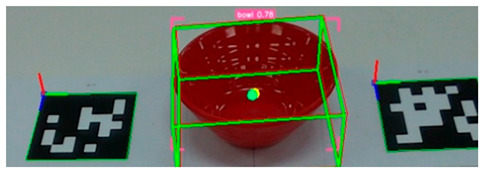 Figure 19
Figure 19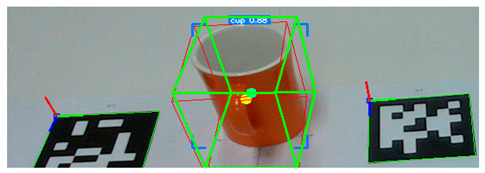 Figure 20
Figure 20Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Robotics and Sensor-Based Localization · Soft Robotics and Applications