Attention-Enhanced Semantic Segmentation for Substation Inspection Robot Navigation
Changqing Cai, Yongkang Yang, Kaiqiao Tian, Yuxin Yan, Kazuyuki Kobayashi, Ka C. Cheok

TL;DR
This paper introduces a robot for inspecting outdoor substations that uses improved attention-based segmentation and GPS to navigate challenging environments.
Contribution
The novel integration of ECA-SimAM, CBAM, and GPS-guided attention modules in a lightweight DeepLabV3+ model for substation navigation.
Findings
The proposed method achieves 85.26% mean IoU and 89.45% mean pixel accuracy in segmentation.
The system outperforms U-Net, PSPNet, HRNet, and standard DeepLabV3+ in challenging conditions.
The robot demonstrates robustness and scalability in real-world substation inspections.
Abstract
Outdoor substations present complex conditions such as uneven terrain, strong illumination variations, and frequent occlusions, which pose significant challenges for autonomous robotic inspection. To address these issues, we develop an embedded inspection robot that integrates attention-enhanced semantic segmentation with GPS-assisted navigation for reliable operation. A lightweight DeepLabV3+ model is improved with ECA-SimAM and CBAM attention modules and further extended with a GPS-guided attention component that incorporates coarse location priors to refine feature focus and improve boundary recognition under challenging lighting and occlusion. The segmentation outputs are used to generate real-time road masks and navigation lines via center-of-mass and least-squares fitting, while RTK-GPS provides global positioning and triggers waypoint-based behaviors such as turning and stopping.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
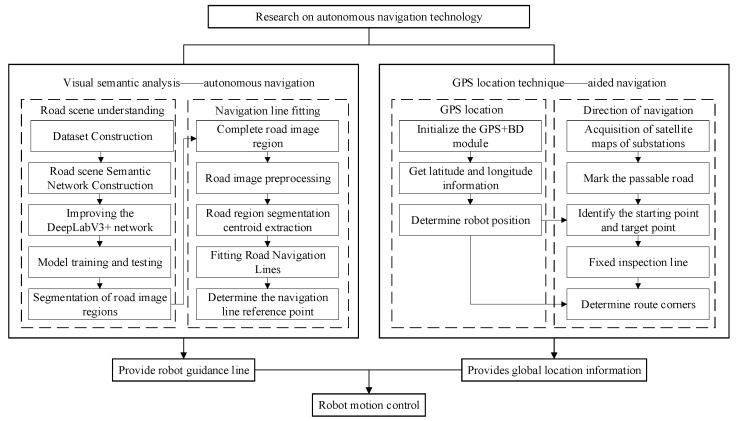 Figure 1
Figure 1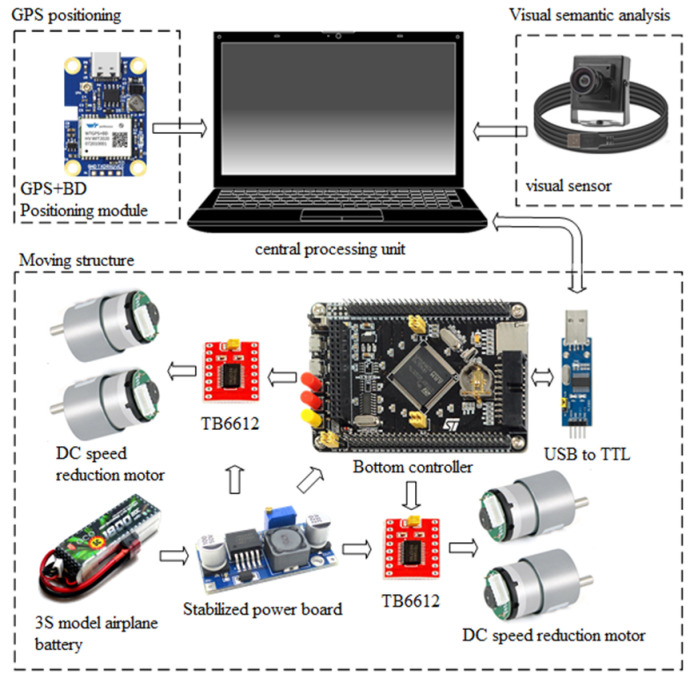 Figure 2
Figure 2 Figure 3
Figure 3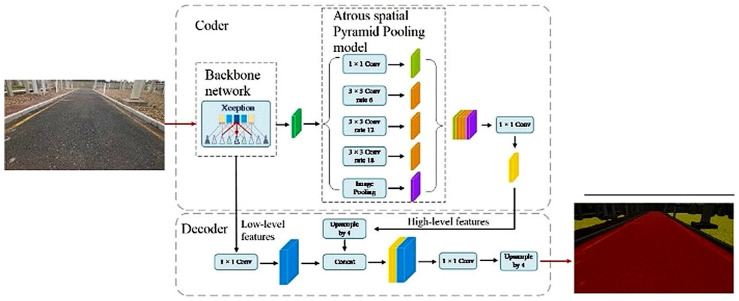 Figure 4
Figure 4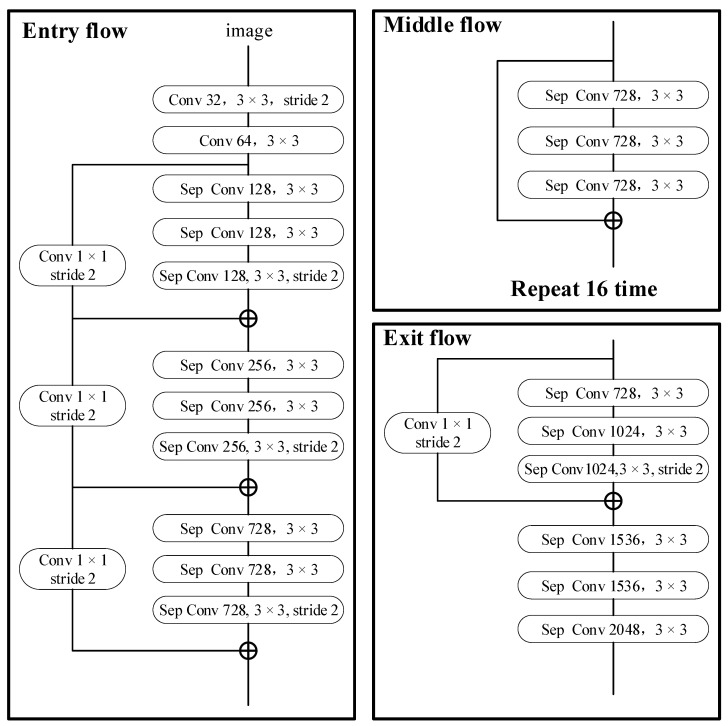 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Power Line Inspection Robots · Advanced Neural Network Applications