SMPPALD—Segmentation Mask Post-Processing Algorithm for Improved Lane Detection
Denis Vajak, Mario Vranješ, Ratko Grbić, Denis Vranješ

TL;DR
This paper introduces a new algorithm that improves lane detection in self-driving cars by refining neural network outputs.
Contribution
A novel post-processing algorithm for lane detection that improves accuracy using geometric and contextual rules.
Findings
SMPPALD improved F1 measure over SCNN on TuSimple and LLAMAS datasets.
The algorithm outperformed SCNN in most categories on the CULane dataset.
Abstract
As modern Advanced Driver Assistance Systems become increasingly prevalent in the automotive industry, Lane Detection (LD) solutions play a key role in enabling vehicles to drive autonomously or provide assistance to the driver. Many modern LD algorithms are based on neural networks, which estimate the locations of lane markings as segmentation masks in the input image. In this paper, we propose a novel algorithm, named SMPPALD (Segmentation Mask Post-Processing Algorithm for improved Lane Detection), designed to perform a set of post-processing operations on these segmentation masks to produce a list of points that define the lane markings. These operations follow geometric and contextual rules, taking into account the LD problem and improving detection accuracy. The algorithm was tested using the well-known and widely used Spatial Convolutional Neural Network (SCNN) on three different…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
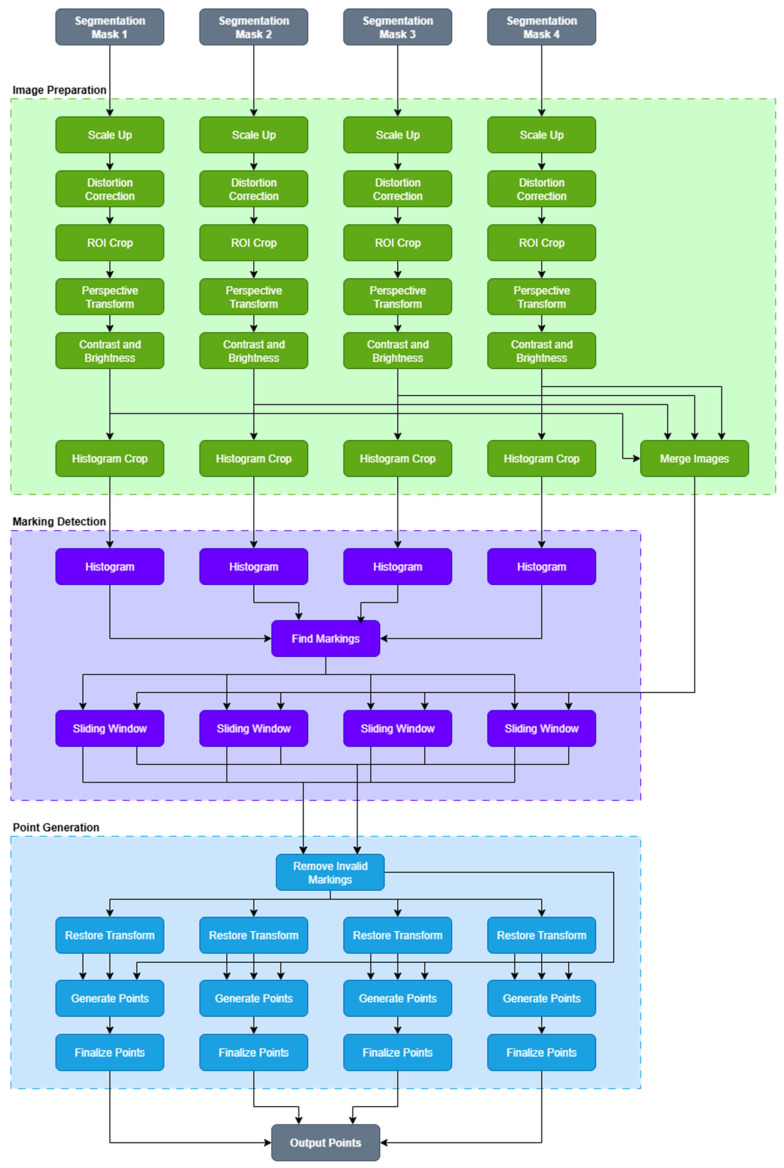 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6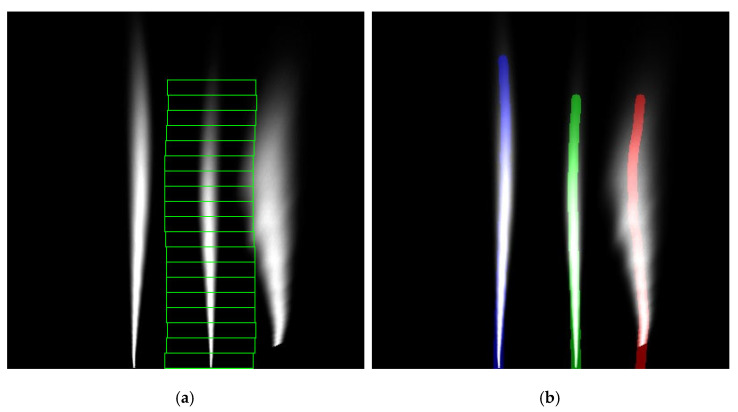 Figure 7
Figure 7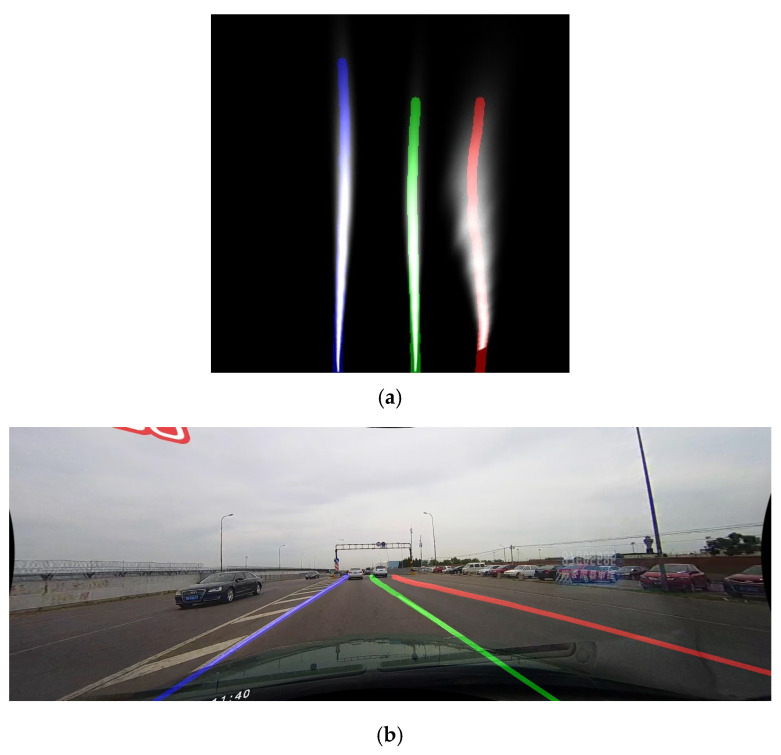 Figure 8
Figure 8 Figure 9
Figure 9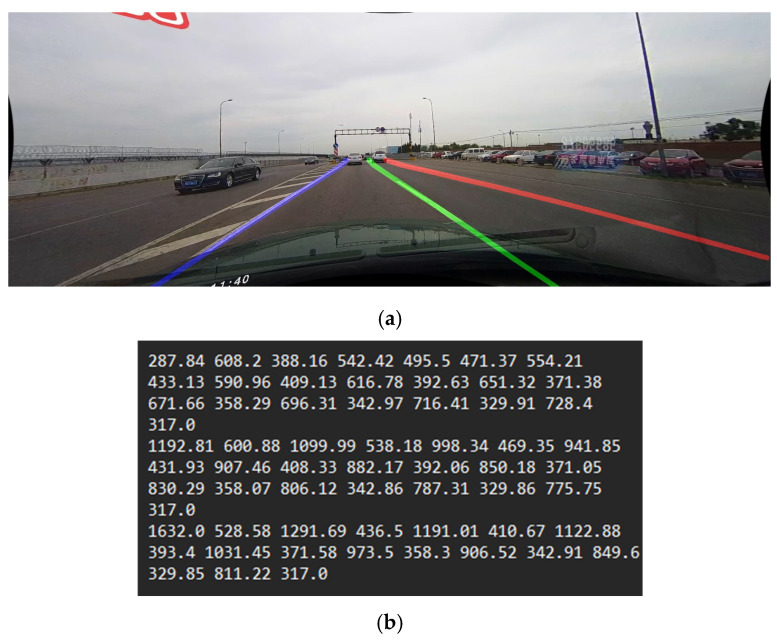 Figure 10
Figure 10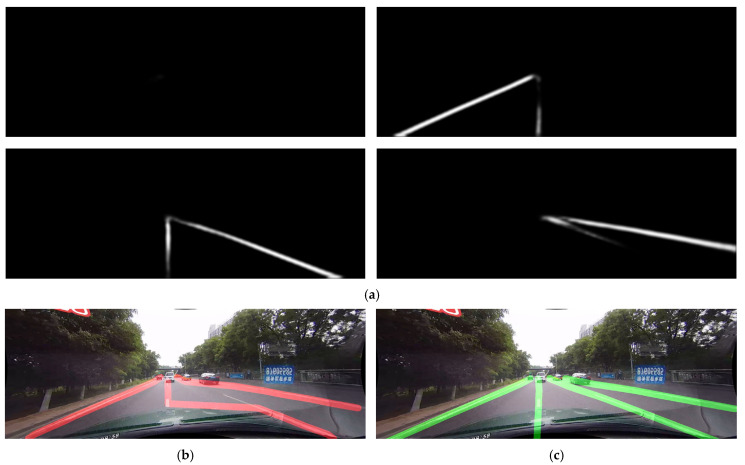 Figure 11
Figure 11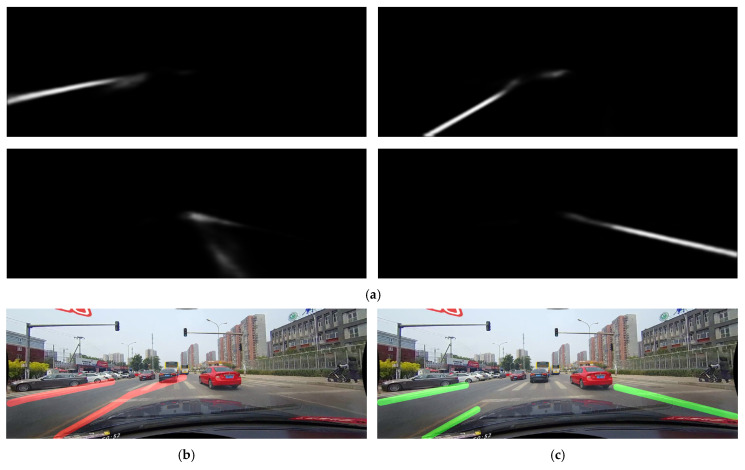 Figure 12
Figure 12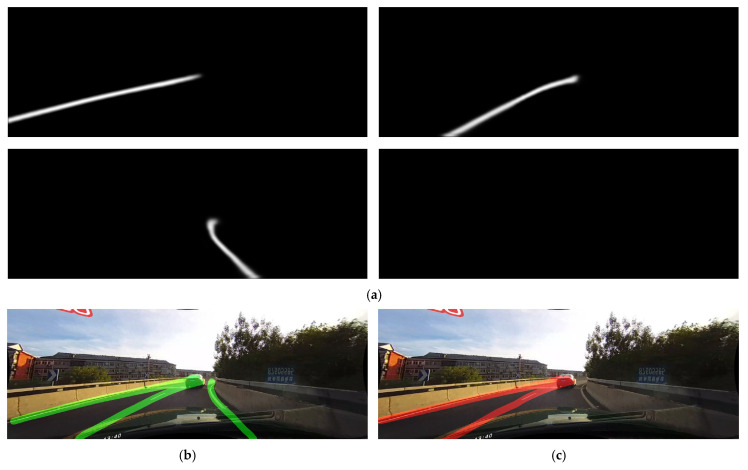 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAutonomous Vehicle Technology and Safety · Remote Sensing and LiDAR Applications · Advanced Neural Network Applications