Monocular Visual/IMU/GNSS Integration System Using Deep Learning-Based Optical Flow for Intelligent Vehicle Localization
Jeongmin Kang

TL;DR
This paper introduces a new system for vehicle localization that combines vision, IMU, and GNSS data using deep learning to improve accuracy in outdoor environments.
Contribution
A novel multi-sensor fusion system using deep learning-based optical flow with enhanced consistency constraints for robust vehicle localization.
Findings
The proposed system outperforms previous methods in localization accuracy on the KITTI dataset.
Enhanced consistency constraints improve optical flow reliability in low-texture regions.
Integration with GNSS reduces long-term drift and improves global stability.
Abstract
Accurate and reliable vehicle localization is essential for autonomous driving in complex outdoor environments. Traditional feature-based visual–inertial odometry (VIO) suffers from sparse features and sensitivity to illumination, limiting robustness in outdoor scenes. Deep learning-based optical flow offers dense and illumination-robust motion cues. However, existing methods rely on simple bidirectional consistency checks that yield unreliable flow in low-texture or ambiguous regions. Global navigation satellite system (GNSS) measurements can complement VIO, but often degrade in urban areas due to multipath interference. This paper proposes a multi-sensor fusion system that integrates monocular VIO with GNSS measurements to achieve robust and drift-free localization. The proposed approach employs a hybrid VIO framework that utilizes a deep learning-based optical flow network, with an…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
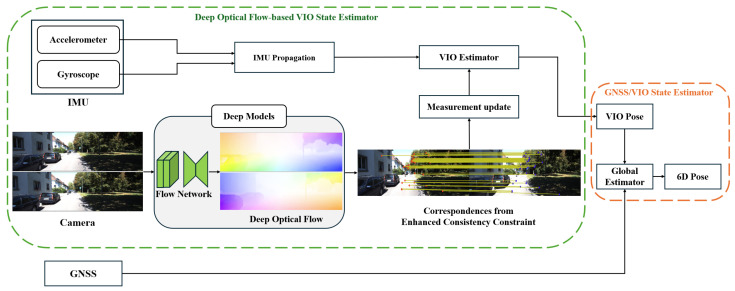 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3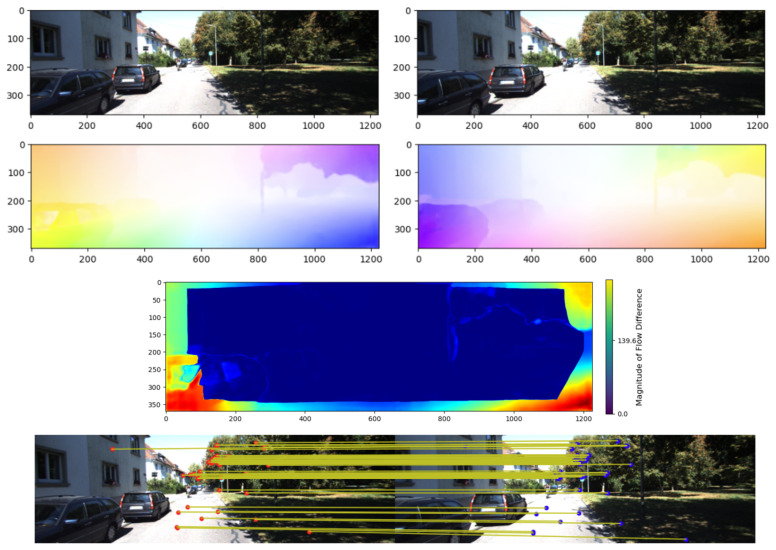 Figure 4
Figure 4 Figure 5
Figure 5Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Vision and Imaging · Indoor and Outdoor Localization Technologies