Leg compliance is required to explain the ground reaction force patterns and speed ranges in different gaits
Ali Tehrani Safa, Tirthabir Biswas, Arun Ramakrishnan, Vikas Bhandawat

TL;DR
The study shows that leg compliance is essential for explaining ground reaction forces and gait transitions in walking and running.
Contribution
The paper reveals that gait choice and walk-to-run transitions depend on leg compliance and force constraints, not just energy efficiency.
Findings
Humans and animals prefer M-shaped vertical ground reaction forces due to force constraints, not just energy.
Walk-to-run transition is driven by vGRF minimum, motion synchronization, and velocity redirection.
Abstract
Two simple models—vaulting over stiff legs and rebounding over compliant legs—are employed to describe the mechanics of legged locomotion. It is agreed that compliant legs are necessary for describing running, and that leg compliance is also present during walking. Stiff legs continue to be employed to model walking under the assumption that the compliance of the leg during walking is low enough to be considered stiff. Here we study gait choice and walk-to-run transition in a biped with compliance and show that the principles underlying gait choice and transition are completely different from stiff legs. Two findings underpin our conclusions: First, at the same speed, step length and stance duration, multiple gaits that differ in the number of times the leg expands and contracts during a single stance are possible. Among them, humans and other animals choose the (normal) gait with…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
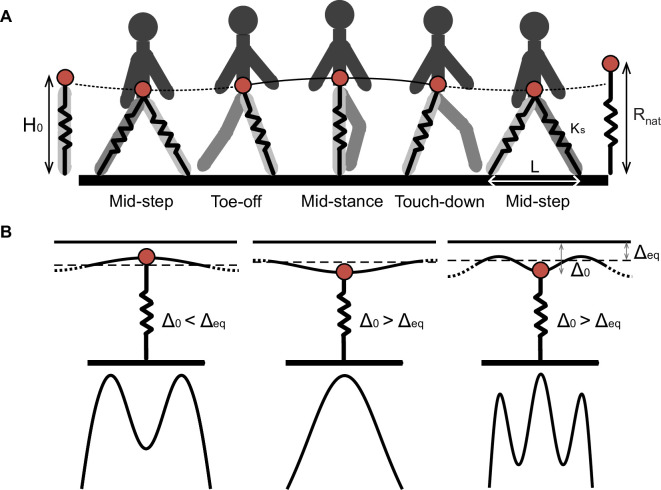 Figure 1
Figure 1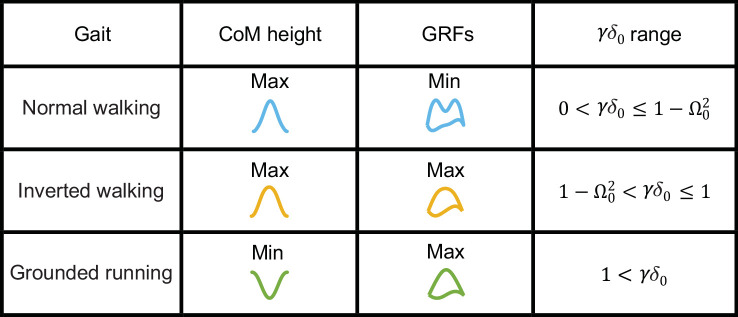 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4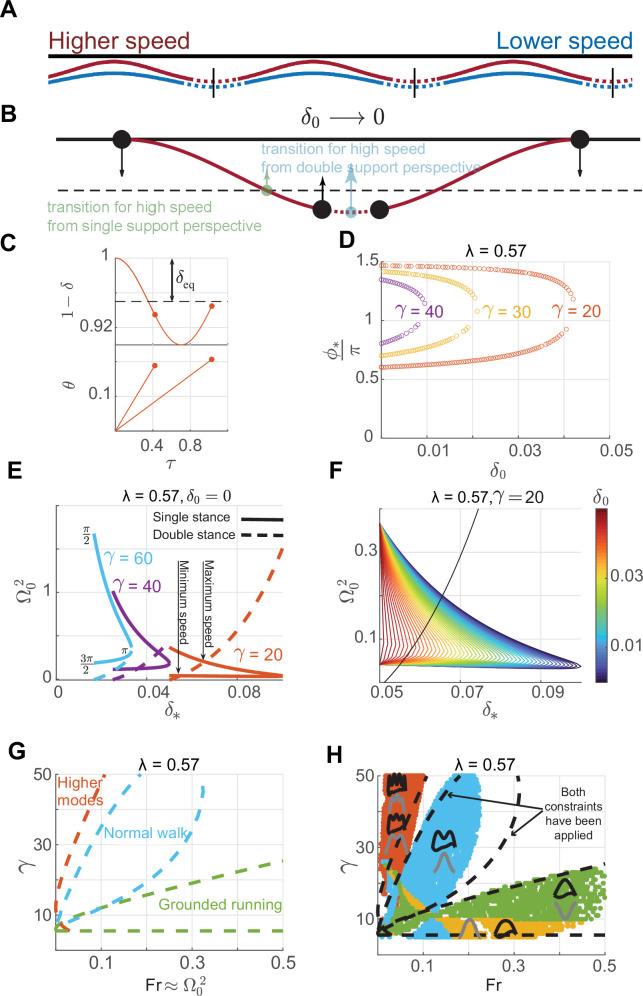 Figure 5
Figure 5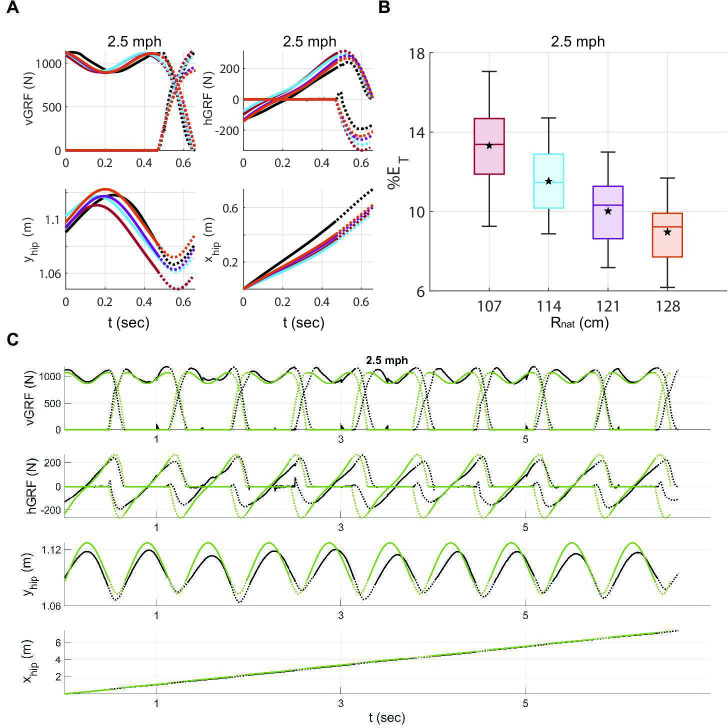 Figure 6
Figure 6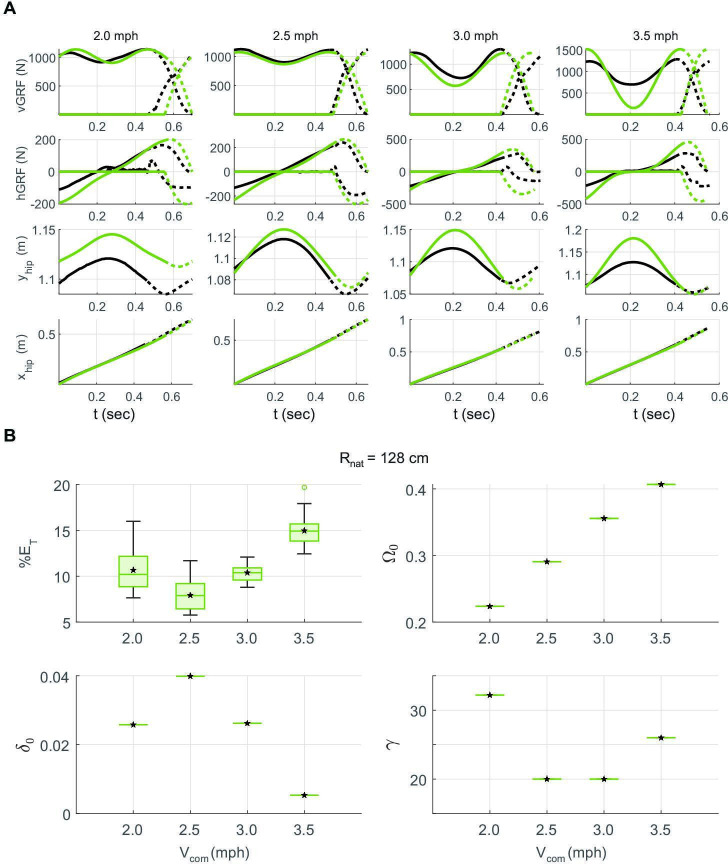 Figure 7
Figure 7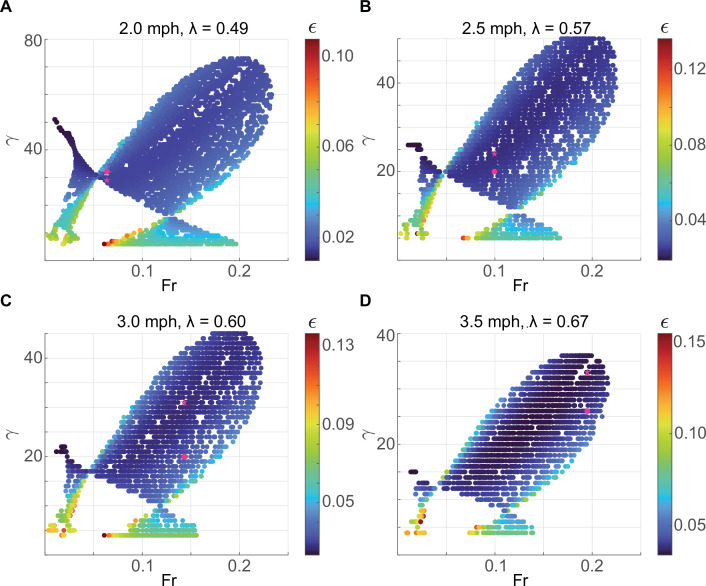 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Biomimetic flight and propulsion mechanisms · Muscle activation and electromyography studies