The navigation for home service robot with the least power consumption
Yupei Yan

TL;DR
This paper presents a new navigation system for home robots that uses the least amount of power by optimizing localization, path planning, and obstacle avoidance.
Contribution
The paper introduces five novel methods to reduce power consumption in robot navigation, including optimized localization and path planning techniques.
Findings
Straight paths and in-place rotations consume less power than curved paths.
Machine learning improves angle localization with minimal power use.
The proposed algorithm outperforms DWA and TEB in power efficiency during navigation.
Abstract
This paper discusses the navigation of the home service robot with least power consumption. Firstly, the localization of position of the robot with least power consumption is analyzed based on the geometrical relationship between robot and home appliance, then the localization of angle of the robot in the indoor environment with least power is proposed, which can be predicted by machine learning algorithms. Following, the path planning of the robot with least power is proposed, two supplements and optimizations of previous algorithms are proposed, the power consumption on the moving path is calculated according to the law of energy conservation, the conclusion is obtained that moving straight path and rotating in place will save more power than moving curve path. Then, the obstacle avoidance of the robot in the dynamic environment with least power consumption is proposed, the navigation…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 10
Figure 10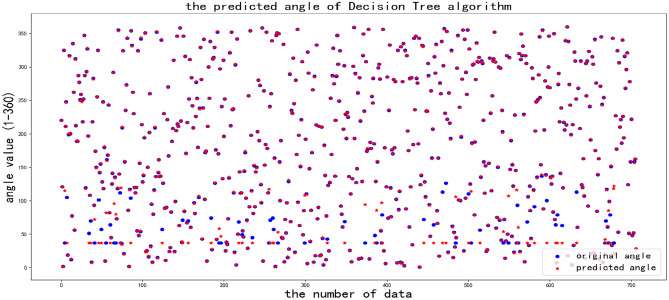 Figure 11
Figure 11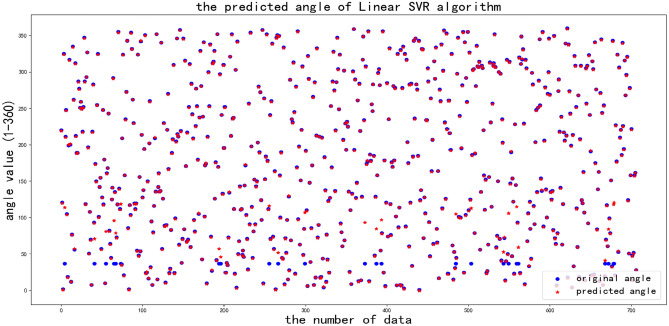 Figure 12
Figure 12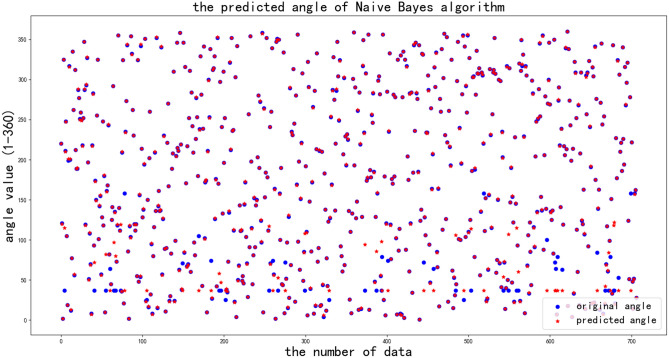 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17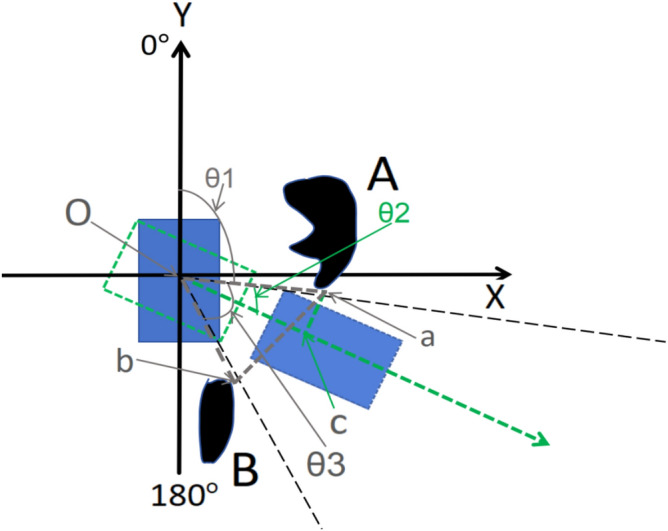 Figure 18
Figure 18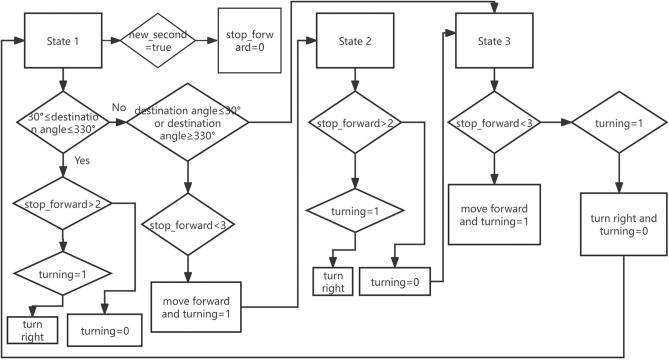 Figure 19
Figure 19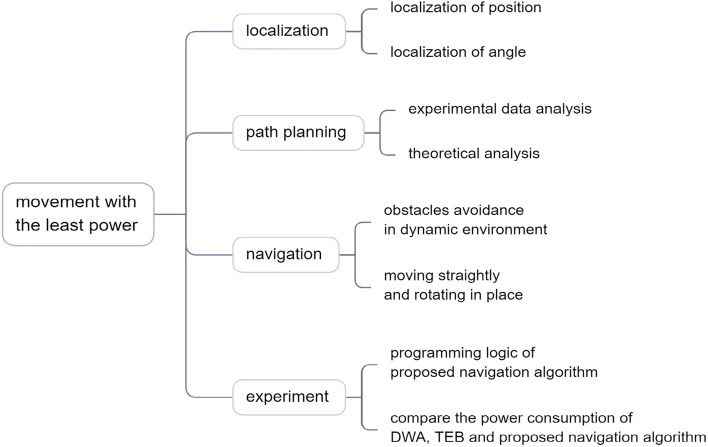 Figure 1
Figure 1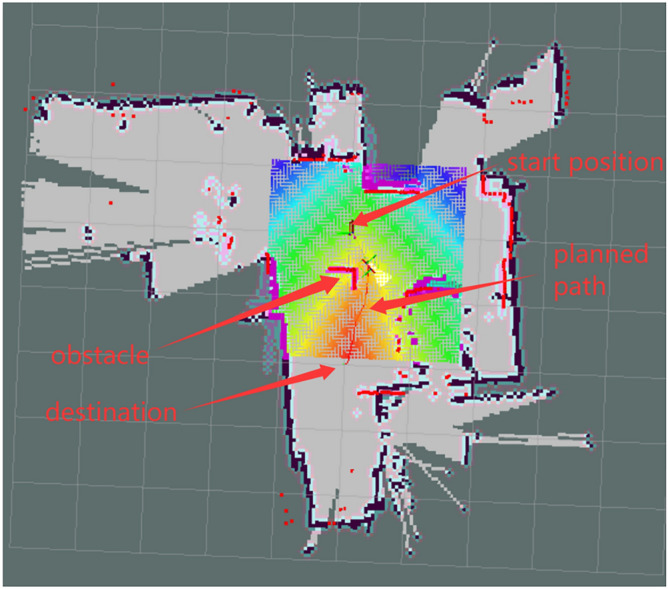 Figure 20
Figure 20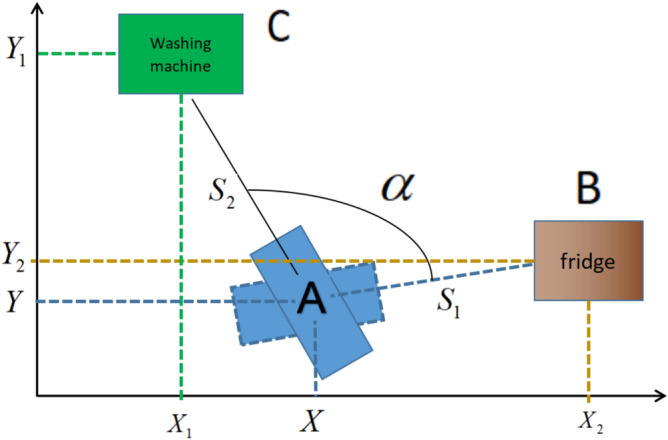 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5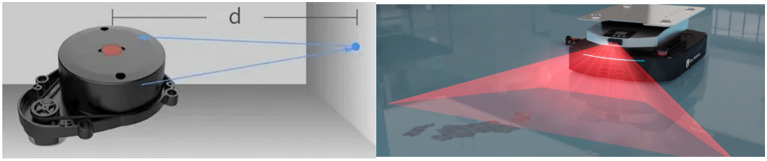 Figure 6
Figure 6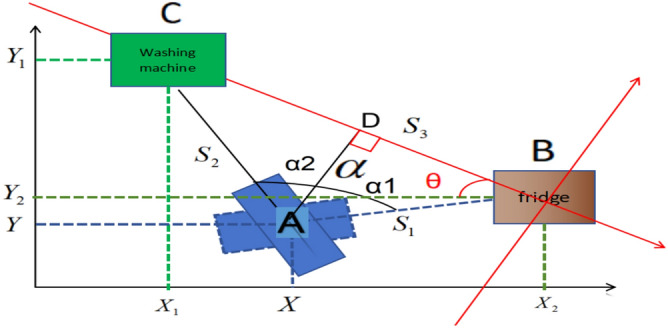 Figure 7
Figure 7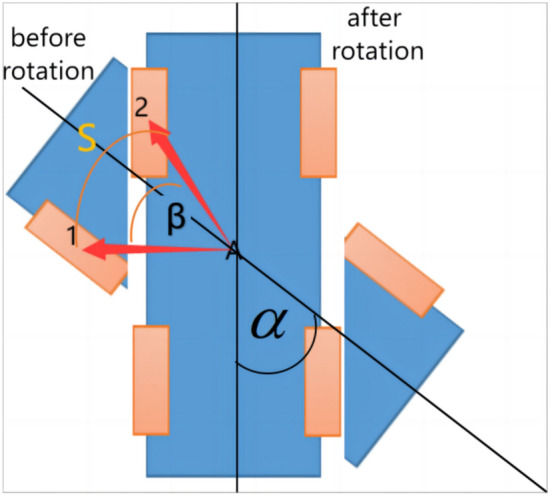 Figure 8
Figure 8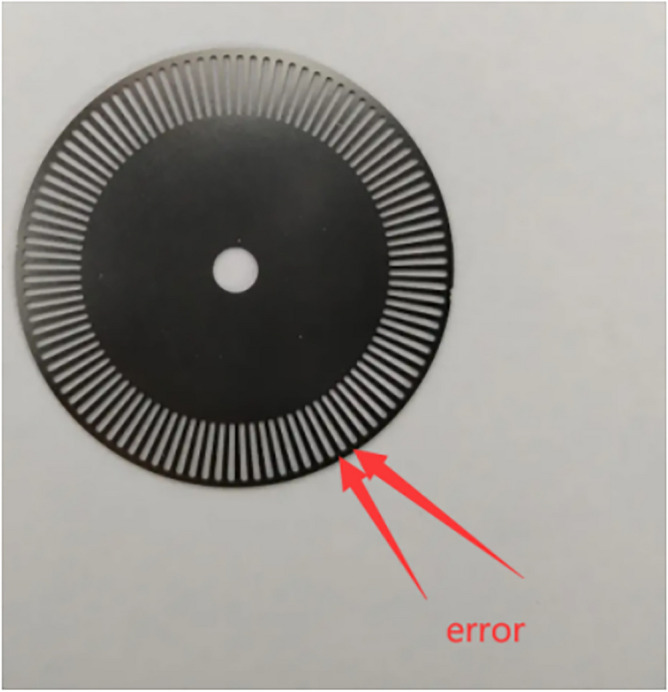 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Robotics and Sensor-Based Localization · Control and Dynamics of Mobile Robots