Monocular suture needle pose detection using synthetic data augmented convolutional neural network
Yifan Wang, Saul Alexis Heredia Perez, Kanako Harada

TL;DR
This paper introduces a CNN-based method using synthetic data to estimate the position and orientation of a suture needle in robotic microsurgery under monocular vision.
Contribution
A novel CNN-based approach that combines synthetic and real data to estimate suture needle pose in monocular images.
Findings
The method achieved average translation errors of 0.107 mm, 0.118 mm, and 0.098 mm for key points in synthetic data.
On real data, the method showed average 2D translation errors of 0.047 mm, 0.052 mm, and 0.049 mm for key points.
93.85% of detected keypoints had errors below 4 pixels in real-world evaluations.
Abstract
Robotic microsurgery enhances the dexterity and stability of the surgeon to perform precise and delicate surgical procedures at microscopic level. Accurate needle pose estimation is critical for robotic micro-suturing, enabling optimized insertion trajectories and facilitating autonomous control. However, accurately estimating the pose of a needle during manipulation, particularly under monocular vision, remains a challenge. This study proposes a convolutional neural network-based method to estimate the pose of a suture needle from monocular images. The 3D pose of the needle is estimated using keypoints information from 2D images. A convolutional neural network was trained to estimate the positions of keypoints on the needle, specifically the tip, middle and end point. A hybrid dataset comprising images from both real-world and synthetic simulated environments was developed to train…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
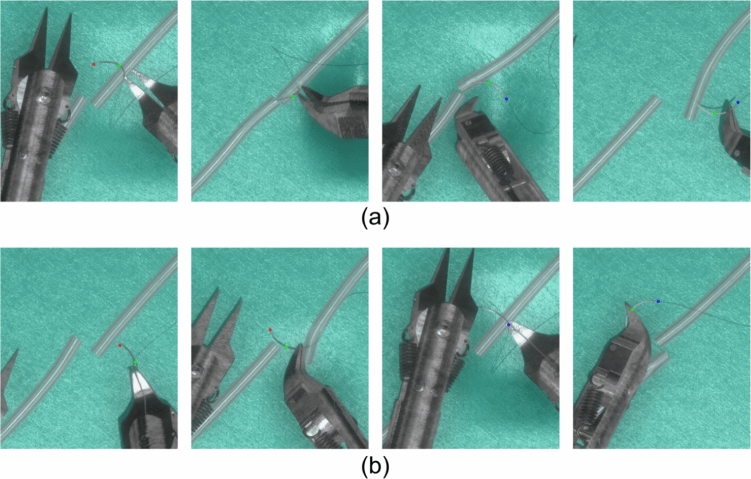 Figure 10
Figure 10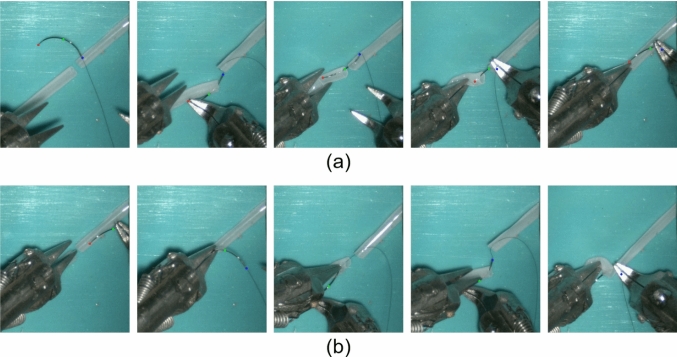 Figure 11
Figure 11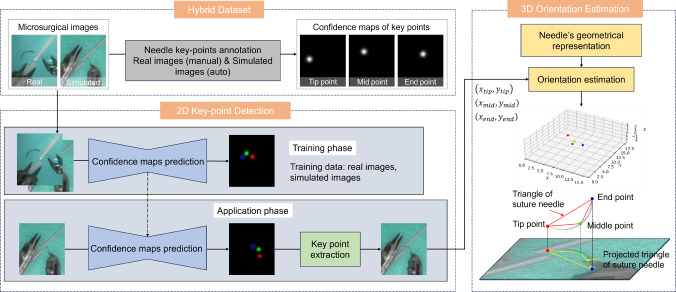 Figure 1
Figure 1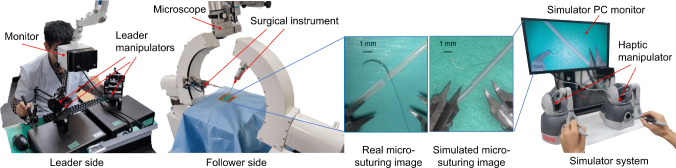 Figure 2
Figure 2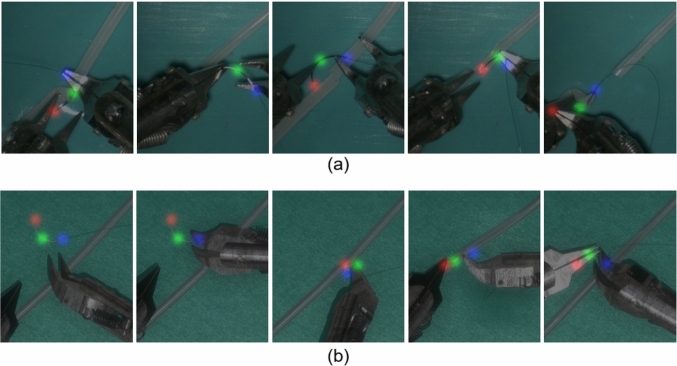 Figure 3
Figure 3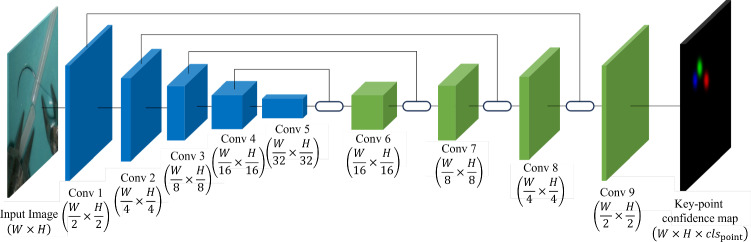 Figure 4
Figure 4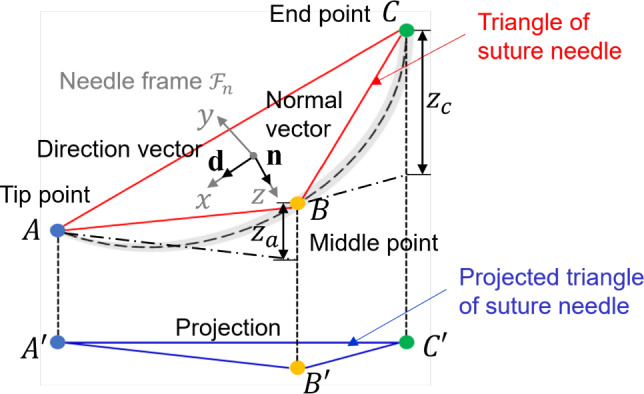 Figure 5
Figure 5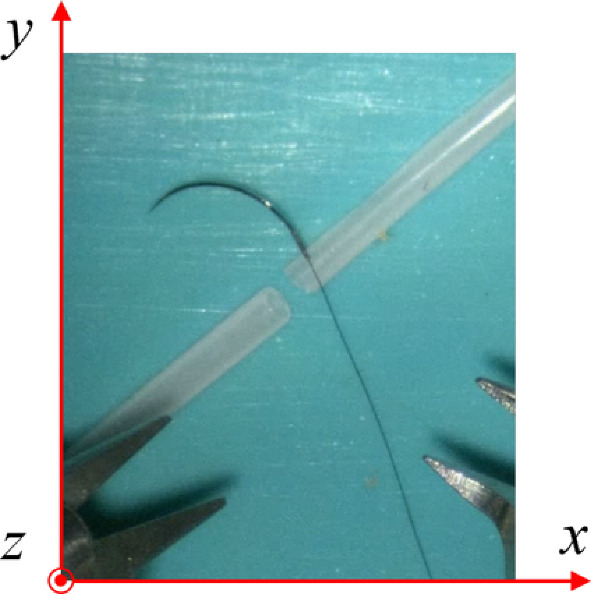 Figure 6
Figure 6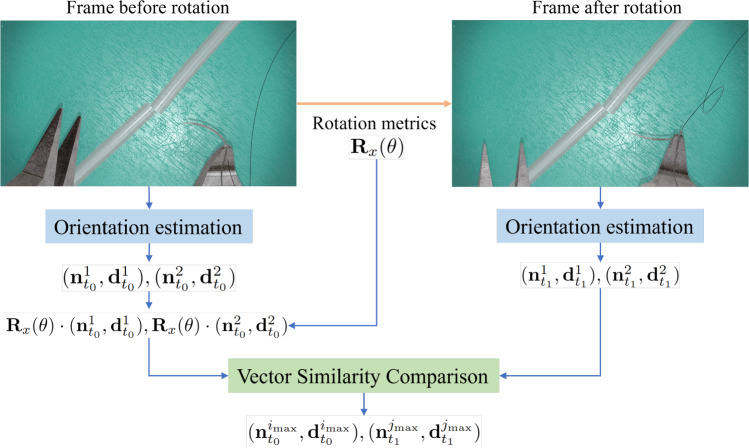 Figure 7
Figure 7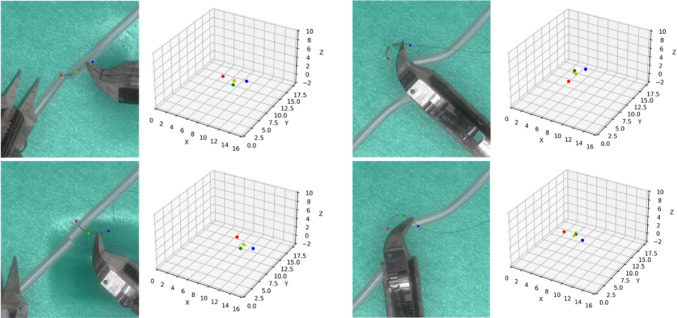 Figure 8
Figure 8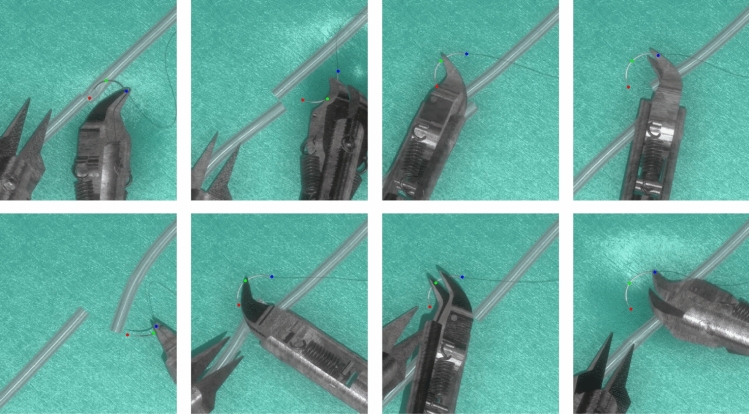 Figure 9
Figure 9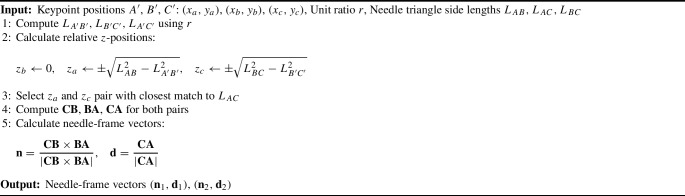 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Surgical Simulation and Training · Dental Radiography and Imaging