Let’s DENSE: a novel protocol for efficiently collecting dense and diverse data for tactile slip detection in robotic grasping
Rodrigo Zenha, Brice Denoun, Andrea Cavallaro, Alexandre Bernardino, Lorenzo Jamone

TL;DR
This paper introduces DENSE, a new protocol for efficiently collecting diverse tactile data to improve robotic slip detection during grasping.
Contribution
DENSE is a novel, efficient, and reproducible data collection protocol for tactile slip detection in robotic grasping.
Findings
DENSE reduces data collection time by up to 50% compared to baseline methods.
Models trained with DENSE data generalize better, showing up to 85% improvement in unseen interactions.
Abstract
There is a growing interest in leveraging tactile sensing and data-driven models to enable robust robotic grasping; in this context, detecting object slip is a fundamental skill. However, the large variability in gripper-object interactions (e.g. different grasp poses, area of contact with the sensor, and directions of slip) makes the collection of suitable data to train models costly in time and resources, and current data collection protocols are oversimplified to several repetitions on a small subset of gripper-object interactions. To address this challenge, we propose DENSE, an efficient and highly reproducible protocol which is designed to capture this large variability by exploring gripper-object interactions across the object surface, and which automatically embeds straightforward labelling. We show experimentally that, compared to baseline methods, the DENSE protocol can reduce…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
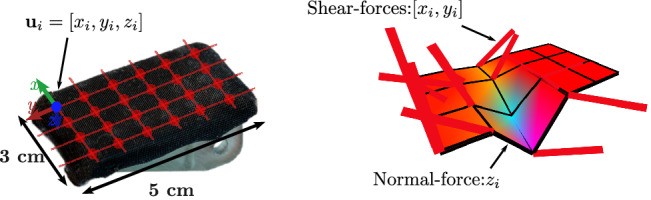 Figure 10
Figure 10 Figure 11
Figure 11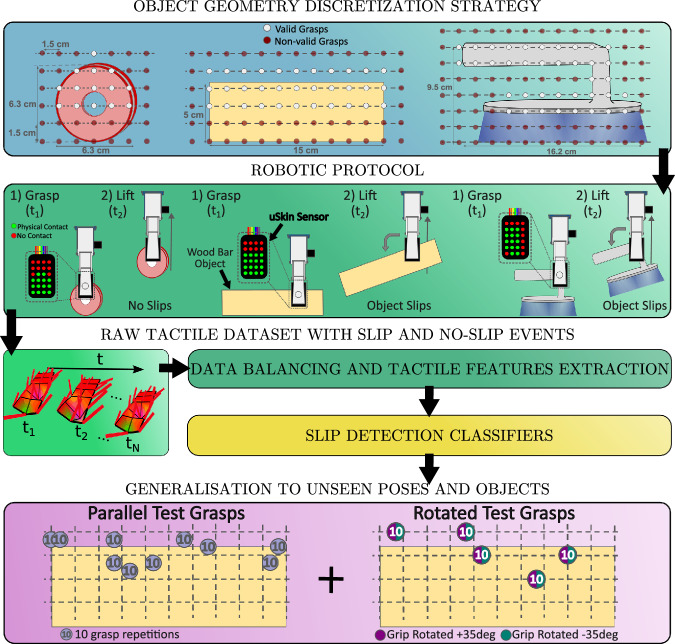 Figure 1
Figure 1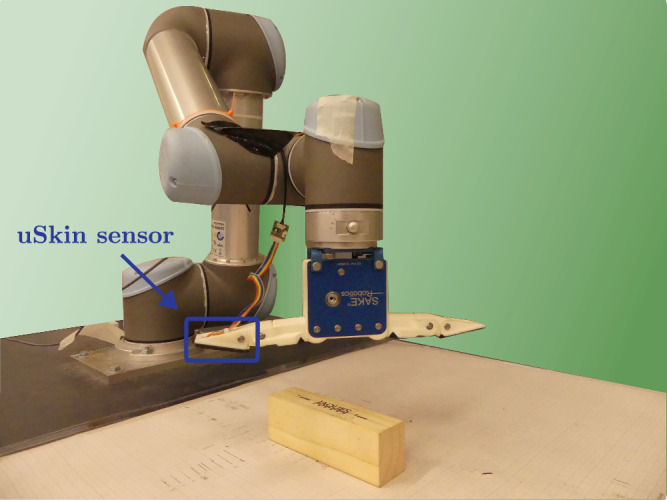 Figure 2
Figure 2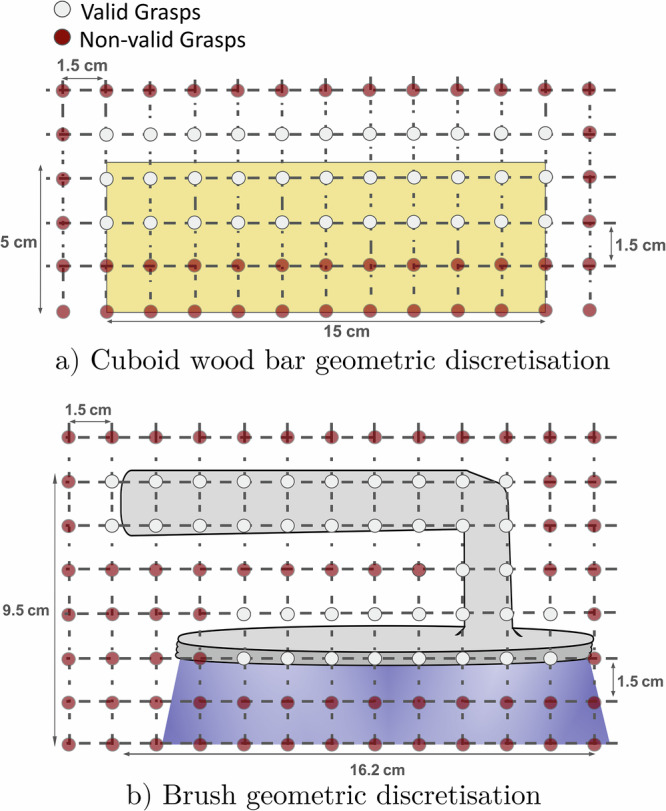 Figure 3
Figure 3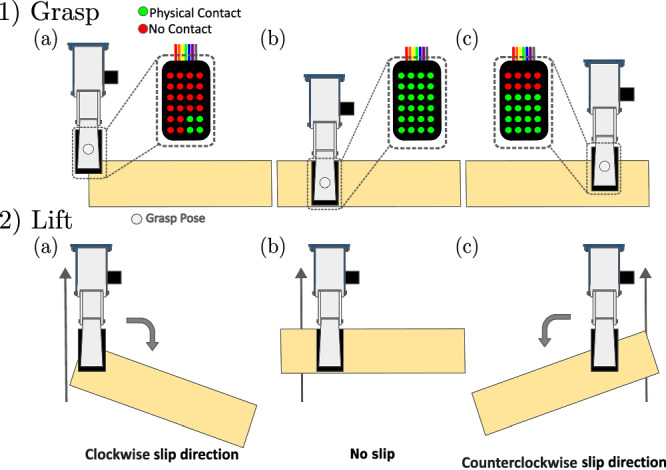 Figure 4
Figure 4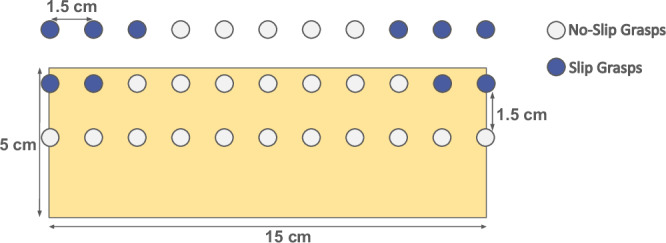 Figure 5
Figure 5 Figure 6
Figure 6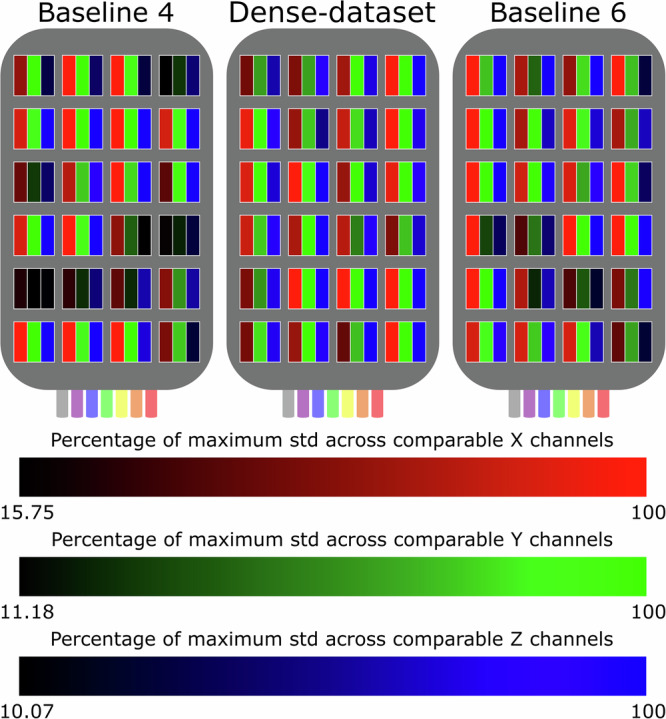 Figure 7
Figure 7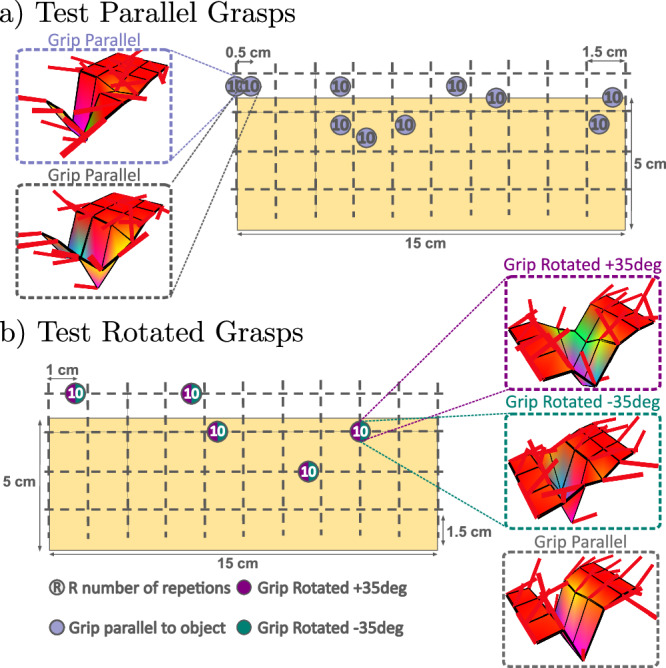 Figure 8
Figure 8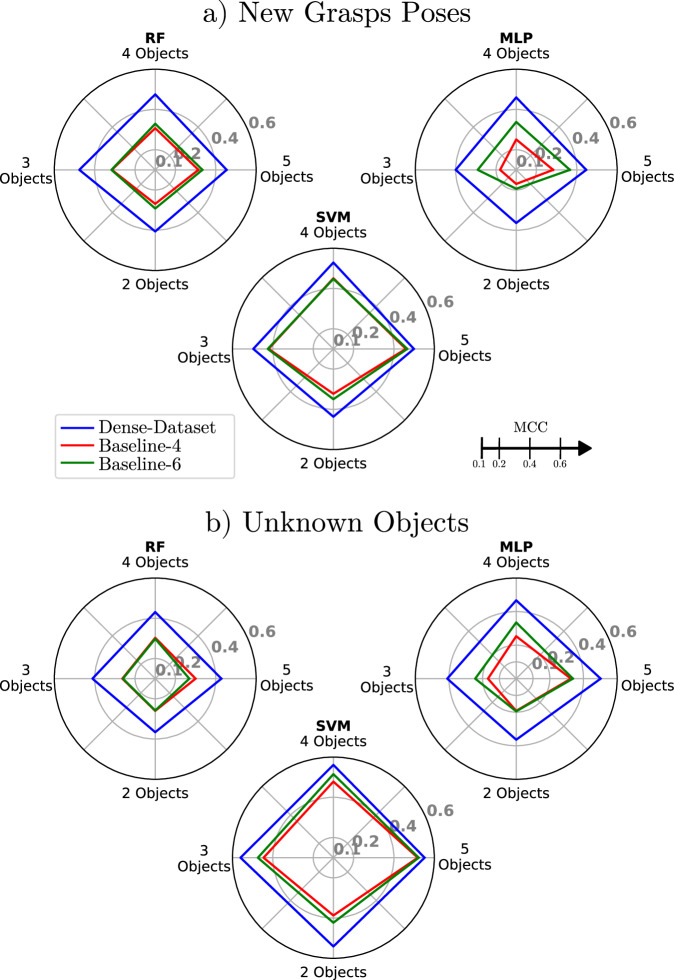 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Tactile and Sensory Interactions · Advanced Sensor and Energy Harvesting Materials