Autonomous navigation of quadrupeds using coverage path planning with morphological skeleton maps
Alexander James Becoy, Kseniia Khomenko, Luka Peternel, Raj Thilak Rajan

TL;DR
This paper introduces a new method for quadruped robots to autonomously navigate and scan unstructured environments using morphological skeleton maps and path planning.
Contribution
The novel use of morphological skeleton maps for coverage path planning in quadruped navigation is introduced.
Findings
The method achieved 86.5% waypoint reachability in five trials.
The map reader and path planner processed maps in 2.52 ms and 1.7 ms, respectively.
Drift in the 2D navigation map was identified as a limitation of the method.
Abstract
This article proposes a novel method of coverage path planning for the purpose of scanning an unstructured environment autonomously. The method uses the morphological skeleton of a prior 2D navigation map via SLAM to generate a sequence of points of interest (POIs). This sequence is then ordered to create an optimal path based on the robot’s current position. To control the high-level operation, a finite state machine (FSM) is used to switch between two modes: navigating toward a POI using Nav2 and scanning the local surroundings. We validate the method in a leveled, indoor, obstacle-free, non-convex environment, evaluating time efficiency and reachability over five trials. The map reader and path planner can quickly process maps of widths and heights ranging between [196,225] pixels and [185,231] pixels in 2.52 ms and 1.7 ms , respectively. Their computation time increases with…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3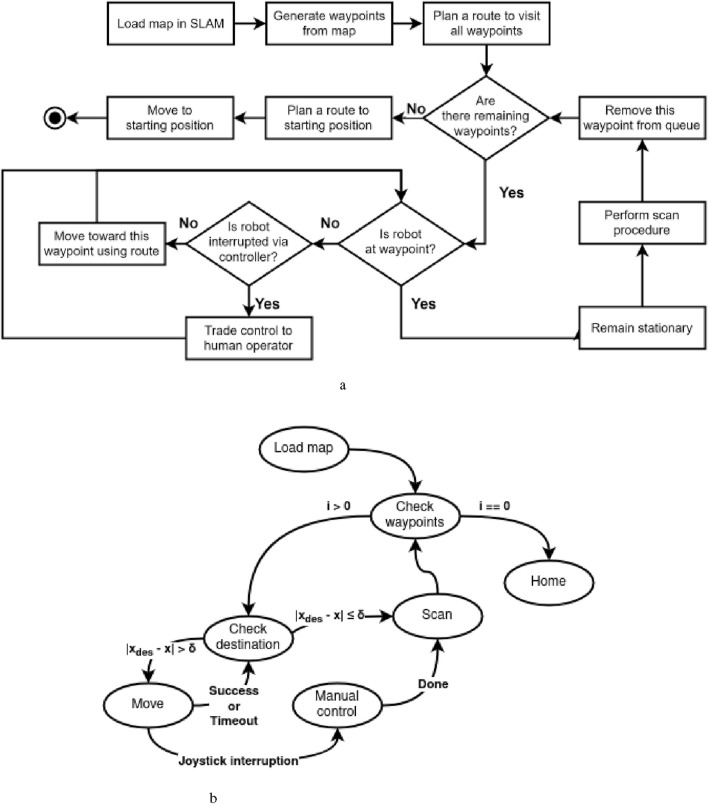 Figure 4
Figure 4 Figure 5
Figure 5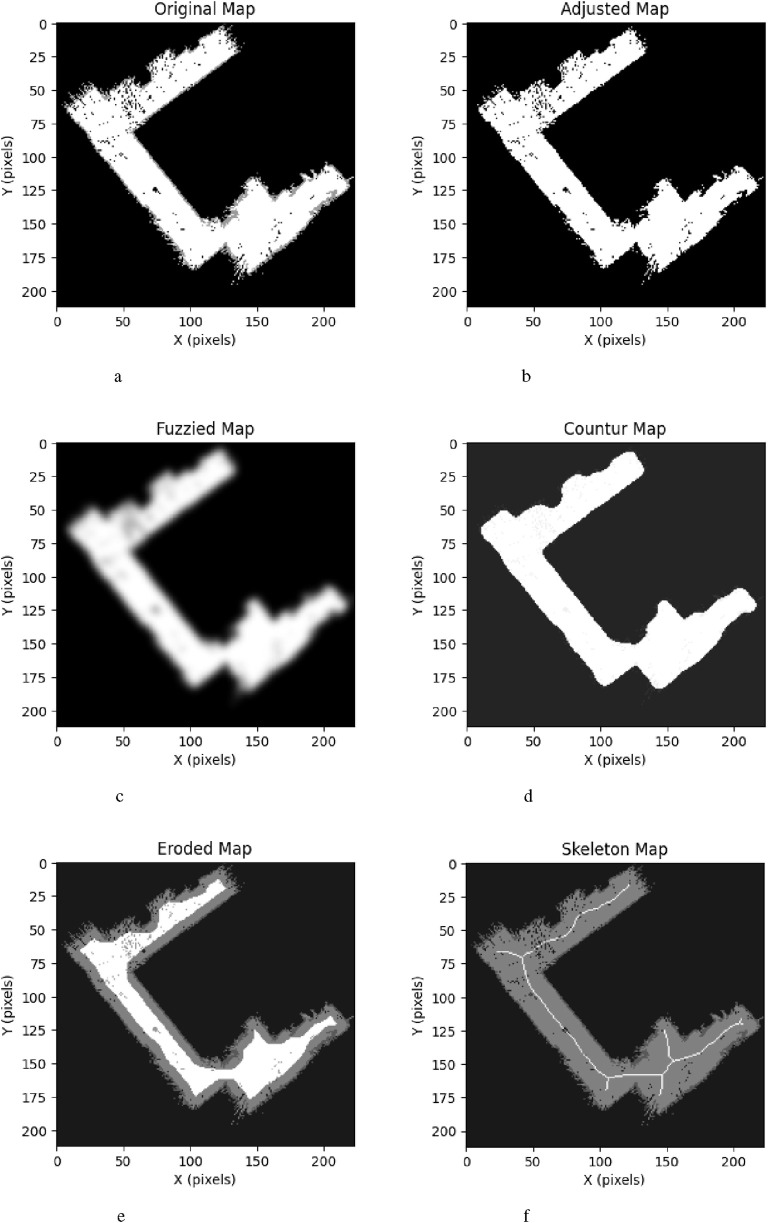 Figure 6
Figure 6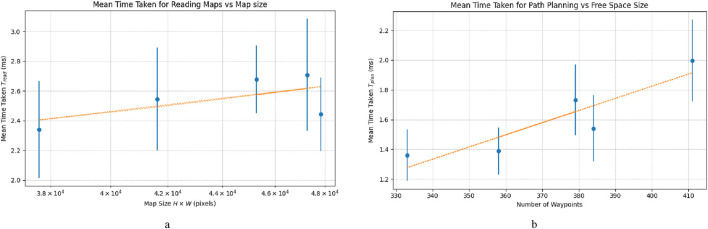 Figure 7
Figure 7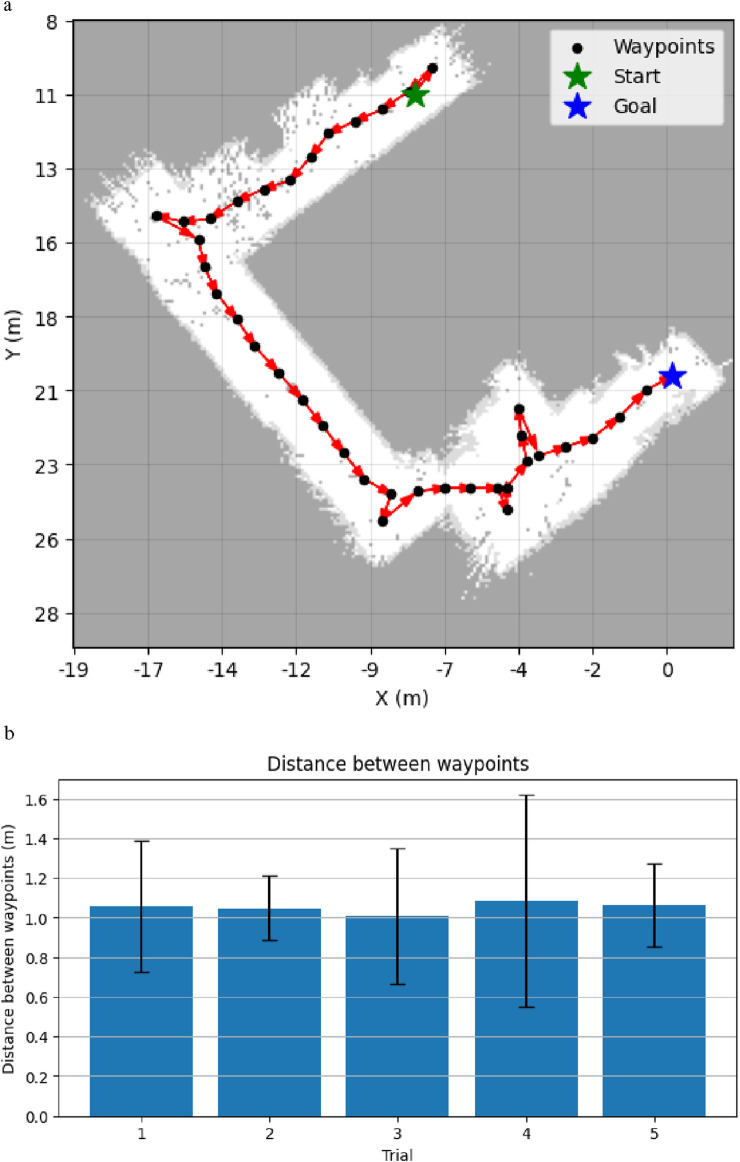 Figure 8
Figure 8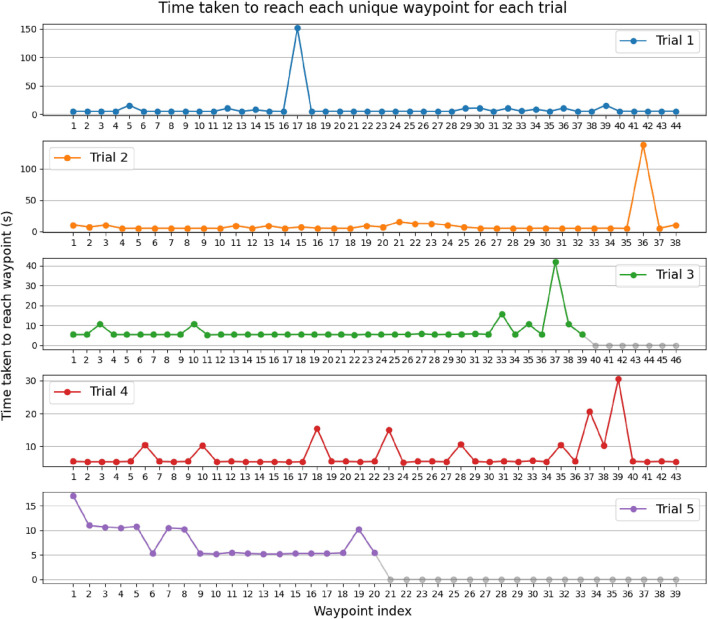 Figure 9
Figure 9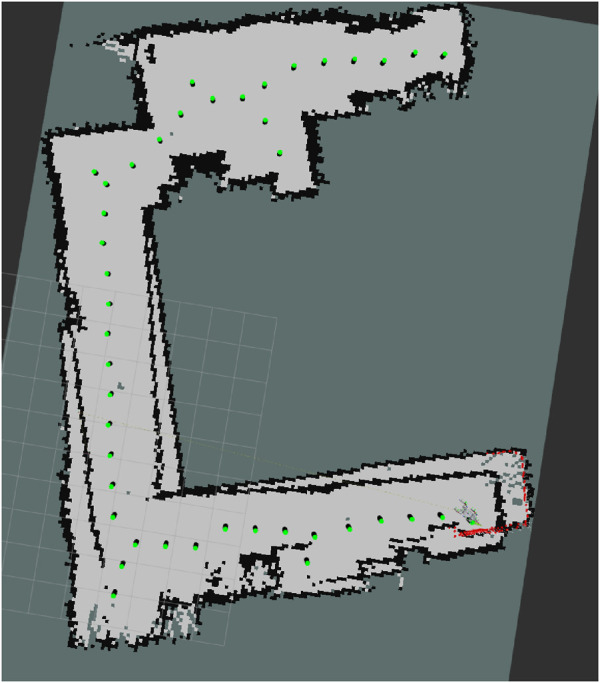 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Robotic Path Planning Algorithms · Modular Robots and Swarm Intelligence