Burrowing and unburrowing in submerged granular media through fluidization and shape-change
Aniruddha Nayak, Hoseung Seo, Nick Gravish, Michael T. Tolley

TL;DR
This paper presents a robotic system that can burrow into and unburrow from submerged granular media using fluidization and shape-change mechanisms, inspired by natural systems.
Contribution
The novel contribution is a robotic system combining water-jet fluidization for burrowing and a soft bladder for unburrowing in submerged granular media.
Findings
Water-jet fluidization significantly reduces drag, enabling efficient burrowing into submerged granular media.
A soft, inflatable bladder mechanism effectively unburrows the robot at various depths.
Pneumatic and hydraulic systems show trade-offs in unburrowing speed and operational time.
Abstract
Subterranean exploration in submerged granular media (GM) presents significant challenges for robotic systems due to high drag forces and the complex physics of GM. This paper introduces a robotic system that combines water-jet-based fluidization for self-burrowing in submerged environments and an untethered, volume-change mechanism for burrowing out. The water-based fluidization approach significantly reduces drag on the robot, allowing it to burrow into GM with minimal force. To burrow out, the robot uses a soft, inflatable bladder that undergoes periodic radial expansion, inspired by natural systems such as razor clams. Experimental results demonstrate that increased water flow rates accelerate the burrowing process, while the unburrowing mechanism is effective at varying depths. Comparisons between pneumatic and hydraulic untethered systems highlight trade-offs in terms of…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
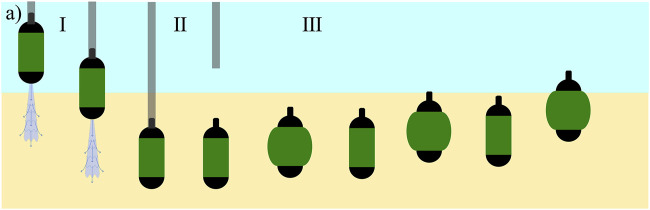 Figure 1
Figure 1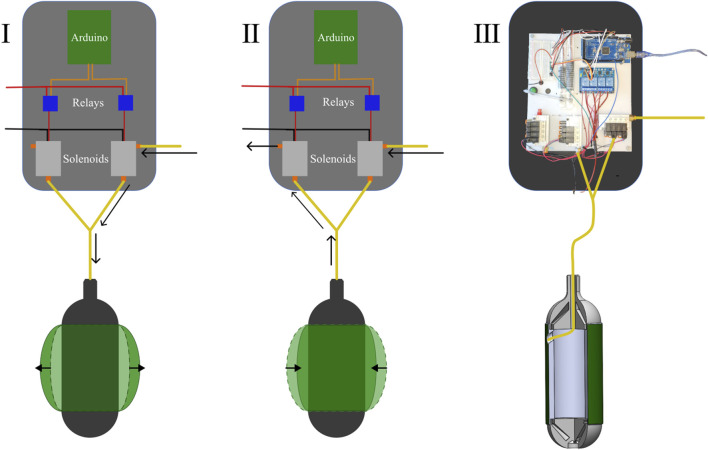 Figure 2
Figure 2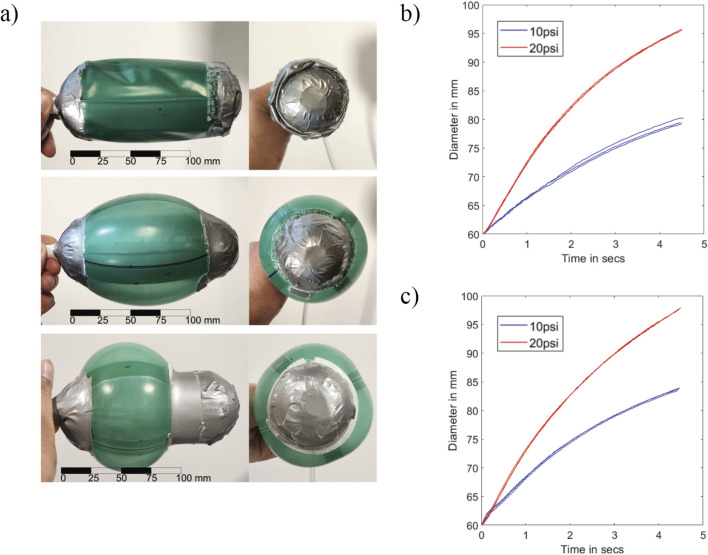 Figure 3
Figure 3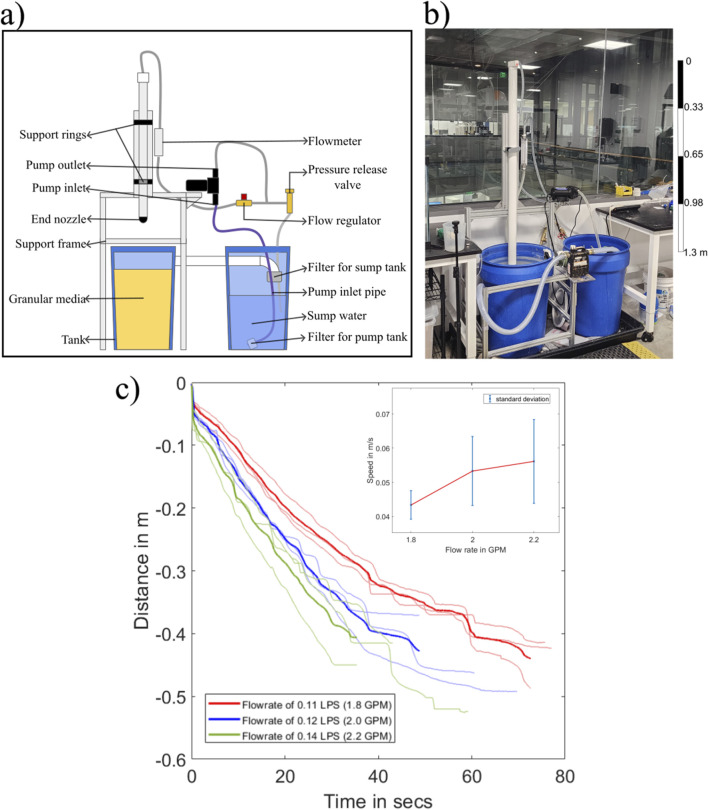 Figure 4
Figure 4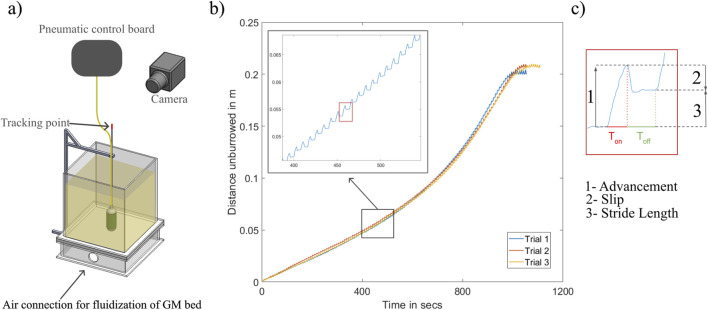 Figure 5
Figure 5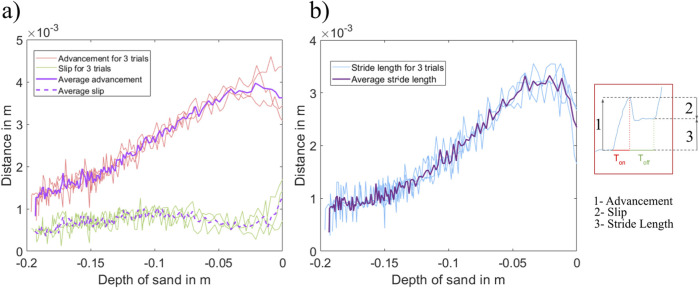 Figure 6
Figure 6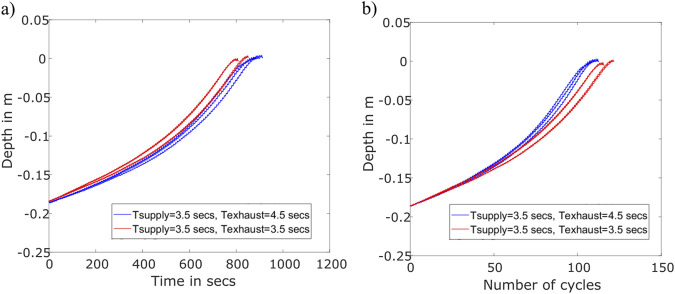 Figure 7
Figure 7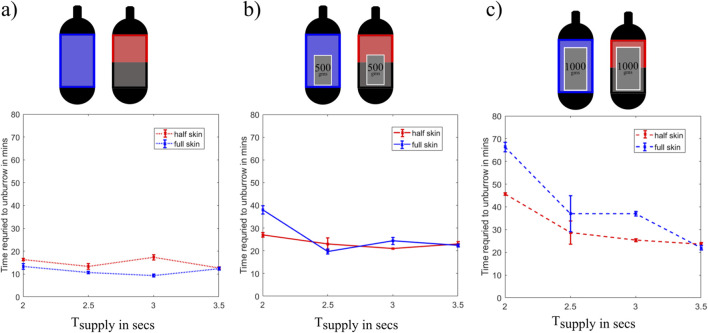 Figure 8
Figure 8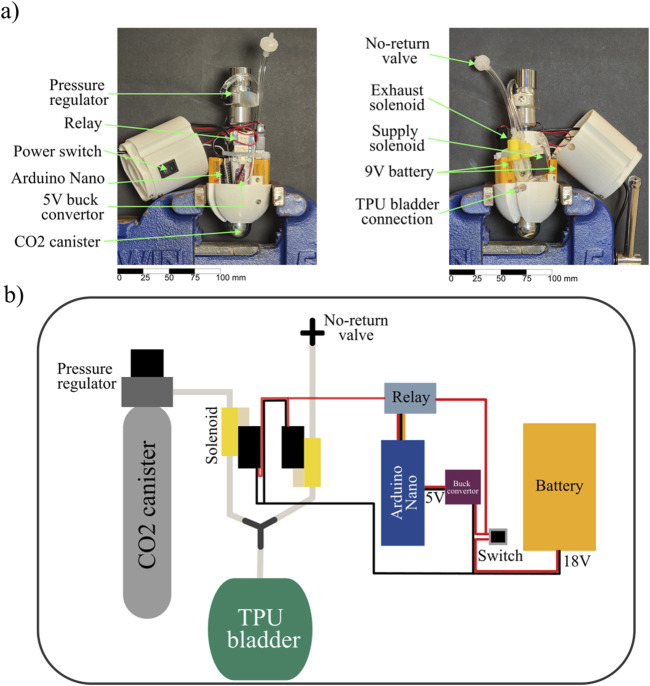 Figure 9
Figure 9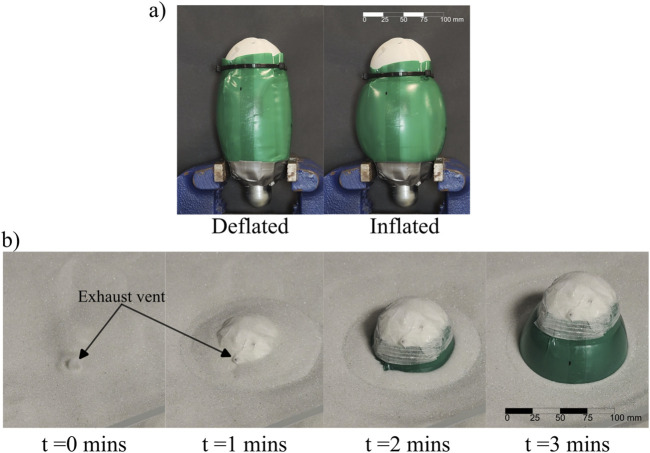 Figure 10
Figure 10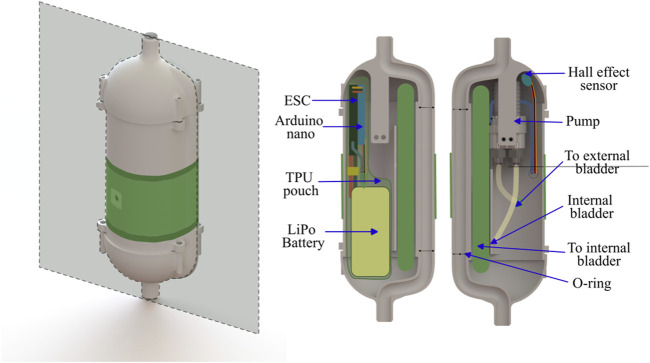 Figure 11
Figure 11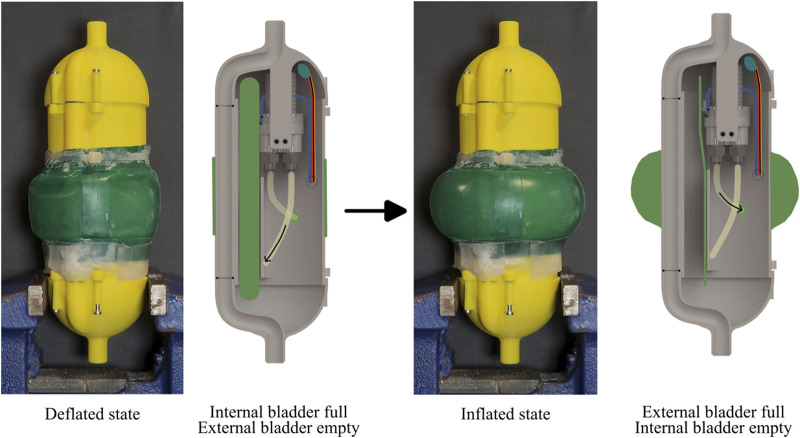 Figure 12
Figure 12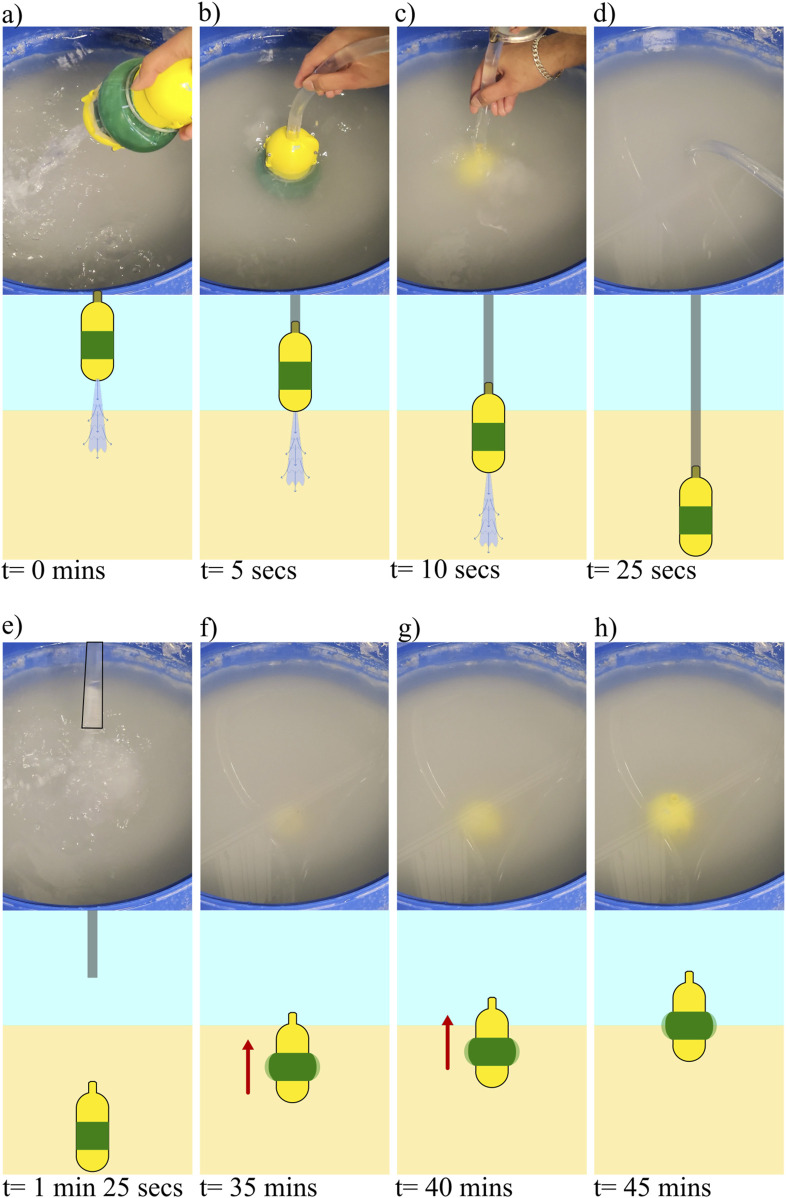 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Modular Robots and Swarm Intelligence · Underwater Vehicles and Communication Systems