Multi-layer robotic controller for enhancing the safety of mobile robot navigation in human-centered indoor environments
Karameldeen Omer, Andrea Monteriù

TL;DR
This paper introduces a three-layer robotic navigation system to improve safety and reduce costs in human-filled indoor spaces.
Contribution
A novel three-tiered robotic control system that integrates human input, virtual barriers, and semantic data for safer and more efficient navigation.
Findings
The system uses a human-in-the-loop approach to detect and avoid dangers in real time.
Dynamic virtual barriers prevent robot access to hazardous zones during specific times.
Semantic data from BIM models enables efficient path planning without real-time sensor mapping.
Abstract
This research proposes a multi-layer navigation system for indoor mobile robots when they share space with vulnerable individuals. The primary objectives are increasing or maintaining safety measures and curtailing operational costs, emphasizing reducing reliance on intricate sensor technologies and computational resources. The developed system employs a three-tiered control approach, with each layer playing a pivotal role in the navigation process. The “online” control layer integrates a human-in-the-loop strategy, where the human operator detects missing obstacles or approaching danger through a user interface and sends a trigger to the robot’s controller. This trigger enables the system to estimate the coordinates of the danger and update the robot’s navigation path in real time, minimizing reliance on complex sensor systems. The “semi-online” control layer generates dynamic virtual…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
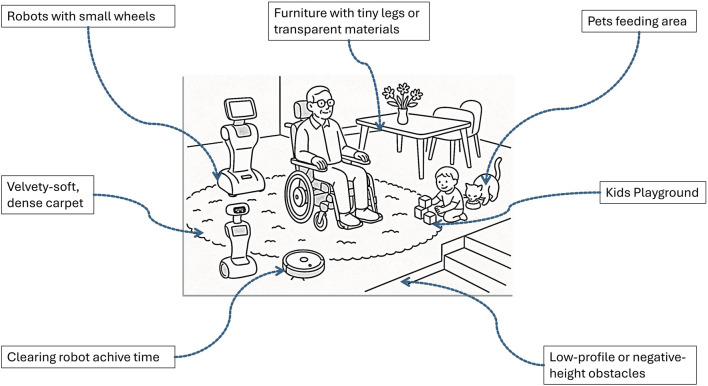 Figure 1
Figure 1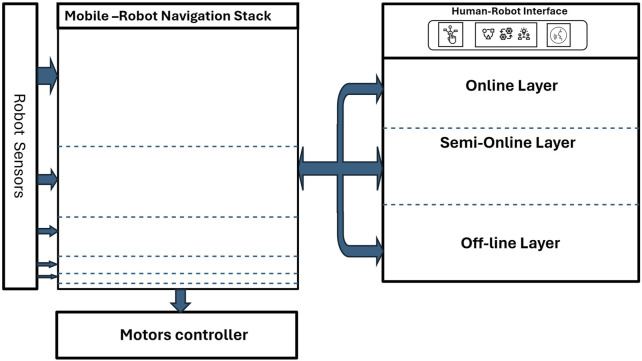 Figure 2
Figure 2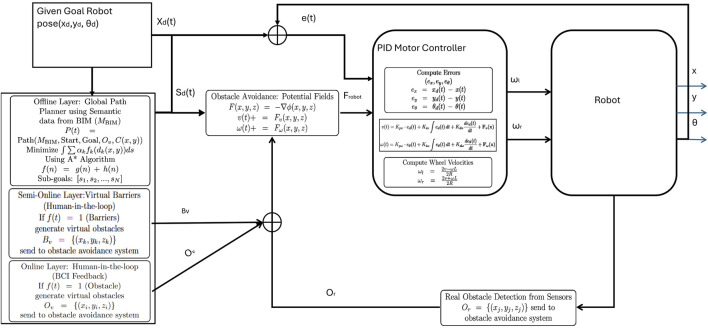 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5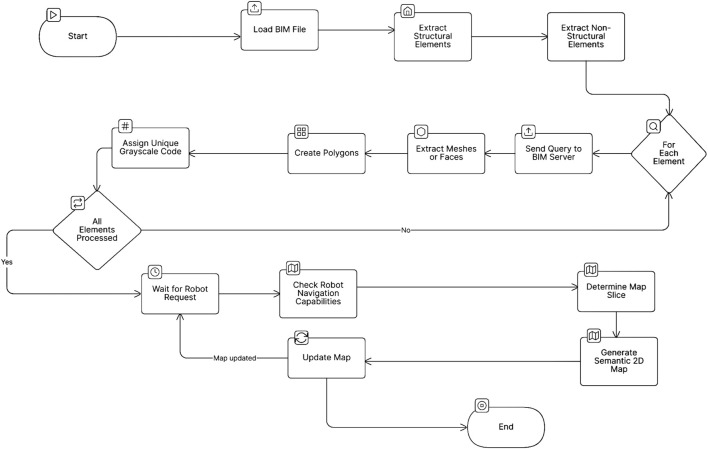 Figure 6
Figure 6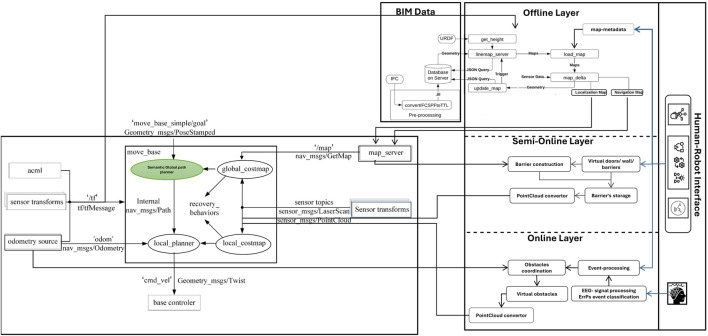 Figure 7
Figure 7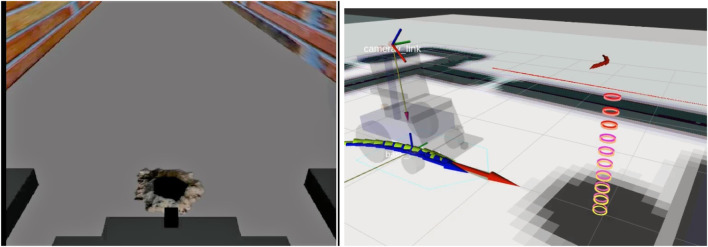 Figure 8
Figure 8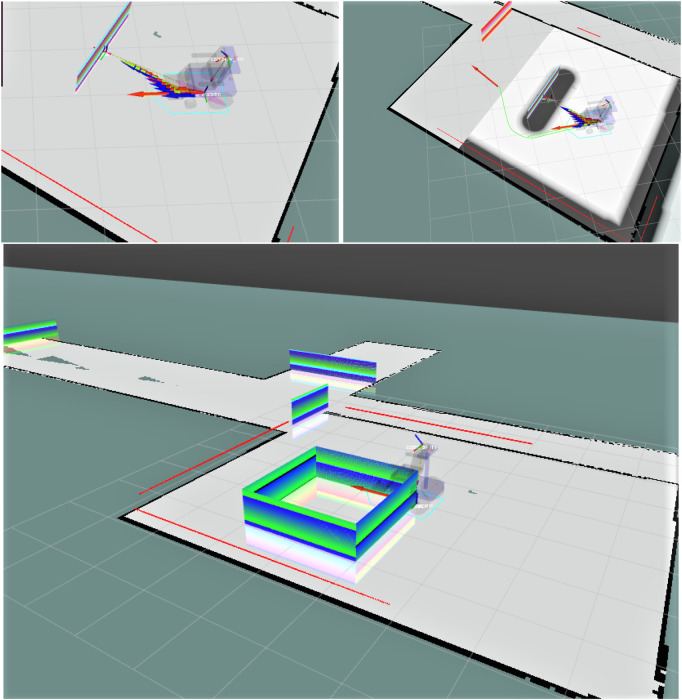 Figure 9
Figure 9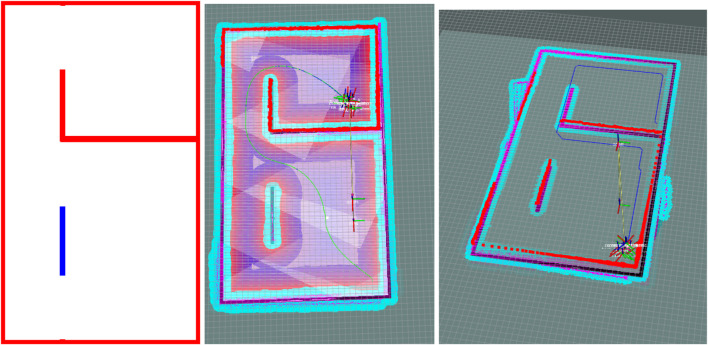 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Robotics and Automated Systems · Robotic Path Planning Algorithms