Design of an ankle exoskeleton with twisted string actuation for running assistance
Guan Rong Tan, Steven H. Collins

TL;DR
A new ankle exoskeleton using twisted string actuators can reduce the energy needed for running, though the strings wear out quickly.
Contribution
A portable ankle exoskeleton with high peak power and torque using twisted string actuators is designed and tested for running assistance.
Findings
The exoskeleton reduced metabolic energy use by 10.8% during treadmill running.
It reduced the cost of transport by 7.7% during outdoor running.
The twisted string actuators provided 700 W per leg and 43 Nm peak torque but lasted only about 5 minutes before breaking.
Abstract
Exoskeletons that make running easier could increase users’ physical activity levels and provide related health benefits. In this paper, we present the design of a portable, powered ankle exoskeleton that assists running and uses lightweight and compact twisted string actuators. It has limited durability at this stage of development, but preliminary results of its power to mass density and potential for reducing the metabolic cost of running are promising. The exoskeleton can provide high peak power of 700 W per leg, 7 times more than prior twisted-string devices, and high peak torques of 43 Nm. Kinetostatic and dynamic models were used to select mass-optimal components, producing a device that weighs 1.8 kg per leg and 2.0 kg in a backpack. We performed preliminary tests on a single participant to evaluate the exoskeleton performance during both treadmill running and outdoor running.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11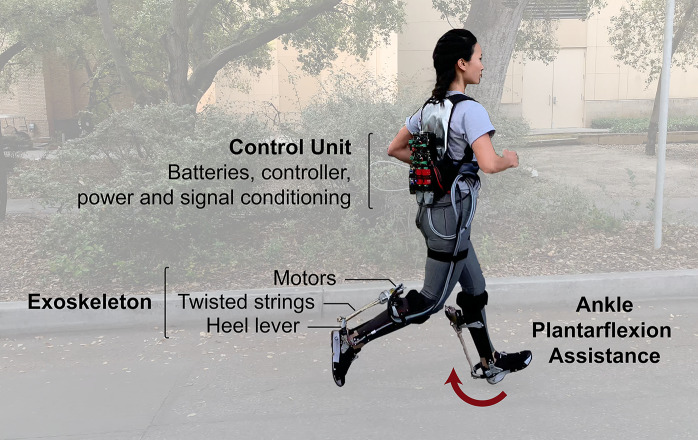 Figure 1
Figure 1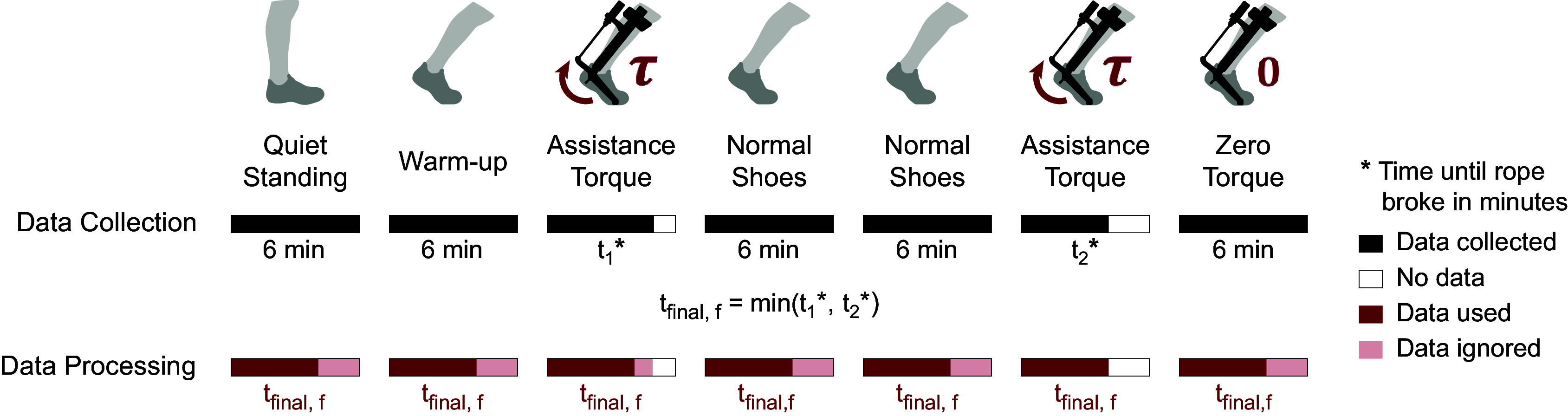 Figure 10
Figure 10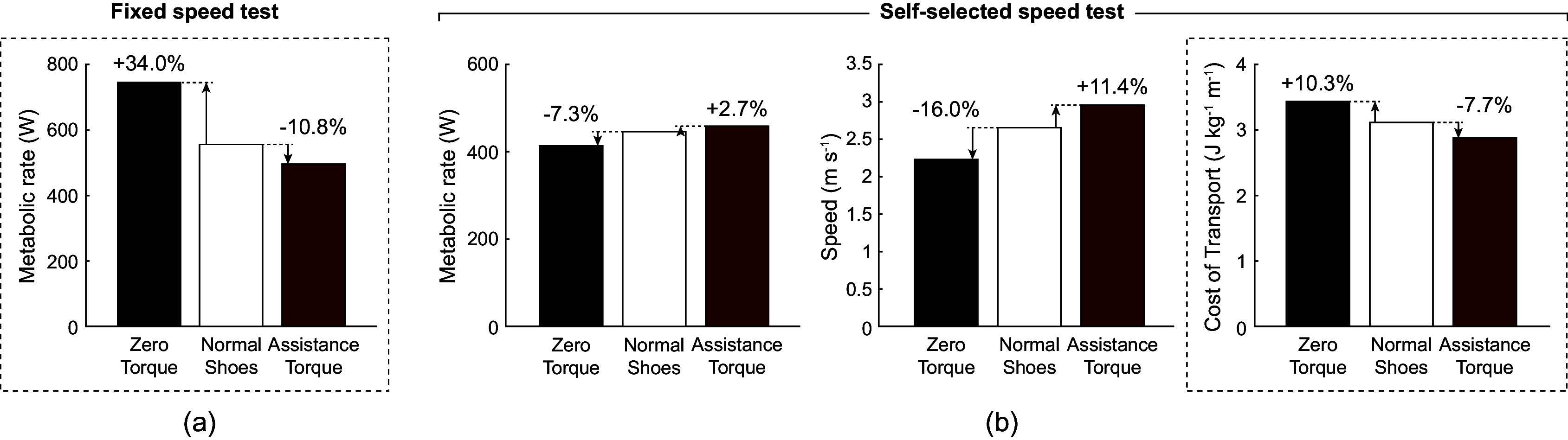 Figure 11
Figure 11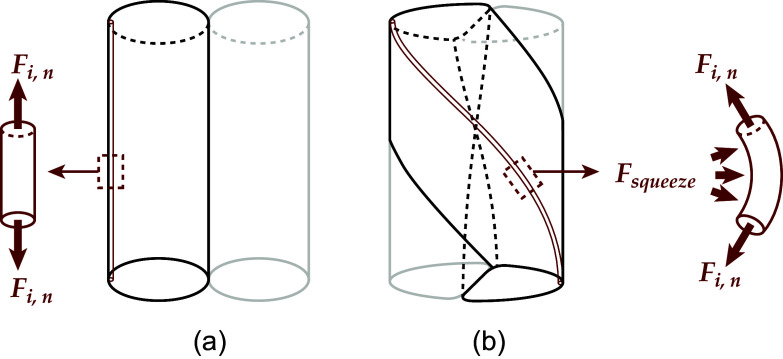 Figure 12
Figure 12 Figure 13
Figure 13 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4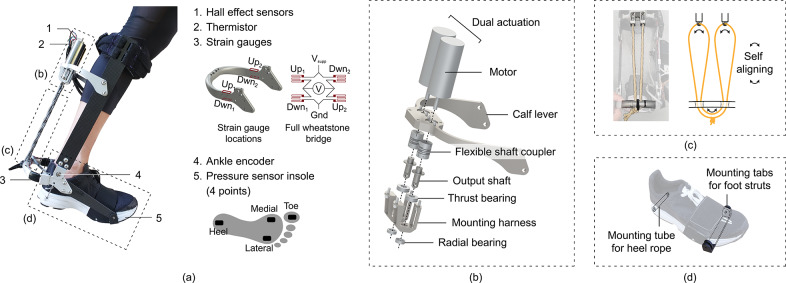 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8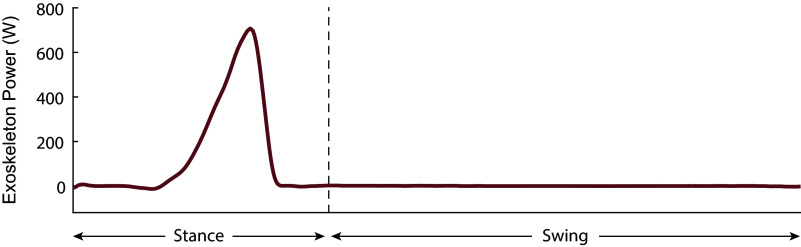 Figure 9
Figure 9 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35 Figure 36
Figure 36 Figure 37
Figure 37 Figure 38
Figure 38 Figure 39
Figure 39 Figure 40
Figure 40 Figure 41
Figure 41 Figure 42
Figure 42 Figure 43
Figure 43 Figure 44
Figure 44 Figure 45
Figure 45 Figure 46
Figure 46 Figure 47
Figure 47 Figure 48
Figure 48 Figure 49
Figure 49 Figure 50
Figure 50Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsProsthetics and Rehabilitation Robotics · Muscle activation and electromyography studies · Balance, Gait, and Falls Prevention