Advancing Point Cloud Perception: A Focus on People Detection
Assia Belbachir, Antonio M. Ortiz, Atle Aalerud, Ahmed Nabil Belbachir

TL;DR
This paper introduces a method using a Random Forest Classifier to detect people in 3D point cloud data from LiDAR, addressing challenges like sparsity and occlusions.
Contribution
The paper introduces a feature-engineered pipeline with a compact feature set and ground-removal algorithm for efficient human detection in LiDAR data.
Findings
The RFC-based approach achieves good performance in people detection on high-resolution LiDAR data.
The proposed method outperforms MLP and PointNet baselines in real-time human detection.
The pipeline is validated for practical applicability in on-device point-cloud environments.
Abstract
Point-cloud data have become pivotal for three-dimensional scene analysis, yet robust real-time detection of humans remains challenging due to data sparsity, irregular sampling, and occlusions. In this study, we present a feature-engineered pipeline that uses a Random Forest Classifier (RFC) for efficient people detection in high-resolution LiDAR point clouds. Our contributions include: (1) detailed parameterization of a ground-removal algorithm using region growing; a compact feature set of 15 geometric and intensity-based descriptors; (3) comprehensive evaluation metrics on two datasets; and (4) comparative analysis against MLP and PointNet baselines. Experiments demonstrate that our RFC achieves good results. These results validate the practical applicability of our approach for real-time, on-device human detection in point-cloud environments.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4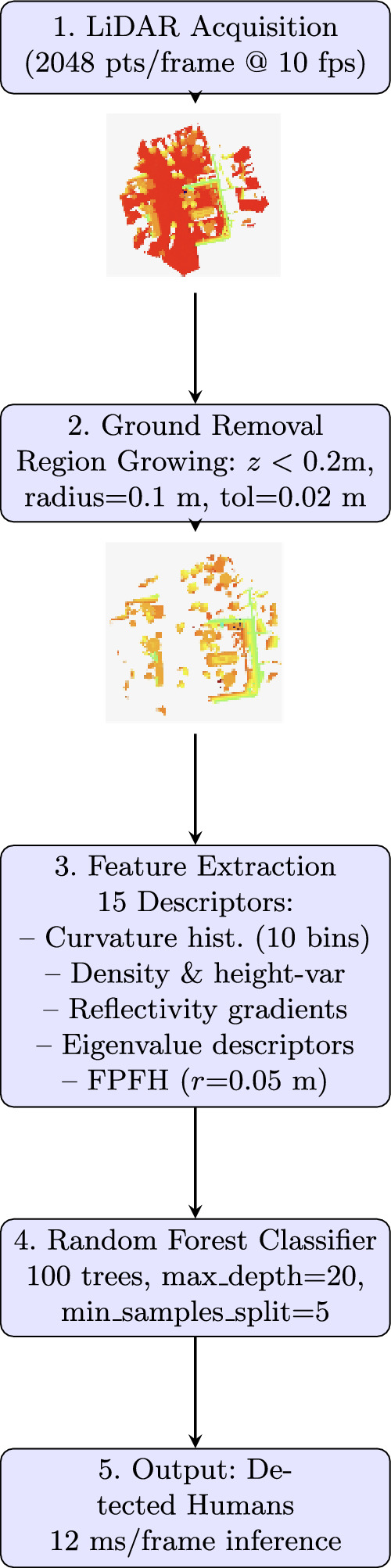 Figure 5
Figure 5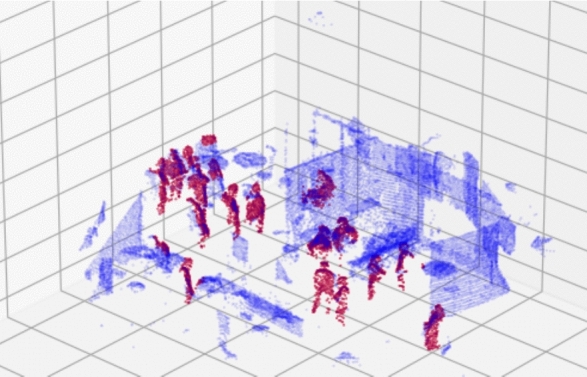 Figure 6
Figure 6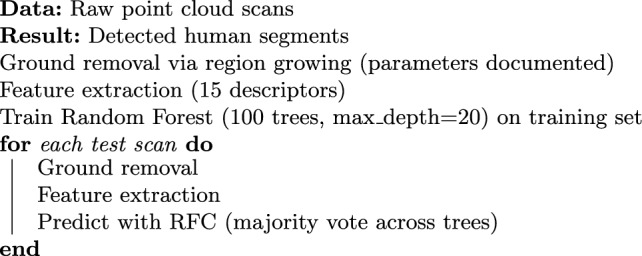 Figure 7
Figure 7 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRemote Sensing and LiDAR Applications · Video Surveillance and Tracking Methods · 3D Surveying and Cultural Heritage