CPG-Based Control of an Octopod Biomimetic Machine Lobster for Mining Applications: Design and Implementation in Challenging Underground Environments
Jianwei Zhao, Haokun Zhang, Mingsong Bao, Boxiang Yin, Yiteng Zhang, Zhen Jiang

TL;DR
This paper designs an octopod robot inspired by lobsters, using CPGs for control in mining environments.
Contribution
A novel octopod robot with SMA actuators and a CPG-based control system for subterranean tasks is developed and validated.
Findings
A 24-DOF gait pattern was designed and validated using MATLAB simulations.
The CPG network effectively enabled forward locomotion in dynamic simulations.
The robot's design and control system show feasibility and robustness in challenging environments.
Abstract
Central pattern generators (CPGs) have been extensively researched and validated as a well-established methodology for bionic control, particularly within the field of legged robotics. However, investigations concerning octopod robots remain relatively sparse. This study presents the design of an octopod robotic system inspired by the biological characteristics of lobsters. The machine lobster utilizes remote sensing technology to execute designated tasks in subterranean and mining environments, with its motion regulated by CPGs, accompanied by a comprehensive simulation analysis. The research commenced with the modeling of a biomimetic lobster robot, which features a three-degree-of-freedom leg structure and torso, interconnected by shape memory alloys (SMAs) that serve as muscle actuators. Mathematically, both forward and inverse kinematics were formulated for the robot’s legs, and a…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
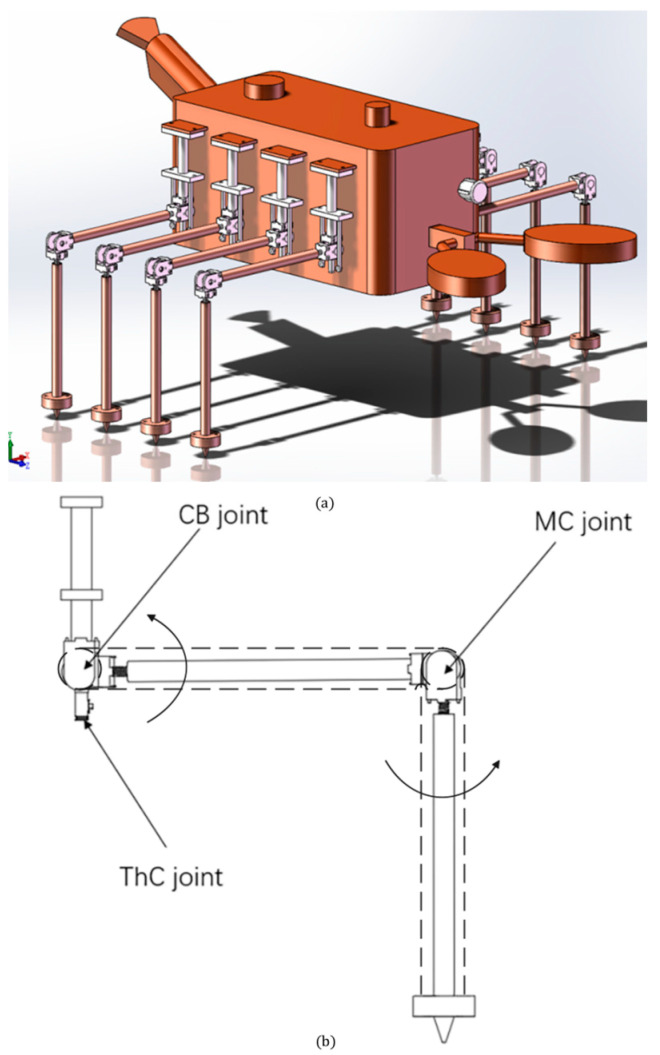 Figure 1
Figure 1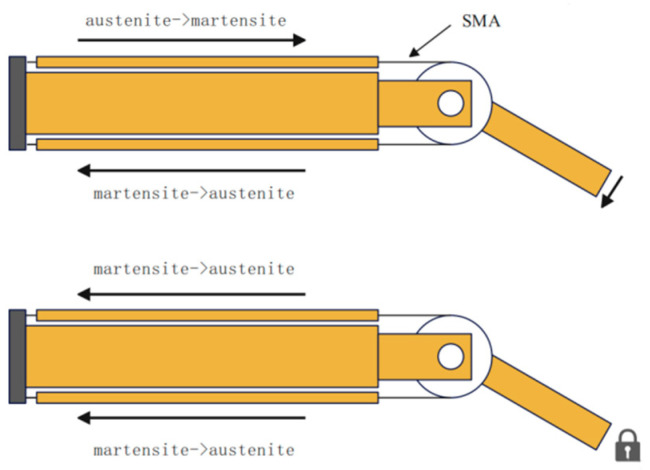 Figure 2
Figure 2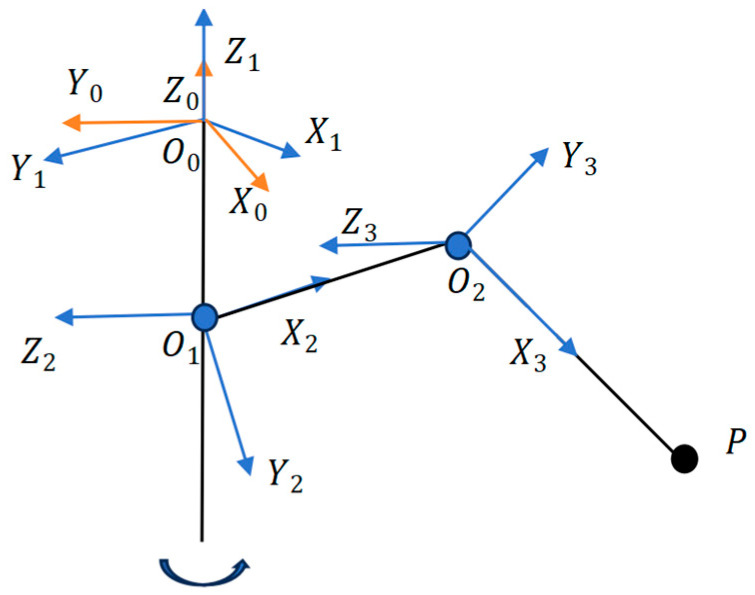 Figure 3
Figure 3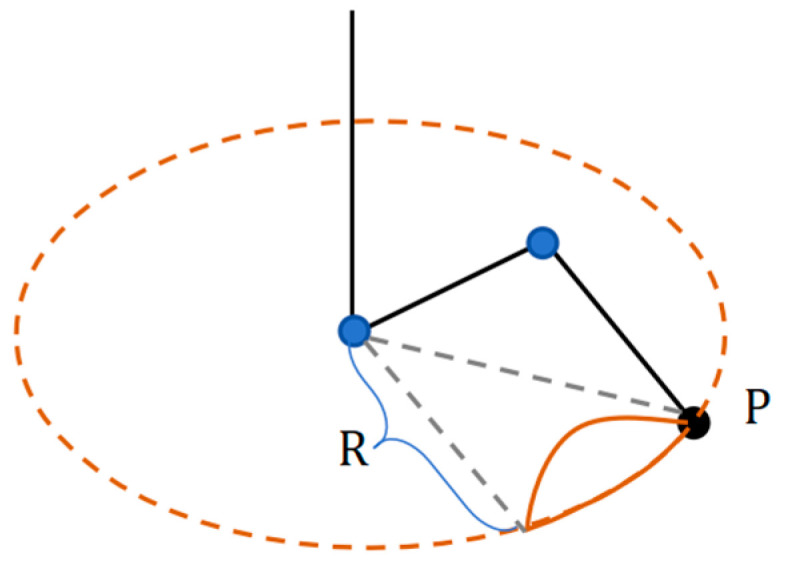 Figure 4
Figure 4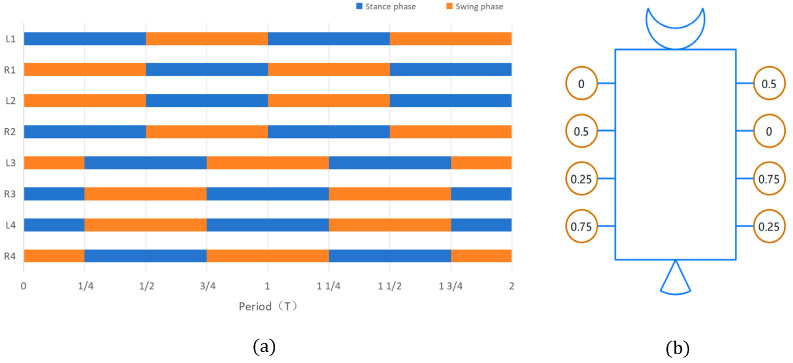 Figure 5
Figure 5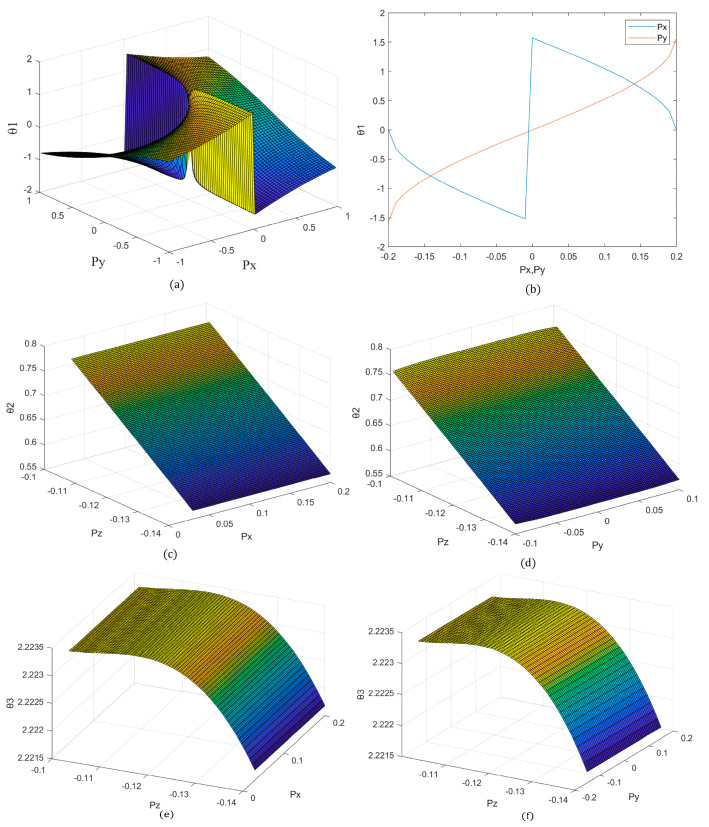 Figure 6
Figure 6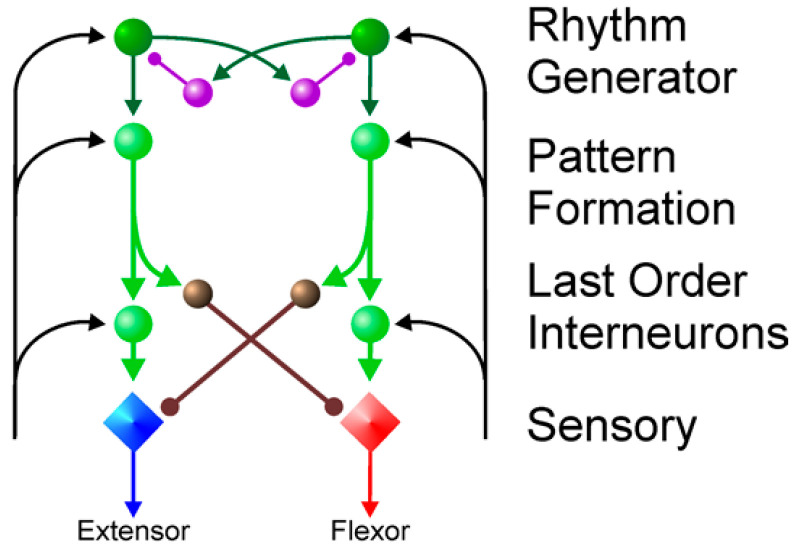 Figure 7
Figure 7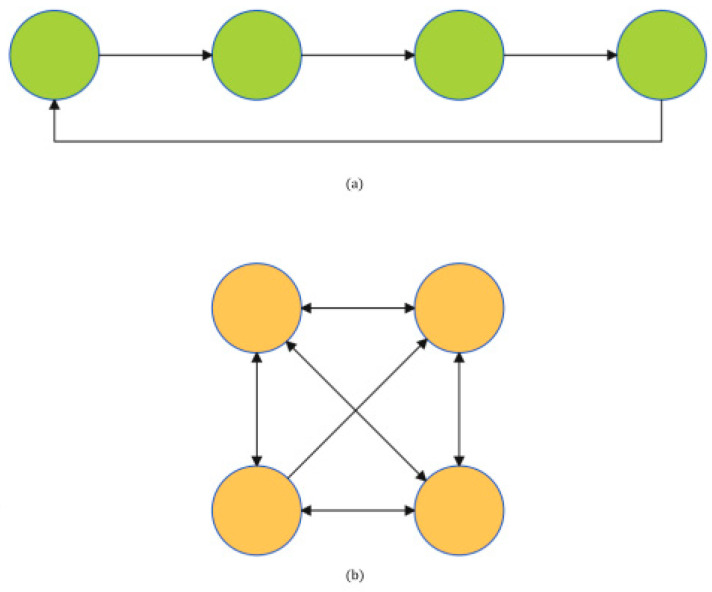 Figure 8
Figure 8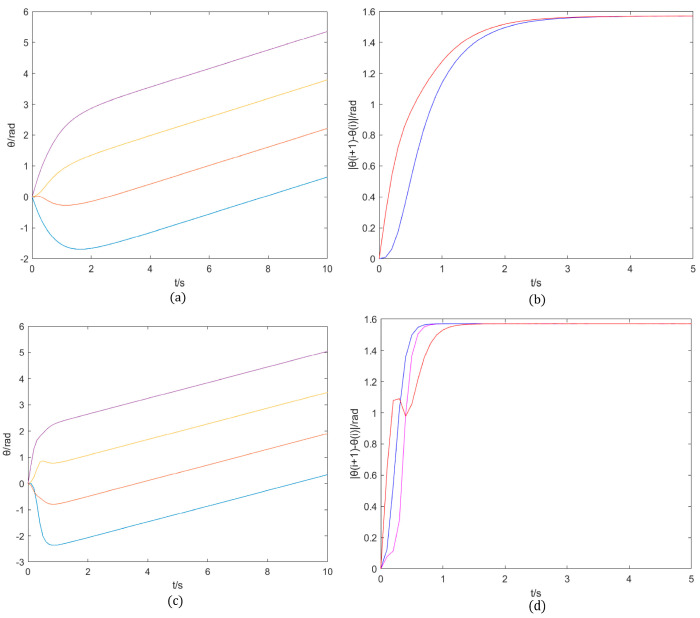 Figure 9
Figure 9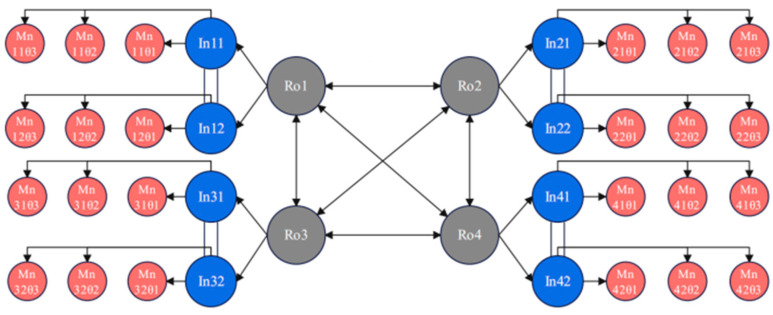 Figure 10
Figure 10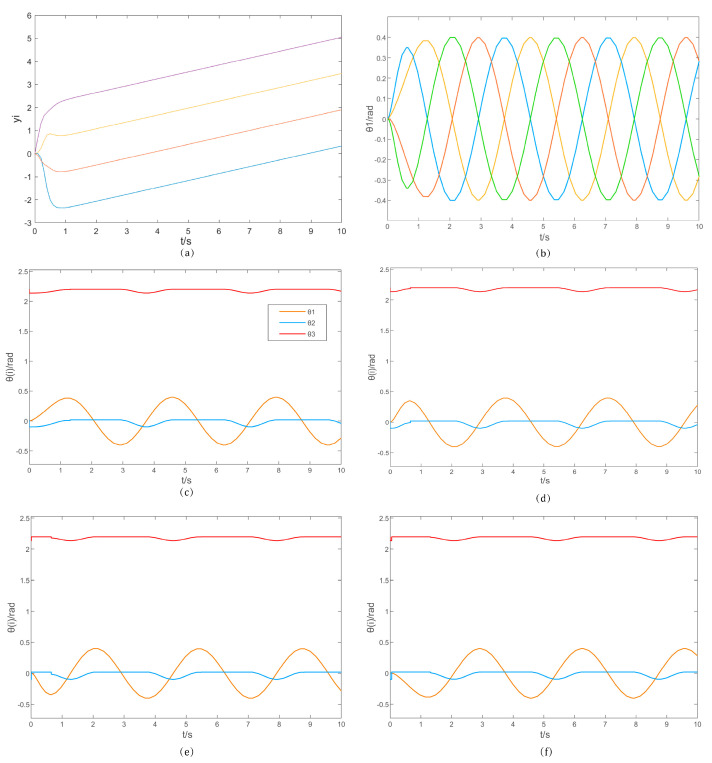 Figure 11
Figure 11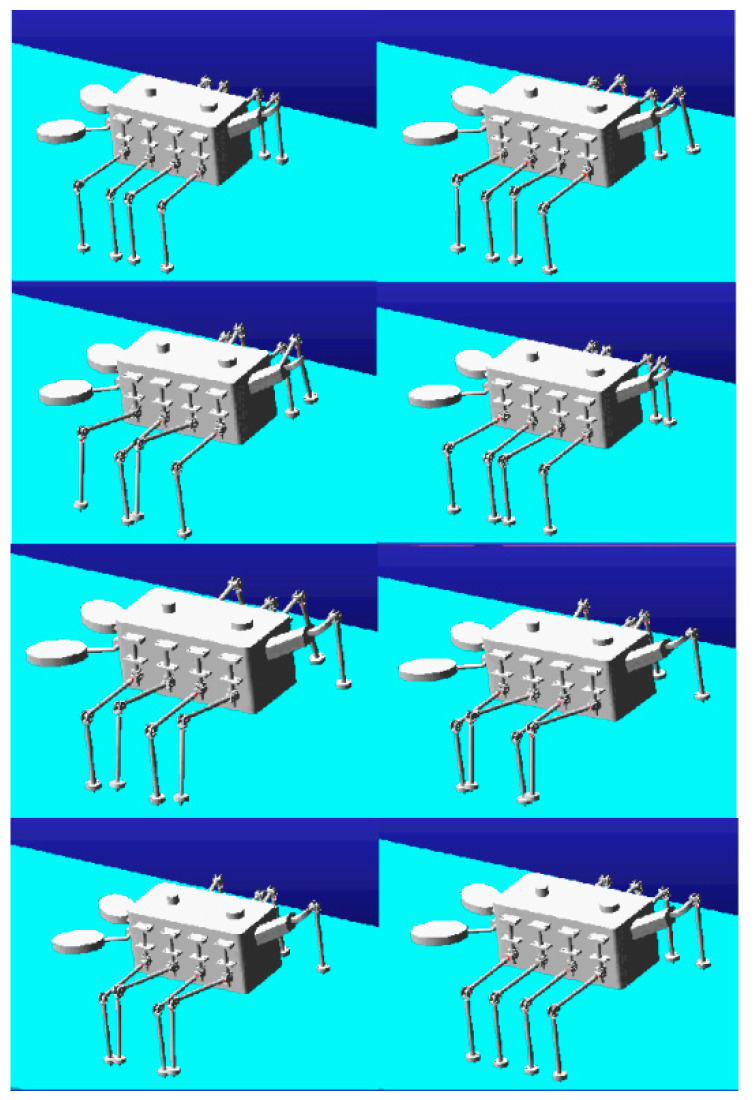 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Robot Manipulation and Learning · Soft Robotics and Applications