Dynamic Bearing–Angle for Vision-Based UAV Target Motion Analysis
Yu Luo, Hongwei Fu, Tingting Fu, Hao Cha, Bing Tian, Huatao Tang, Feng Liu

TL;DR
This paper introduces a new algorithm called Dynamic Bearing–Angle to improve the accuracy and robustness of vision-based motion estimation for UAVs in dynamic environments.
Contribution
The paper proposes a dual robustness mechanism using dynamic noise adaptation and outlier suppression for improved target motion analysis.
Findings
The Dynamic Bearing–Angle algorithm effectively handles non-Gaussian noise and sudden target maneuvers.
Validation with simulations and real data shows the algorithm maintains robustness and accuracy under varying noise conditions.
Abstract
The Bearing–Angle algorithm effectively improves the observability of vision-based motion estimation for moving targets by combining the dimensional information of target detection frames. However, the robustness of this algorithm will be significantly reduced when the observation error increases due to sudden changes in the target motion state. To address this shortcoming, this paper proposes a visual target motion estimation algorithm called the Dynamic Bearing–Angle, which aims to improve the accuracy and robustness of target motion analysis in dynamic scenarios such as unmanned aerial vehicle (UAV). The algorithm innovatively introduces a dual robustness mechanism of dynamic noise intensity adaptation and outlier suppression based on M-estimation. By adjusting the noise covariance matrix in real time and assigning low weights to the outlier observations using the Huber weight…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
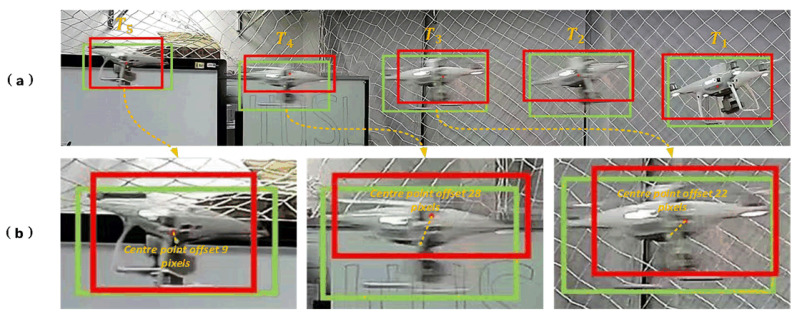 Figure 1
Figure 1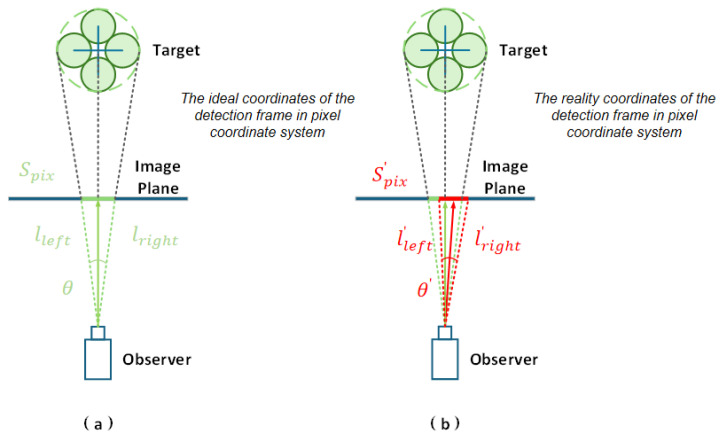 Figure 2
Figure 2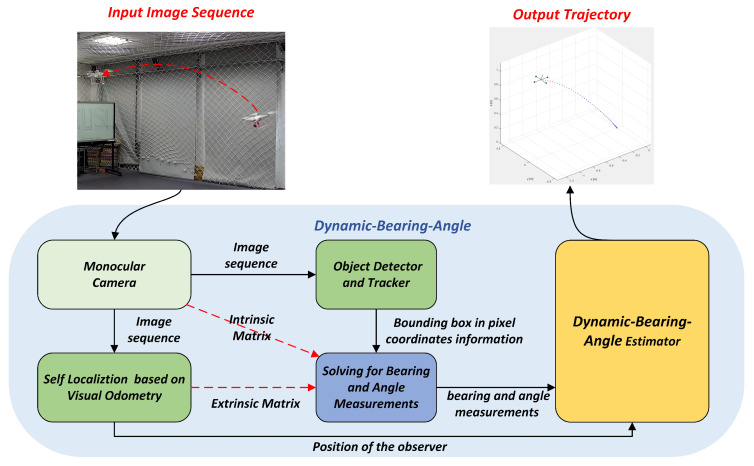 Figure 3
Figure 3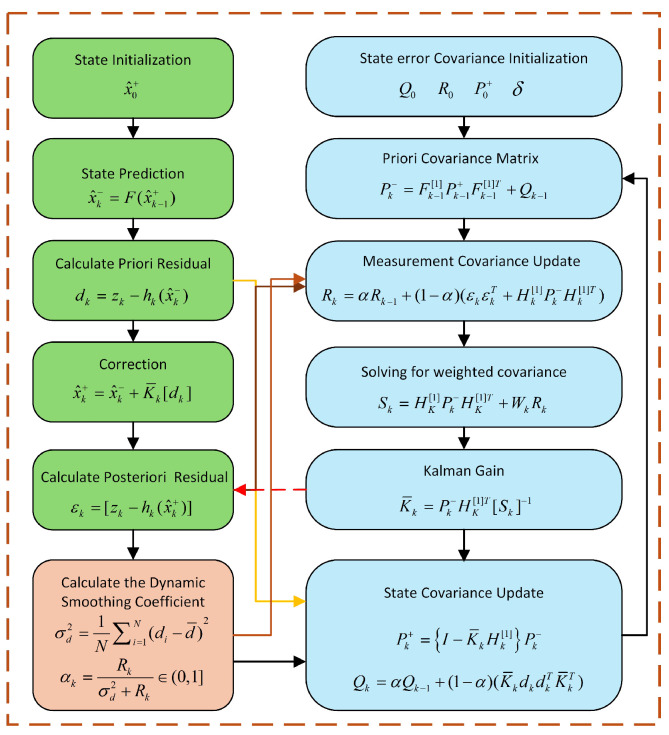 Figure 4
Figure 4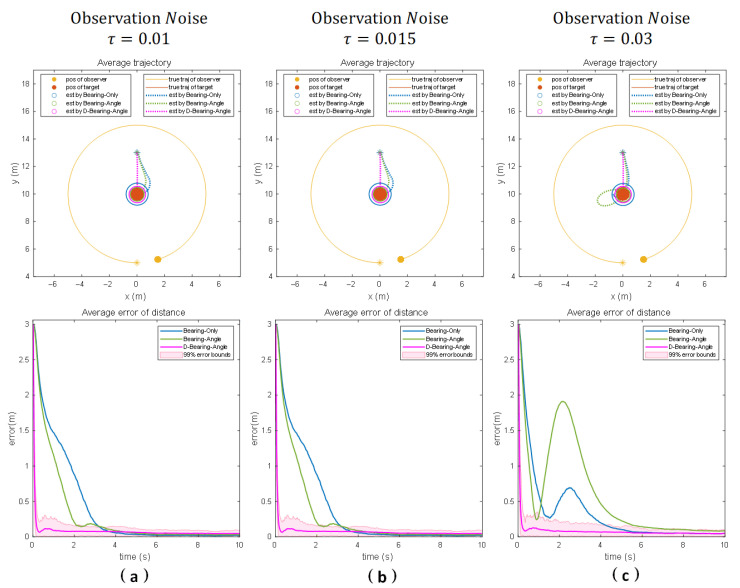 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8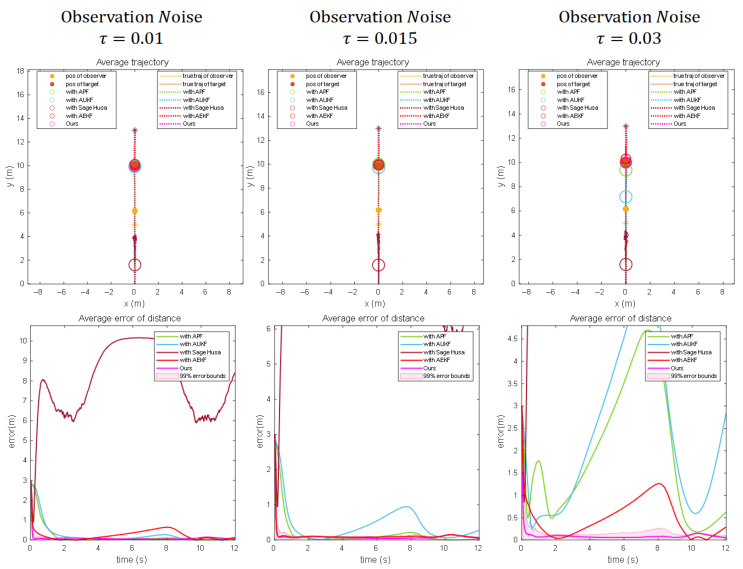 Figure 9
Figure 9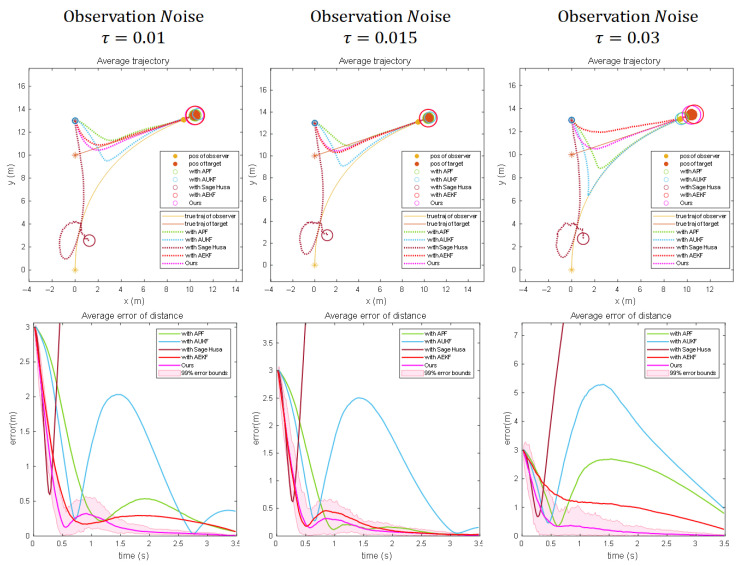 Figure 10
Figure 10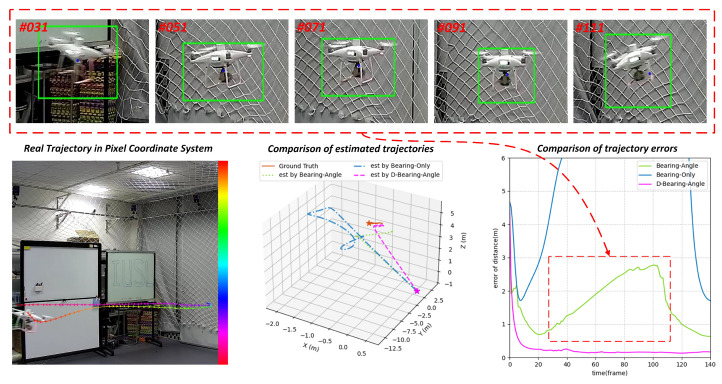 Figure 11
Figure 11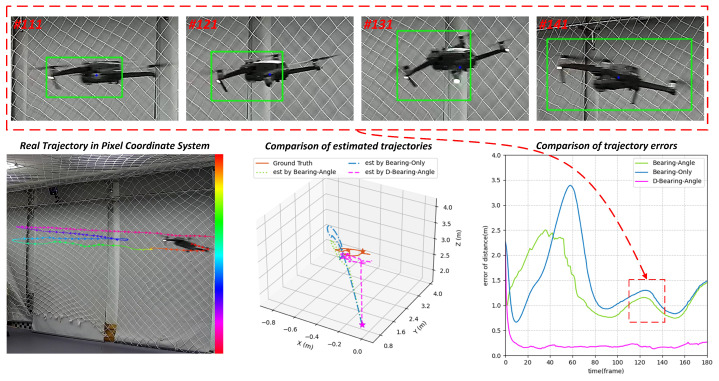 Figure 12
Figure 12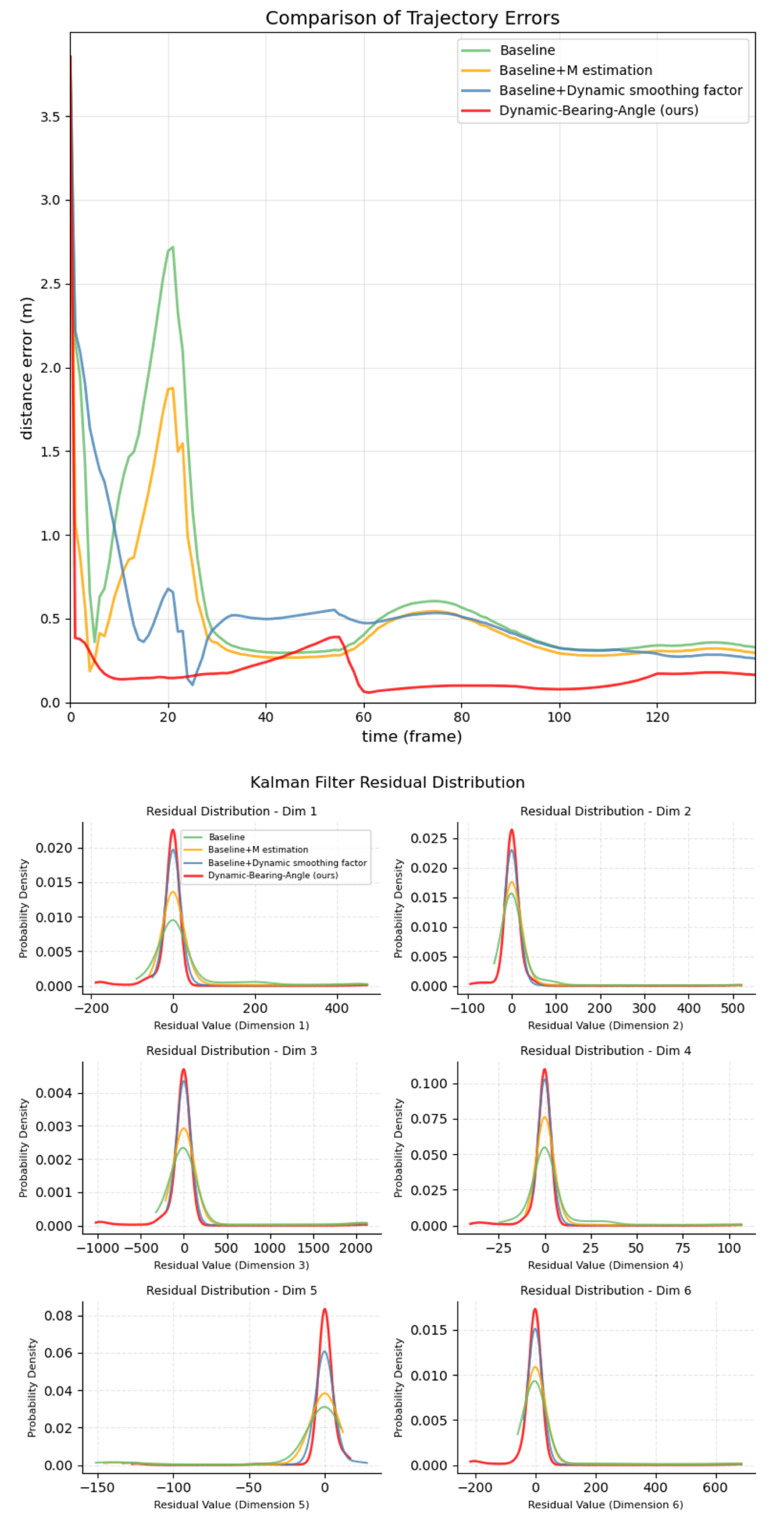 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsInfrared Target Detection Methodologies · Advanced Vision and Imaging · Robotics and Sensor-Based Localization