Improved Adaptive Sliding Mode Control Using Quasi-Convex Functions and Neural Network-Assisted Time-Delay Estimation for Robotic Manipulators
Jin Woong Lee, Jae Min Rho, Sun Gene Park, Hyuk Mo An, Minhyuk Kim, Seok Young Lee

TL;DR
This paper introduces a new adaptive control method for robotic manipulators using quasi-convex functions and neural networks to reduce chattering and improve stability.
Contribution
A novel adaptive sliding mode control method with quasi-convex functions and neural network-assisted time-delay estimation is proposed.
Findings
The proposed method effectively suppresses chattering in robotic manipulators.
Simulation and experiment results confirm the stability and effectiveness of the control strategy.
Abstract
This study presents an adaptive sliding mode control strategy tailored for robotic manipulators, featuring a quasi-convex function-based control gain and a time-delay estimation (TDE) enhanced by neural networks. To compensate for TDE errors, the proposed method utilizes both the previous TDE error and radial basis function neural networks with a weight update law that includes damping terms to prevent divergence. Additionally, a continuous gain function that is quasi-convex function dependent on the magnitude of the sliding variable is proposed to replace the traditional switching control gain. This continuous function-based gain has effectiveness in suppressing chattering phenomenon while guaranteeing the stability of the robotic manipulator in terms of uniform ultimate boundedness, which is demonstrated through both simulation and experiment results.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
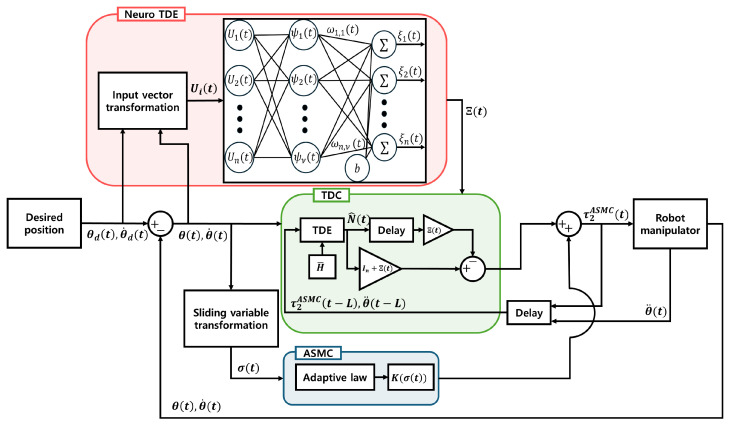 Figure 1
Figure 1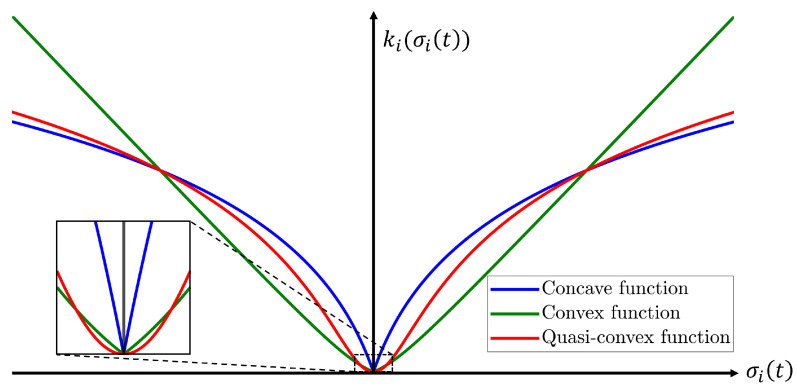 Figure 2
Figure 2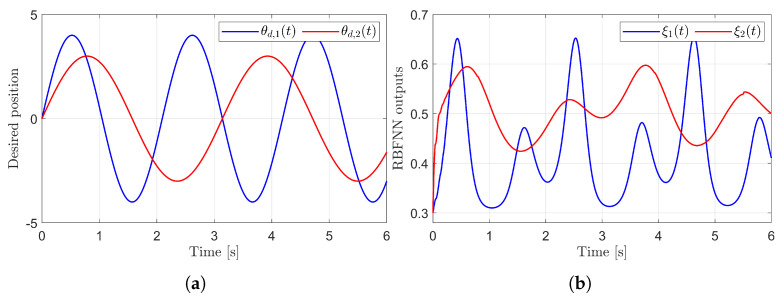 Figure 3
Figure 3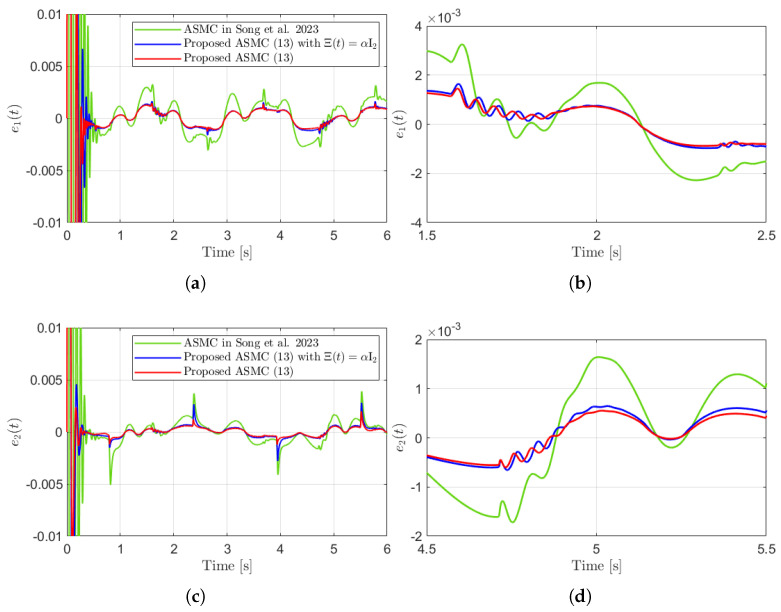 Figure 4
Figure 4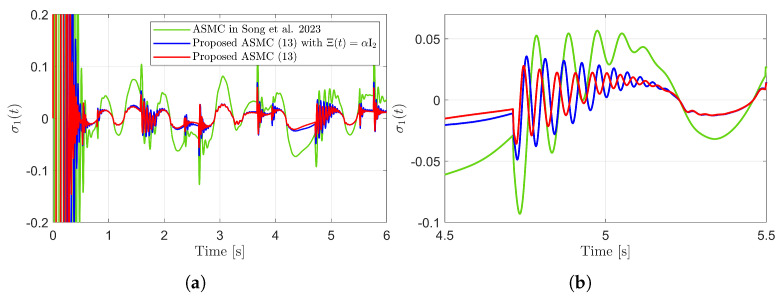 Figure 5
Figure 5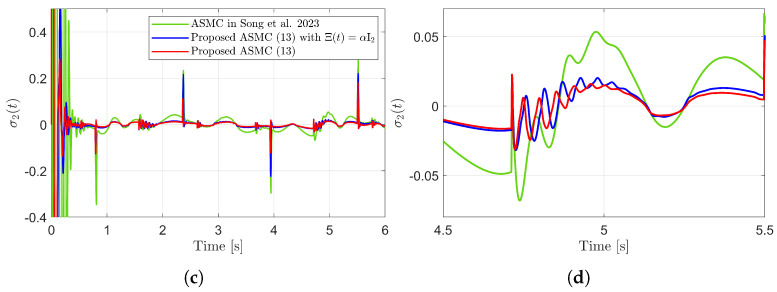 Figure 6
Figure 6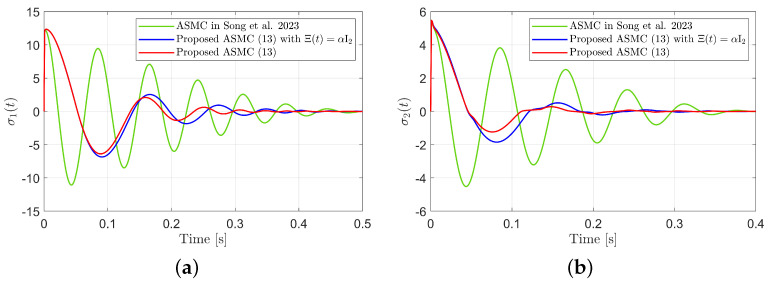 Figure 7
Figure 7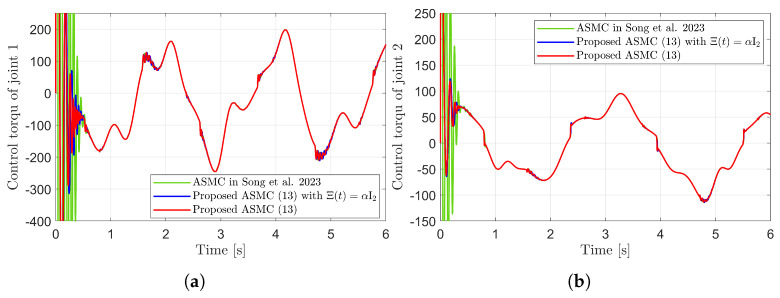 Figure 8
Figure 8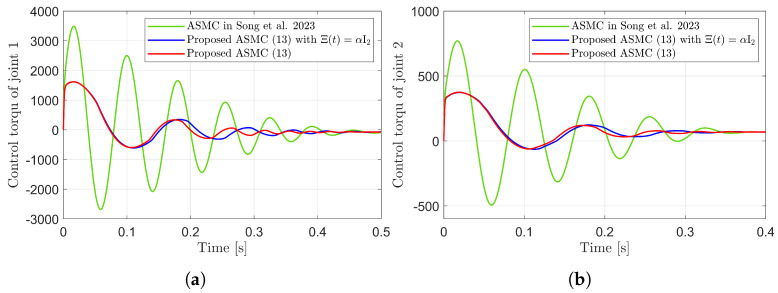 Figure 9
Figure 9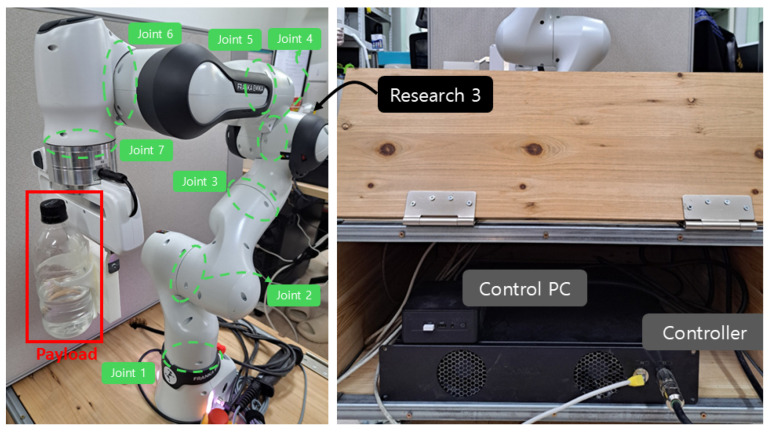 Figure 10
Figure 10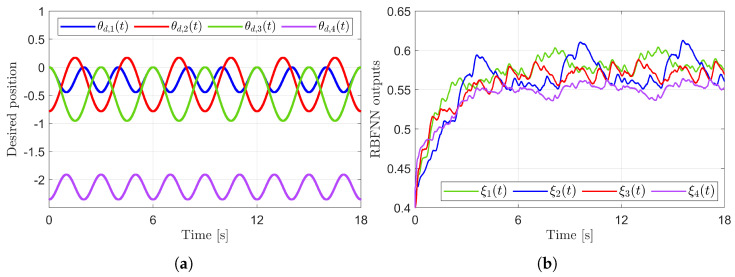 Figure 11
Figure 11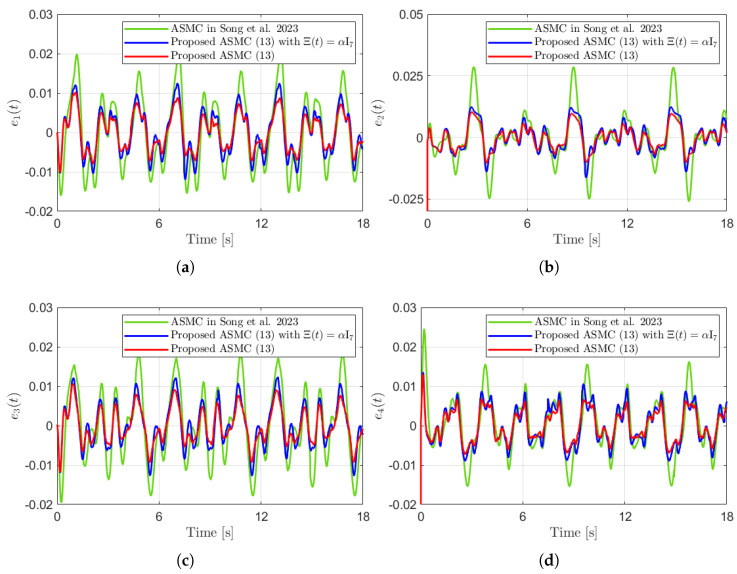 Figure 12
Figure 12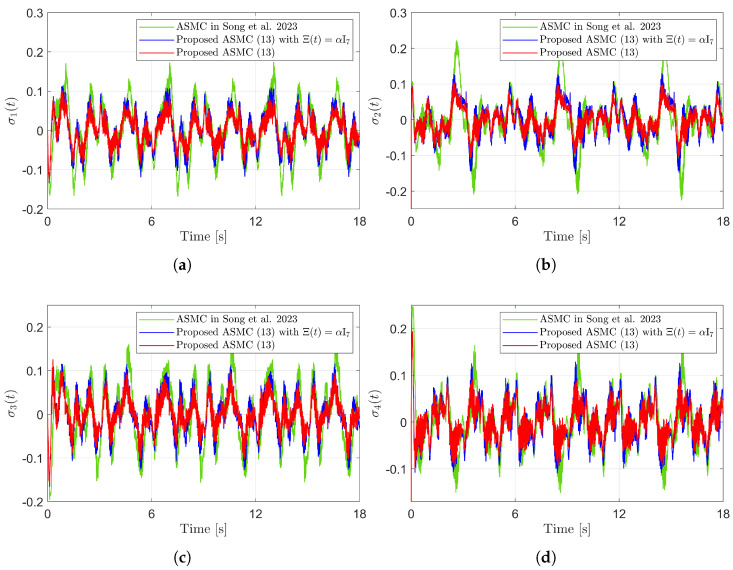 Figure 13
Figure 13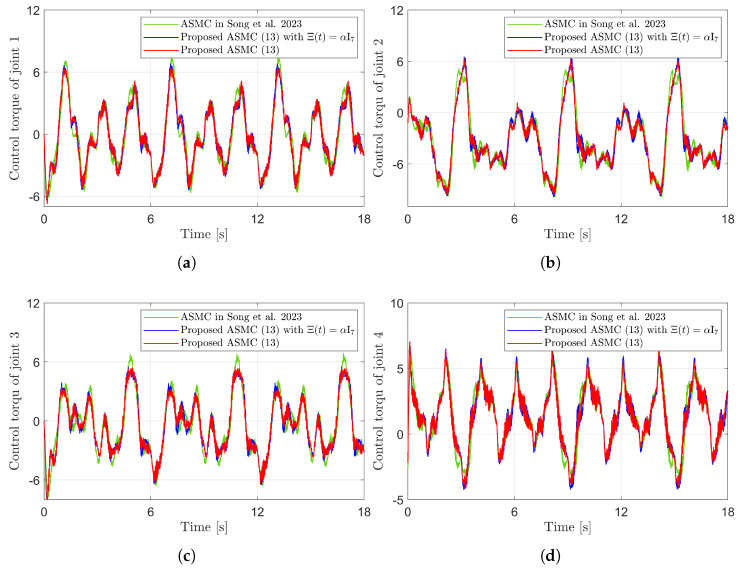 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdaptive Control of Nonlinear Systems · Dynamics and Control of Mechanical Systems · Vehicle Dynamics and Control Systems