Target Approaching Control Under a GPS-Denied Environment with Range-Only Measurements
Bin Chen, Zhenghao Jing, Yinke Dou, Yan Chen, Liwei Kou

TL;DR
This paper presents a control strategy for a vehicle to approach a target area using only distance measurements, without GPS or bearing information.
Contribution
A novel local controller is proposed that uses only range-only measurements to ensure convergence to a target region.
Findings
The control strategy guarantees convergence to the target region with at most three velocity adjustments.
Theoretical analysis and outdoor experiments validate the effectiveness of the proposed method.
Abstract
In this paper, we investigate the target-approaching control problem for a discrete-time first-order vehicle system where the target area is modeled as a static circular region. In the absence of absolute bearing or position information, we propose a simple local controller that relies solely on range measurements to the target obtained at two consecutive sampling instants. Specifically, if the measured distance decreases between two successive samples, the vehicle maintains a constant velocity; otherwise, it rotates its velocity vector by an angle of π/2 in the clockwise direction. This control strategy guarantees convergence to the target region, ensuring that the vehicle’s velocity direction remains unchanged in the best-case scenario and is adjusted at most three times in the worst case. The effectiveness of the proposed method is theoretically established and further validated…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
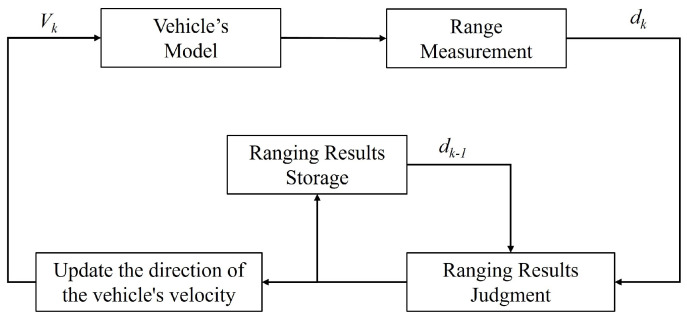 Figure 1
Figure 1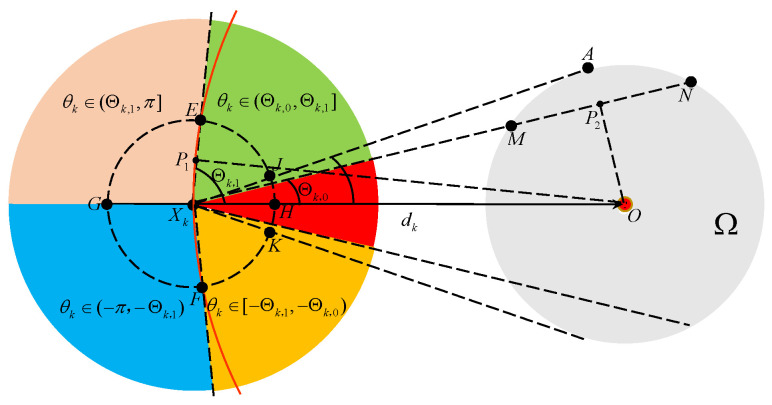 Figure 2
Figure 2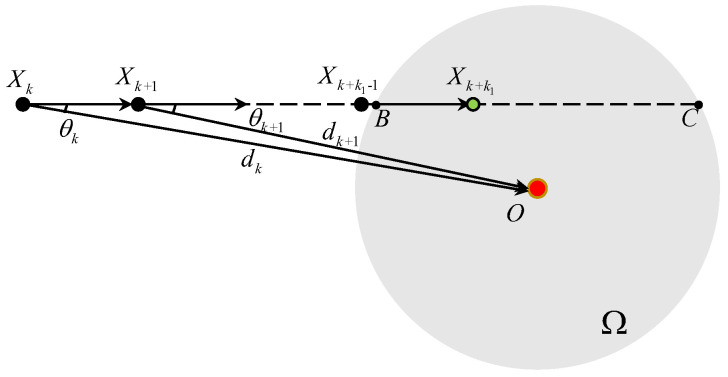 Figure 3
Figure 3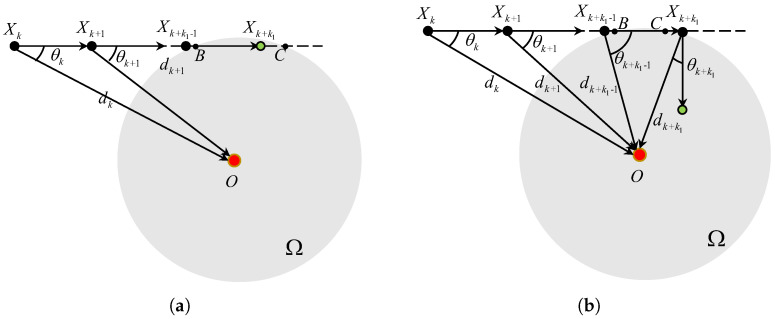 Figure 4
Figure 4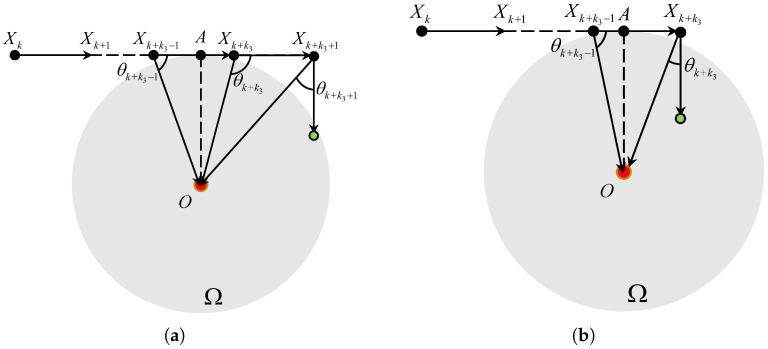 Figure 5
Figure 5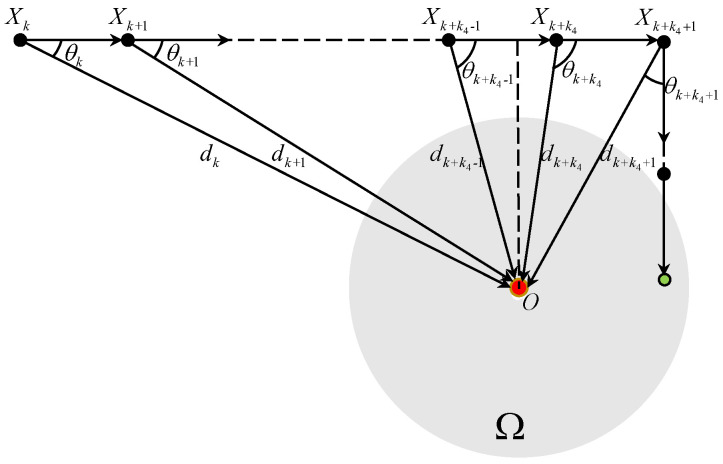 Figure 6
Figure 6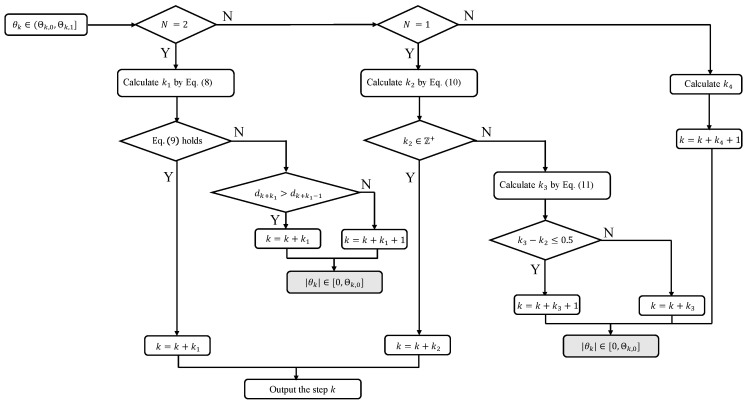 Figure 7
Figure 7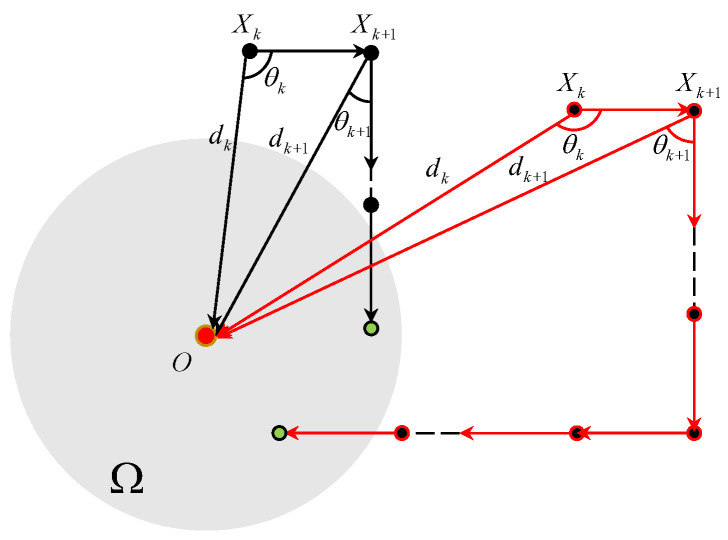 Figure 8
Figure 8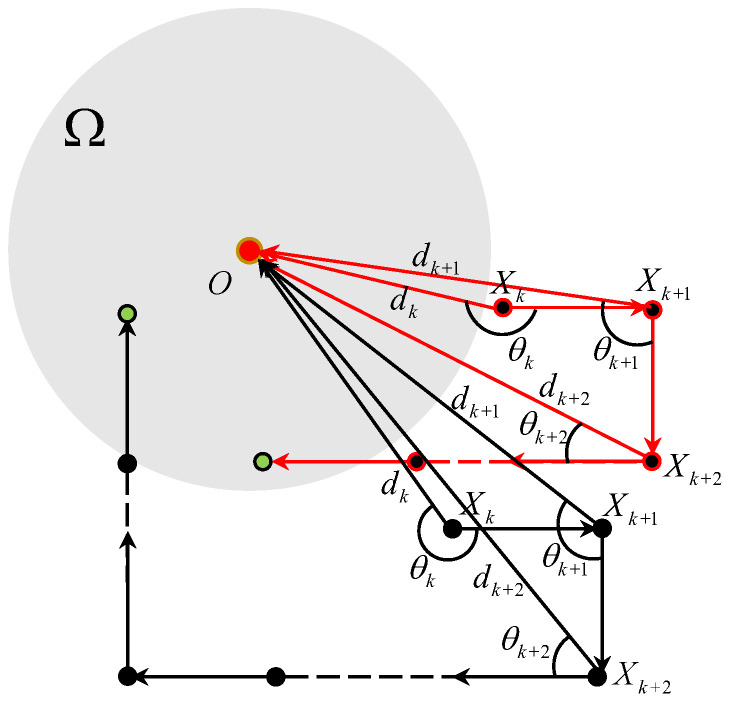 Figure 9
Figure 9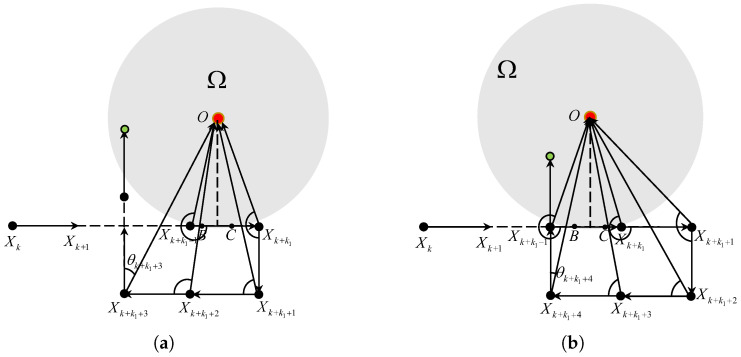 Figure 10
Figure 10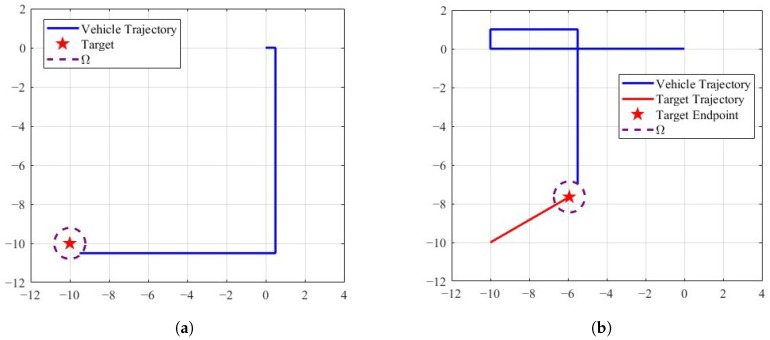 Figure 11
Figure 11 Figure 12
Figure 12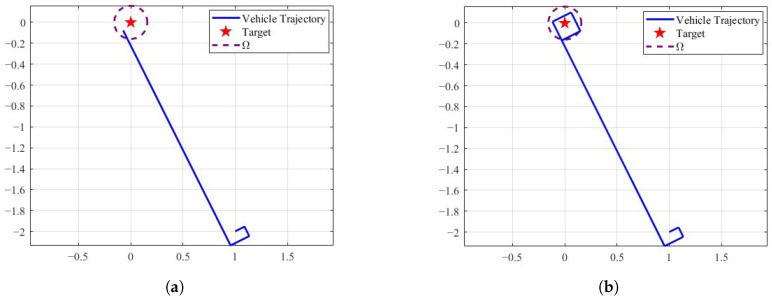 Figure 13
Figure 13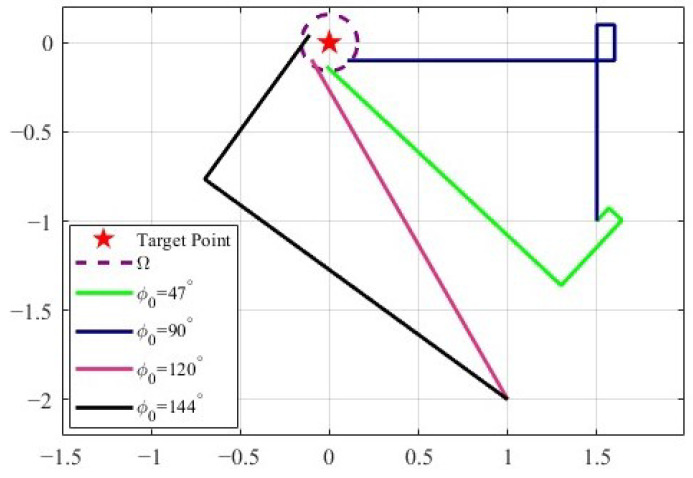 Figure 14
Figure 14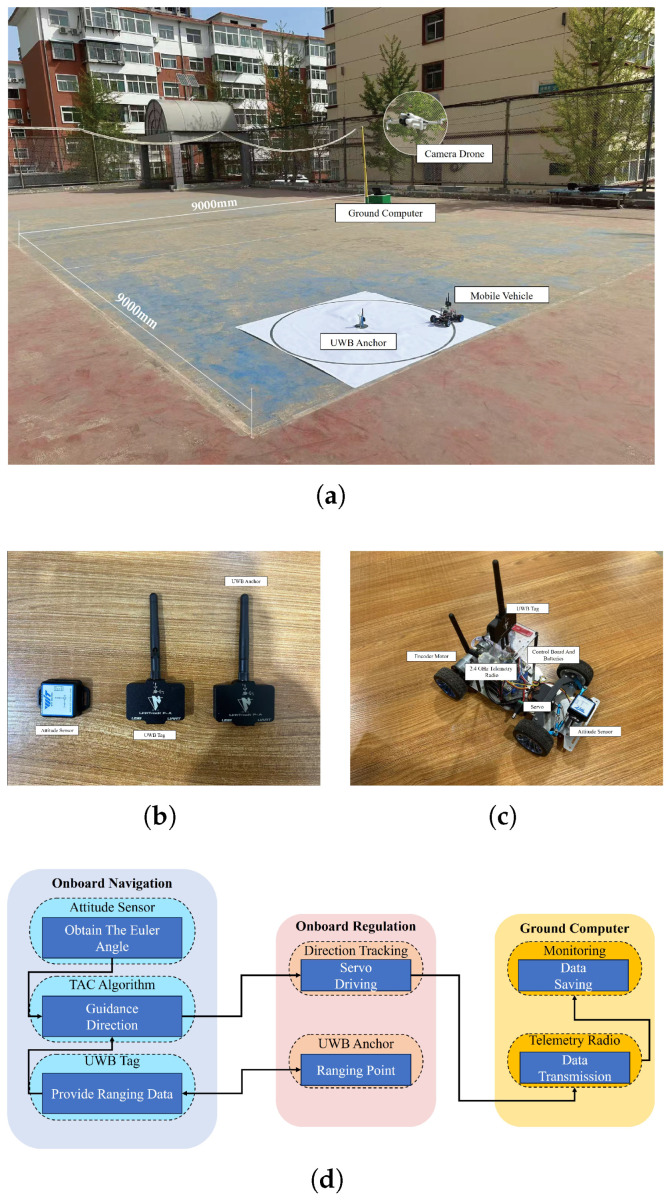 Figure 15
Figure 15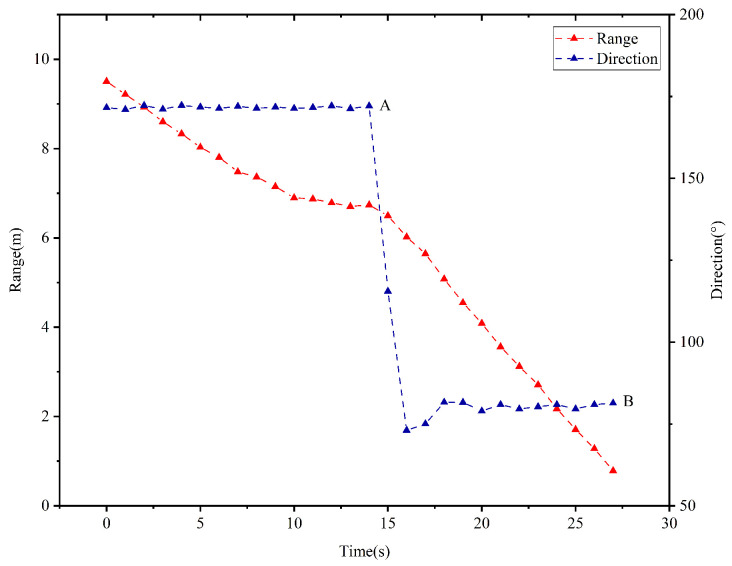 Figure 16
Figure 16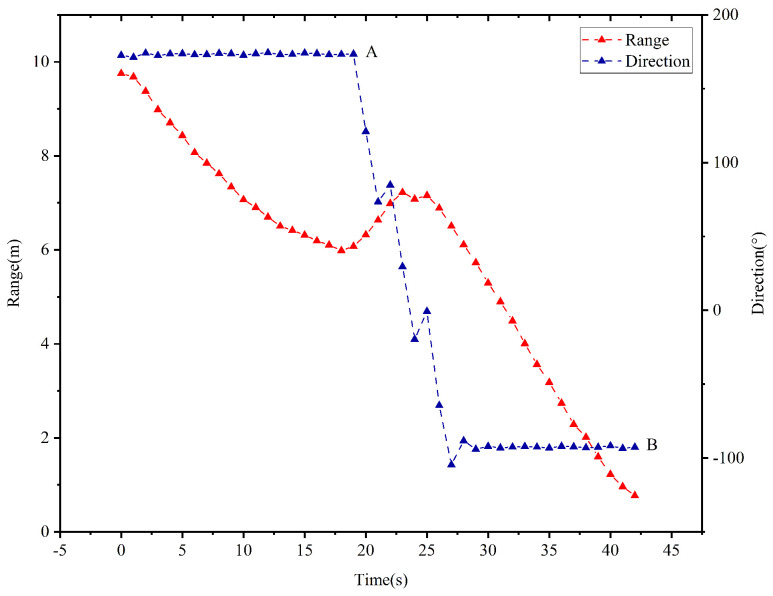 Figure 17
Figure 17Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsExtremum Seeking Control Systems · Adaptive Control of Nonlinear Systems · Advanced Control Systems Optimization