An Analysis of the Design and Kinematic Characteristics of an Octopedic Land–Air Bionic Robot
Jianwei Zhao, Jiaping Gao, Mingsong Bao, Hao Zhai, Xu Pei, Zheng Jiang

TL;DR
This paper presents a new octopedal robot design that adapts to complex terrain and includes a flying module for obstacle navigation.
Contribution
The paper introduces an innovative adaptive wheel-leg configuration and a quadrotor module for enhanced terrain navigation.
Findings
The robot's design significantly improves adaptability and mobility in complex environments.
The integrated quadrotor module allows the robot to overcome impassable obstacles via short-distance flight.
Experimental tests validated the effectiveness of the robot's gait planning and dynamic coordination.
Abstract
The urgent need for complex terrain adaptability in industrial automation and disaster relief has highlighted the great potential of octopedal wheel-legged robots. However, their design complexity and motion control challenges must be addressed. In this study, an innovative design approach is employed to construct a highly adaptive robot architecture capable of intelligently adjusting the wheel-leg configuration to cope with changing environments. An advanced kinematic analysis and simulation techniques are combined with inverse kinematic algorithms and dynamic planning to achieve a typical ‘Step-Wise Octopedal Dynamic Coordination Gait’ and different gait planning and optimization. The effectiveness of the design and control strategy is verified through the construction of an experimental platform and field tests, significantly improving the robot’s adaptability and mobility in complex…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1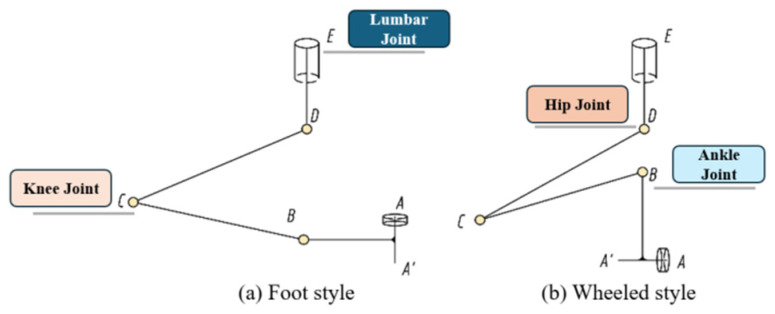 Figure 2
Figure 2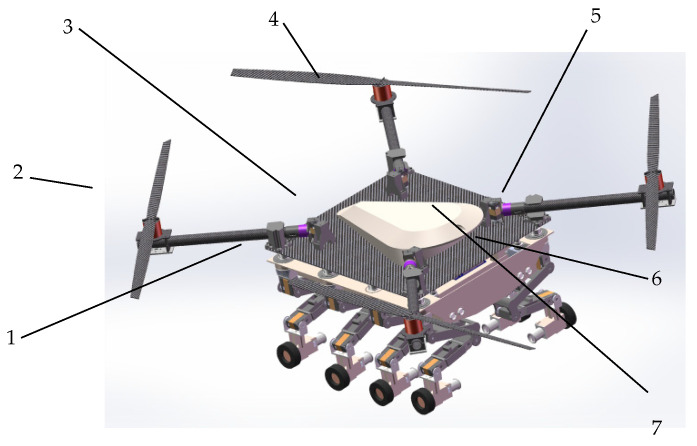 Figure 3
Figure 3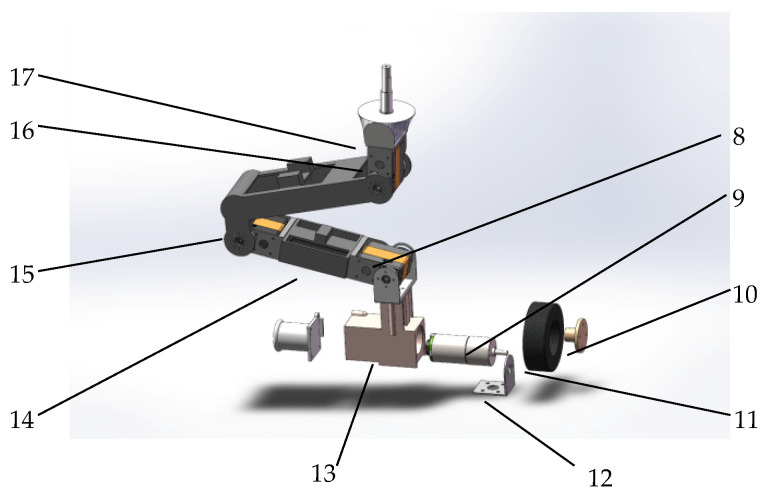 Figure 4
Figure 4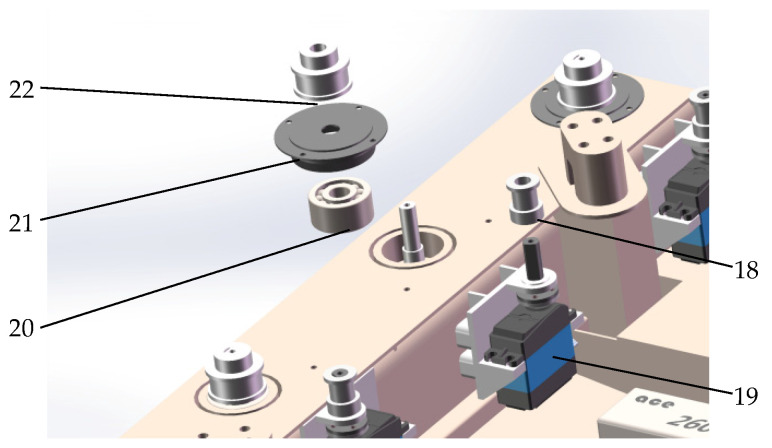 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13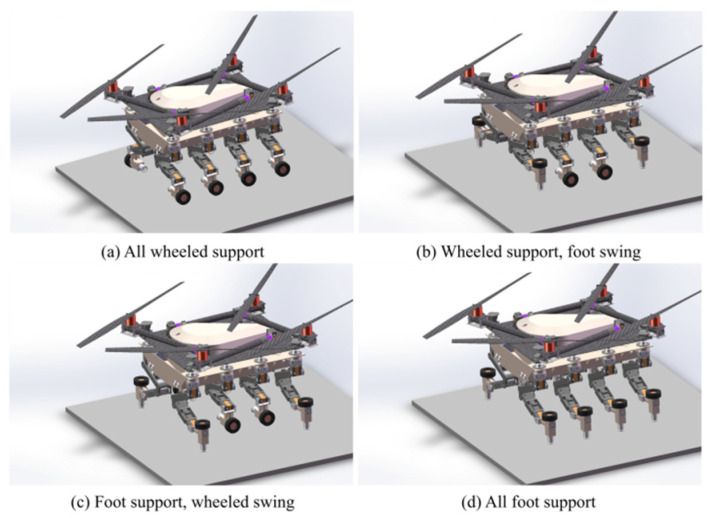 Figure 14
Figure 14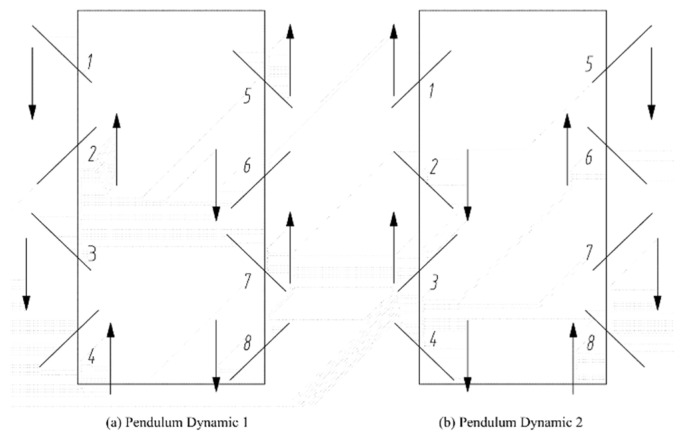 Figure 15
Figure 15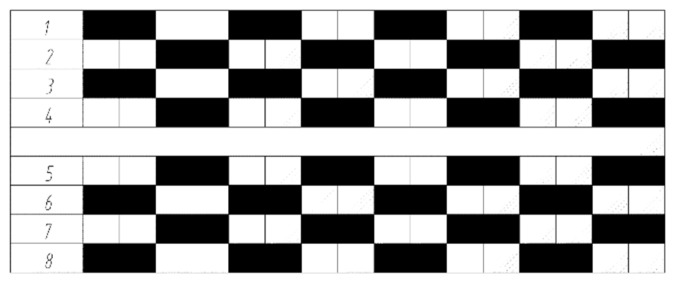 Figure 16
Figure 16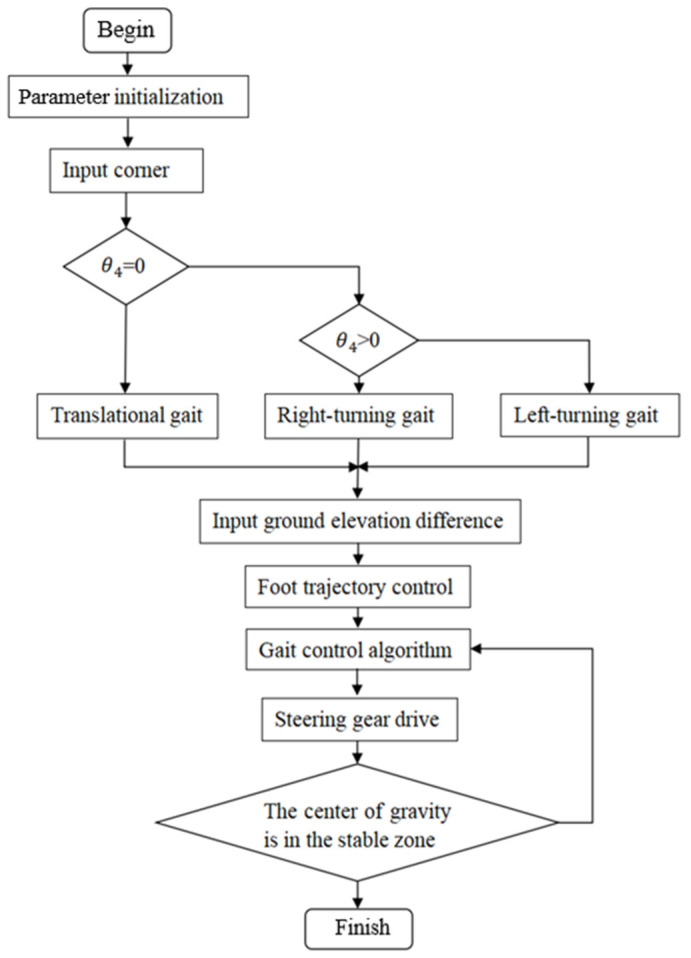 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35 Figure 36
Figure 36Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Prosthetics and Rehabilitation Robotics · Robotic Path Planning Algorithms