Multi-Robot Path Planning for High-Density Parking Environments Considering Efficiency and Fairness
Jinhyuk Lee, Woojin Chung

TL;DR
This paper introduces a multi-robot parking system that balances efficiency and fairness to handle high-density airport parking demands.
Contribution
A novel multi-robot path planning method that dynamically adjusts priorities to ensure both efficiency and fairness in parking operations.
Findings
The proposed method achieves a throughput exceeding 41 vehicles per hour.
The system maintains acceptable fairness while meeting peak-season parking demands.
A simulator validated the approach using real-world airport parking data.
Abstract
As parking congestion at airport parking lots intensifies, high-density parking (HDP) systems with multiple parking robots are gaining attention for improving operational efficiency. However, conventional multi-agent pathfinding (MAPF) methods primarily focus on overall efficiency improvement, often neglecting the priority of individual parking tasks. Additionally, these methods assume robots are ideal agents, resulting in physically infeasible paths for parking robots. We propose a multi-robot path planning approach that balances efficiency and priority. The proposed method improves priority-based search (PBS) by dynamically adjusting priorities, thereby ensuring both operational efficiency and priority of individual vehicles. A simulator replicating a real airport parking environment with 100 parking slots and parking robots under development was implemented to validate the approach.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
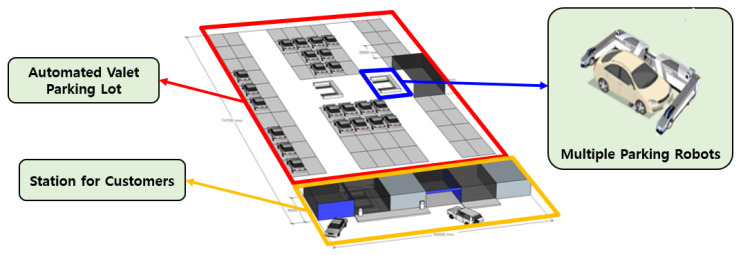 Figure 1
Figure 1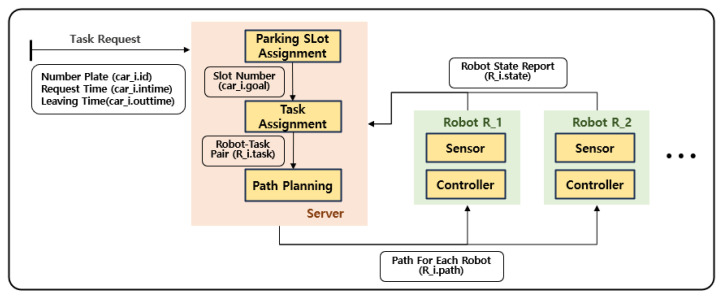 Figure 2
Figure 2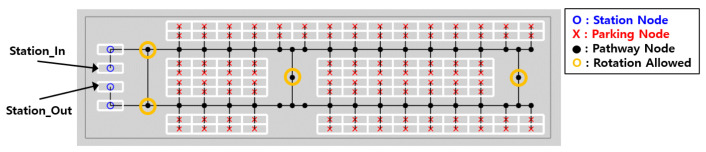 Figure 3
Figure 3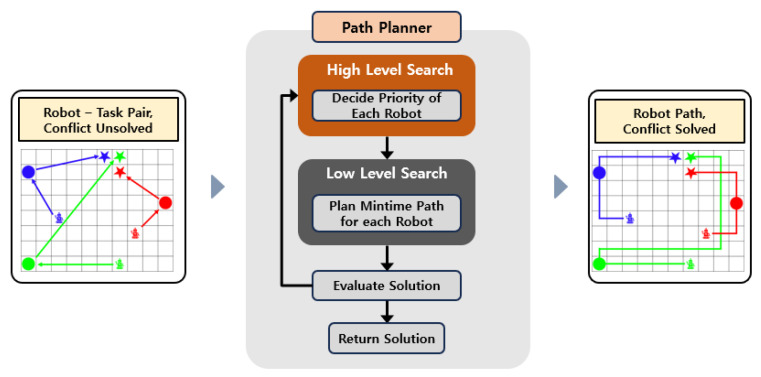 Figure 4
Figure 4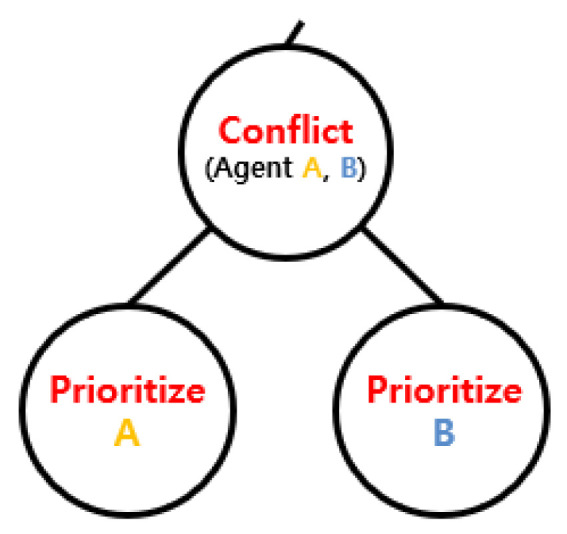 Figure 5
Figure 5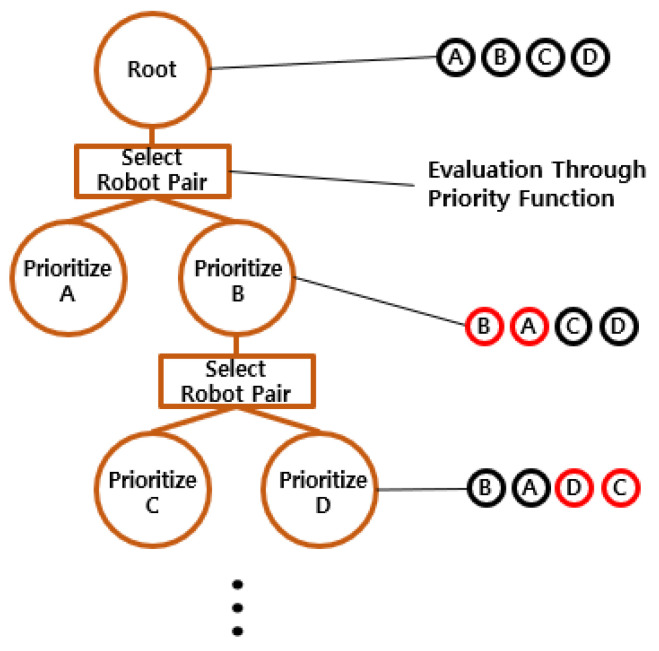 Figure 6
Figure 6 Figure 7
Figure 7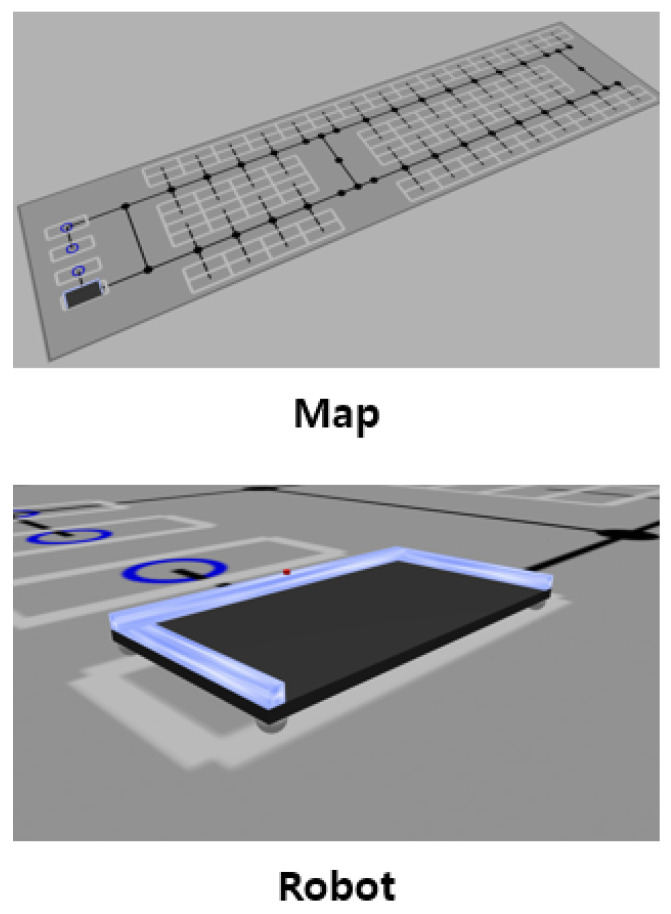 Figure 8
Figure 8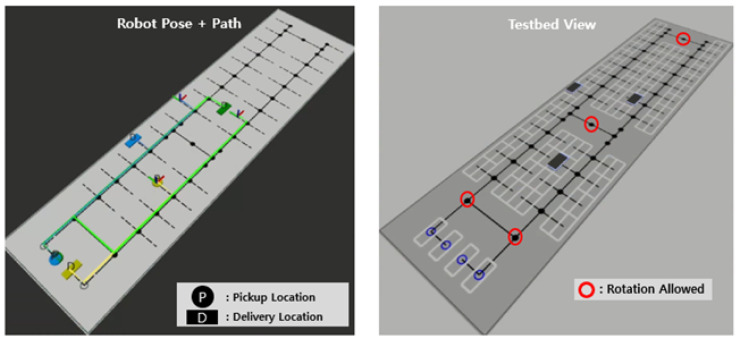 Figure 9
Figure 9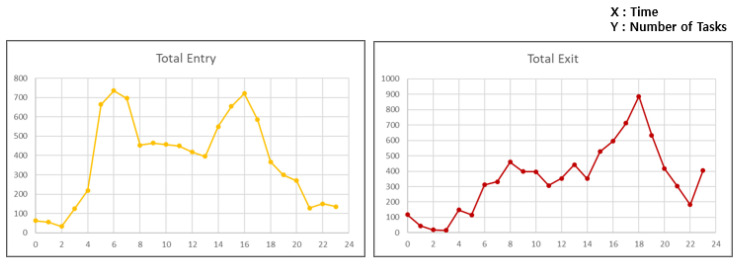 Figure 10
Figure 10 Figure 11
Figure 11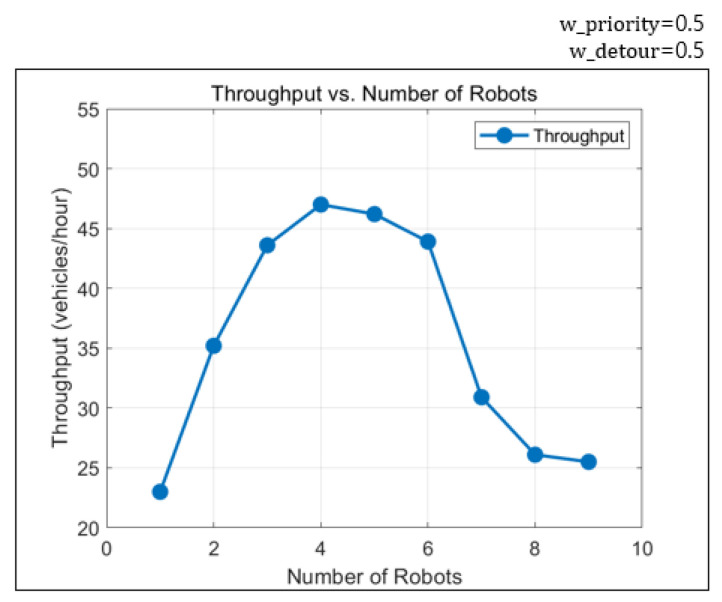 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSmart Parking Systems Research · Robotic Path Planning Algorithms · Traffic control and management