Dynamic Path Planning for Unmanned Autonomous Vehicles Based on CAS-UNet and Graph Neural Networks
Yuchu Ji, Rentong Sun, Yang Wang, Zijian Zhu, Zhenghao Liu

TL;DR
This paper introduces a new model for path planning in dynamic environments using CAS-UNet and GNN, achieving high success rates and efficiency for multi-agent vehicles.
Contribution
The novel CAS-GNN model integrates CAS-UNet and GNN with dynamic edge modules for improved obstacle recognition and adaptability.
Findings
CAS-GNN achieved a 92.8% success rate in dynamic scenarios with six vehicles.
The model reduced the collision rate by 23% compared to the A-GNN model.
Trajectory efficiency improved by 8% with CAS-GNN over traditional methods.
Abstract
This paper proposes a deeply integrated model called CAS-GNN, aiming to solve the collaborative path-planning problem for multi-agent vehicles operating in dynamic environments. Our proposed model integrates CAS-UNet and Graph Neural Network (GNN), and, by introducing a dynamic edge enhancement module and a dynamic edge weight update module, it improves the accuracy of obstacle boundary recognition in complex scenarios and adaptively changes the influence of different edges during the information transmission process. We generate data through online trajectory optimization to enhance the model’s adaptability to dynamic environments. Simulation results show that our proposed CAS-GNN model has good performance in path planning. In a dynamic scenario involving six vehicles, our model achieved a success rate of 92.8%, a collision rate of 0.0836%, and a trajectory efficiency of 64%. Compared…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
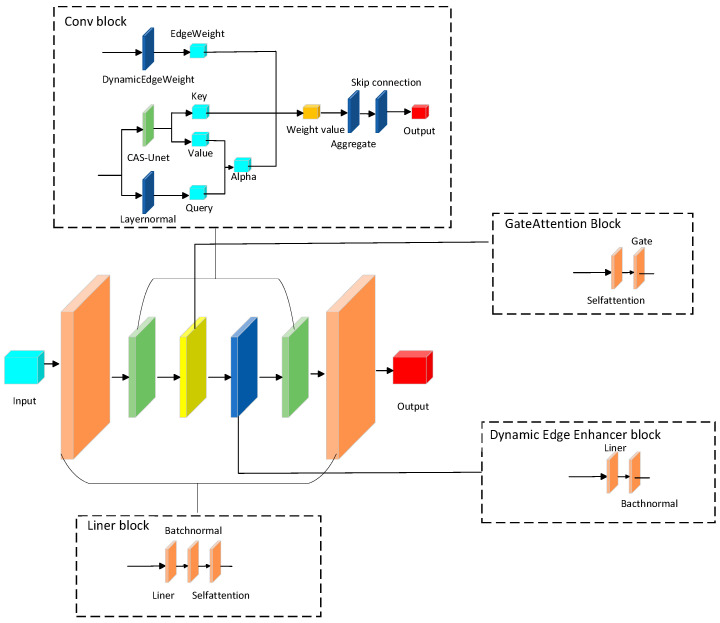 Figure 1
Figure 1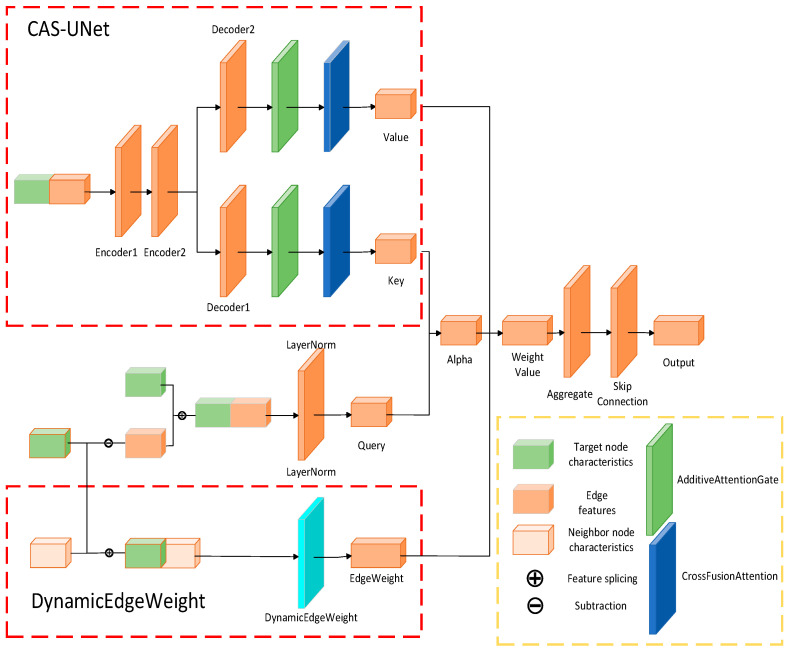 Figure 2
Figure 2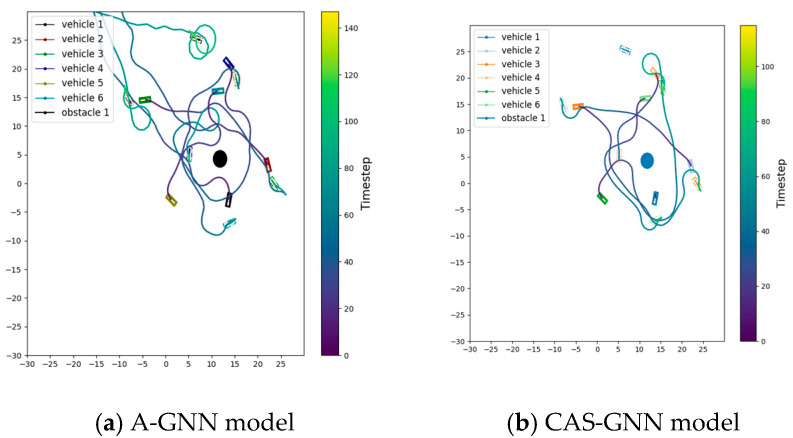 Figure 3
Figure 3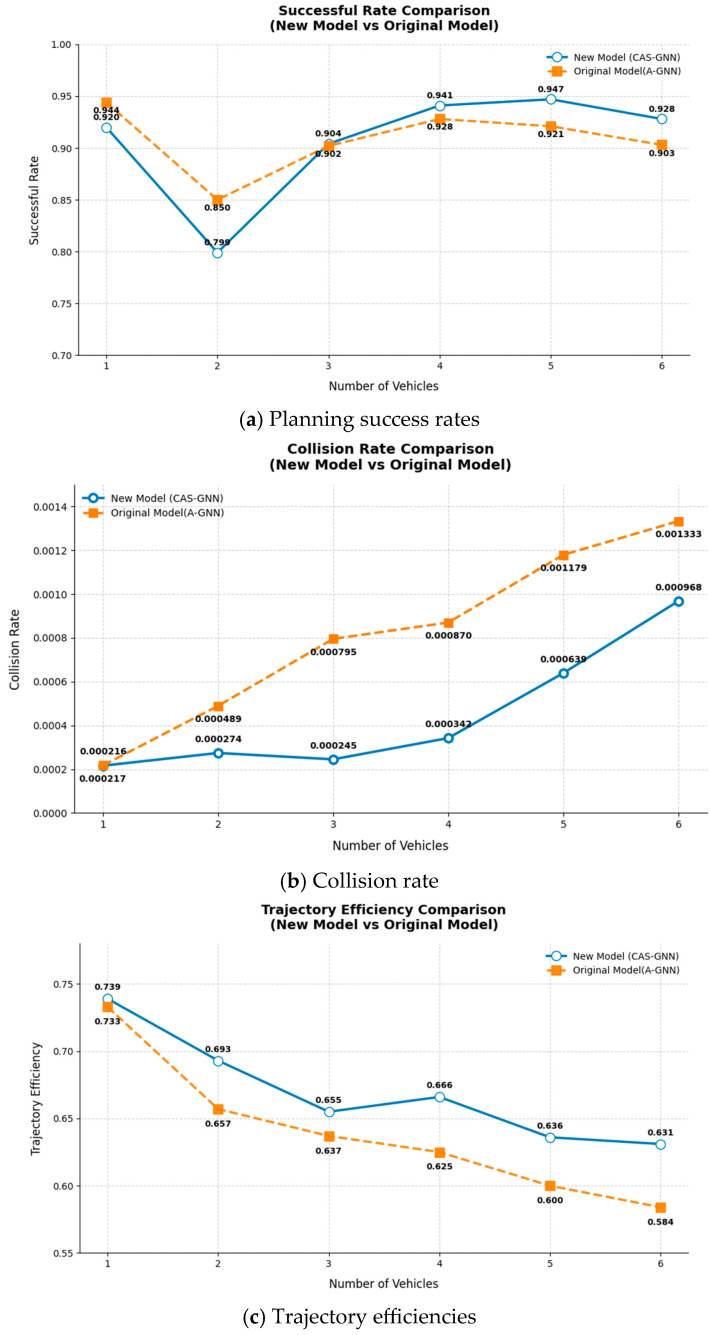 Figure 4
Figure 4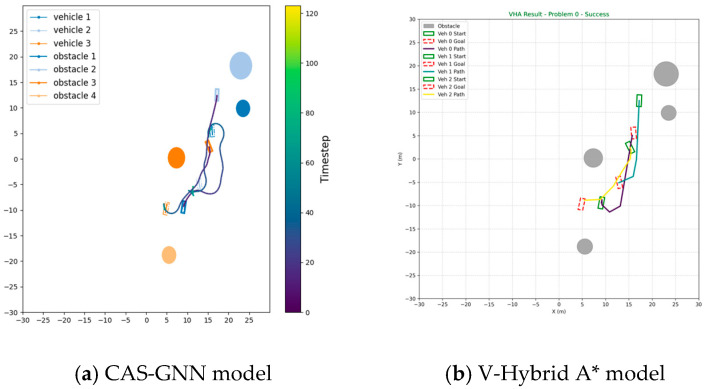 Figure 5
Figure 5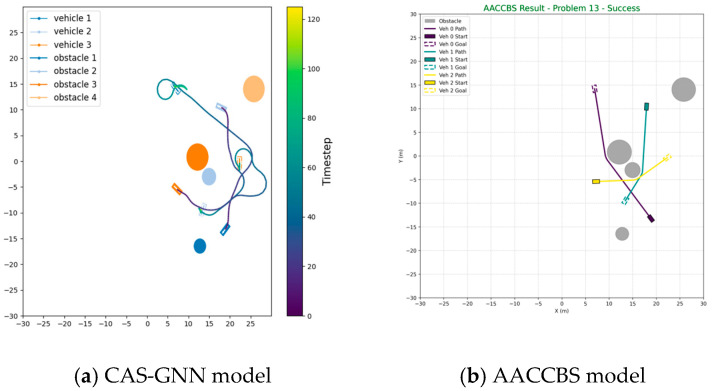 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Autonomous Vehicle Technology and Safety · Advanced Neural Network Applications