Finite-time fault-tolerant tracking control for a QUAV with mixed faults and external disturbances based on adaptive global fast terminal sliding mode neural network control method
Xiyu Zhang, Chun Feng, Youjun Zhou, Xiongfeng Deng

TL;DR
This paper presents a new control method for quadcopters to handle faults and disturbances, ensuring accurate tracking in a short time.
Contribution
A novel adaptive global fast terminal sliding mode neural network control method for QUAVs with mixed faults and disturbances.
Findings
The proposed control method ensures finite-time convergence of tracking errors to near zero.
The QUAV system's position and attitude tracking is validated through an actual system test.
Adaptive laws effectively estimate unknown parameters and disturbances.
Abstract
This paper addresses the finite-time tracking control problem for a class of quadrotor unmanned aerial vehicle (QUAV) subject to unknown mixed faults and external disturbances. The considered mixed faults include both input quantization and actuator faults. First, radial basis function neural networks (RBFNNs) are employed to approximate the unknown nonlinear dynamics of the QUAV system, with adaptive control laws designed for online weights updates. Second, since the neural network approximation errors and external disturbances can be treated as unknown but bounded constants, adaptive control laws are developed to estimate these parameters. Third, to address the design complexity caused by unknown control coefficients arising from mixed faults, a Nussbaum gain function is introduced. Subsequently, based on the designed global fast terminal sliding mode (GFTSM) functions, adaptive GFTSM…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
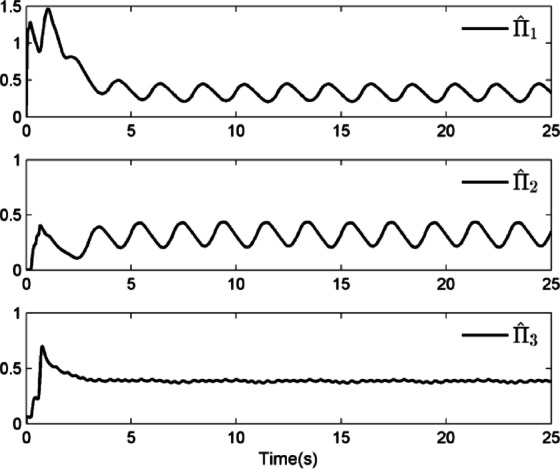 Figure 10
Figure 10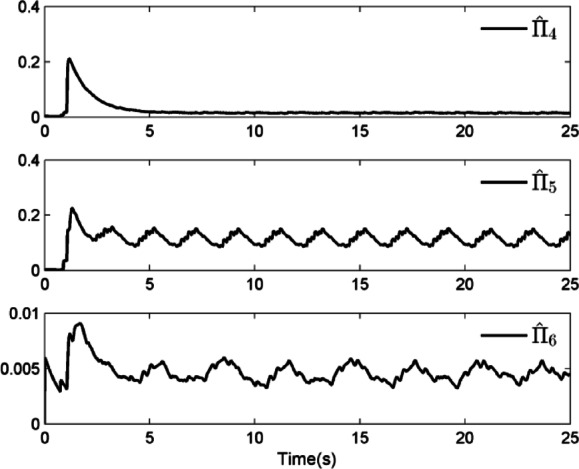 Figure 11
Figure 11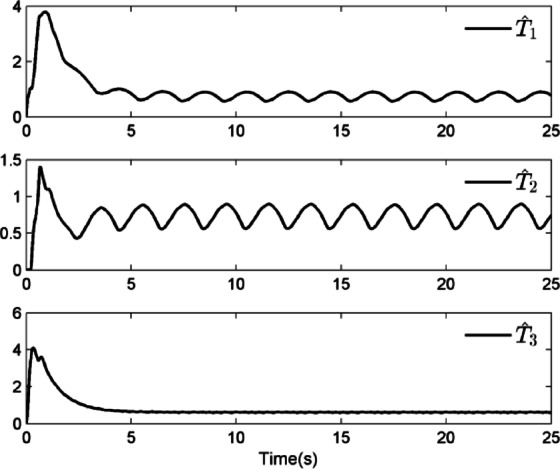 Figure 12
Figure 12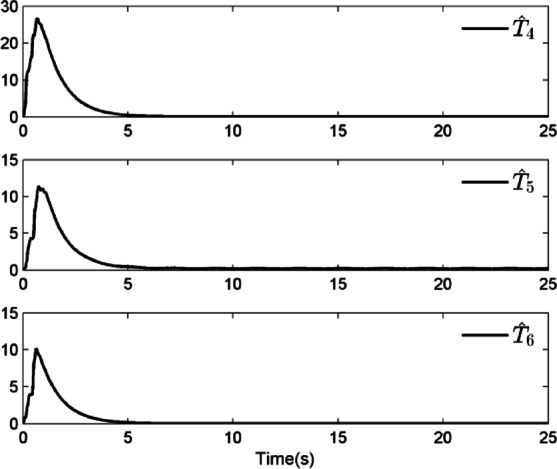 Figure 13
Figure 13 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4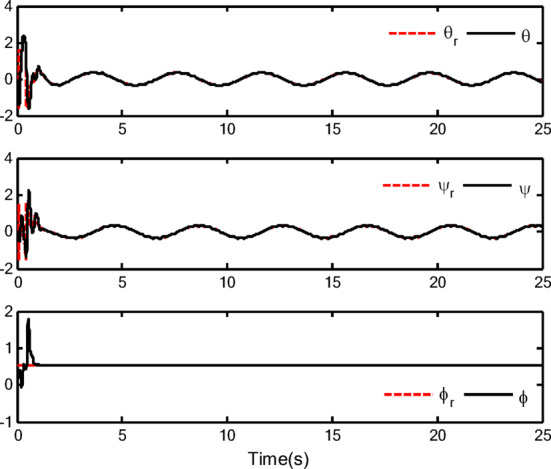 Figure 5
Figure 5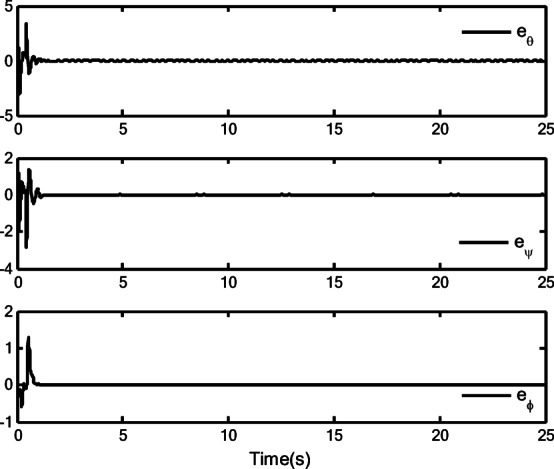 Figure 6
Figure 6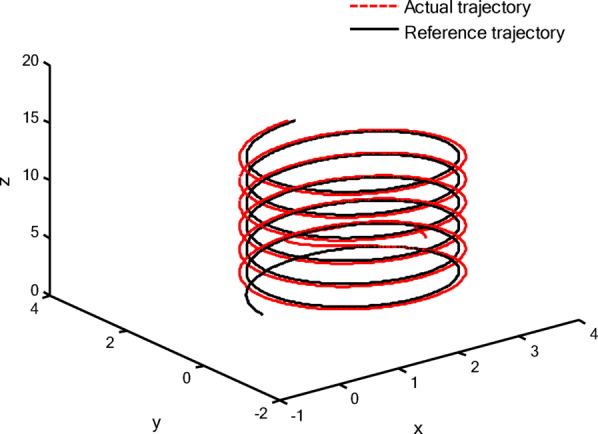 Figure 7
Figure 7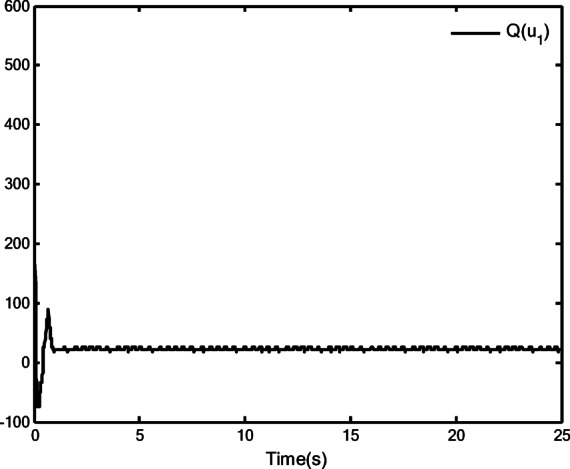 Figure 8
Figure 8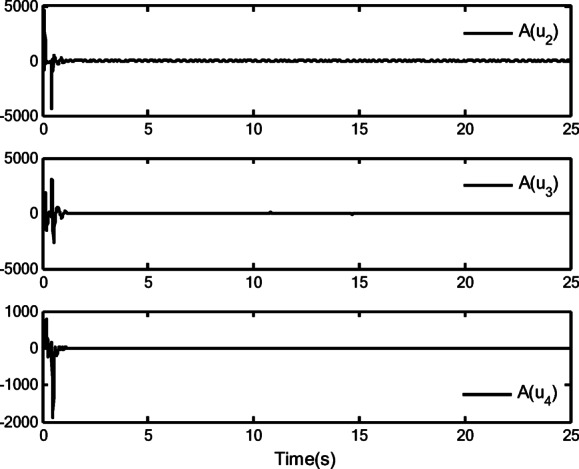 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdaptive Control of Nonlinear Systems · Adaptive Dynamic Programming Control · Distributed Control Multi-Agent Systems