Approach to Semantic Visual SLAM for Bionic Robots Based on Loop Closure Detection with Combinatorial Graph Entropy in Complex Dynamic Scenes
Dazheng Wang, Jingwen Luo

TL;DR
This paper introduces a new visual SLAM method for bionic robots that improves accuracy in dynamic environments using semantic information and graph entropy.
Contribution
A novel semantic visual SLAM algorithm with loop closure detection using combinatorial graph entropy and dynamic feature filtering.
Findings
The proposed method achieves higher precision and recall in loop closure detection than the BoW model.
Trajectory accuracy improved by 97.01% over ORB-SLAM2 in high-dynamic sequences.
Keyframe extraction was reduced by 61.20% while maintaining performance.
Abstract
In complex dynamic environments, the performance of SLAM systems on bionic robots is susceptible to interference from dynamic objects or structural changes in the environment. To address this problem, we propose a semantic visual SLAM (vSLAM) algorithm based on loop closure detection with combinatorial graph entropy. First, in terms of the dynamic feature detection results of YOLOv8-seg, the feature points at the edges of the dynamic object are finely judged by calculating the mean absolute deviation (MAD) of the depth of the pixel points. Then, a high-quality keyframe selection strategy is constructed by combining the semantic information, the average coordinates of the semantic objects, and the degree of variation in the dense region of feature points. Subsequently, the unweighted and weighted graphs of keyframes are constructed according to the distribution of feature points,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
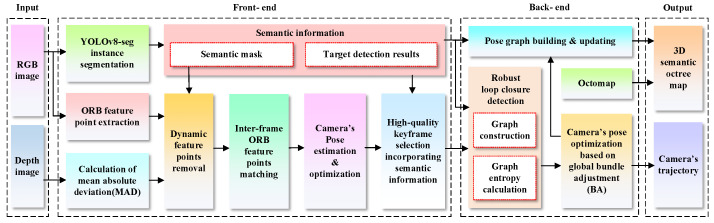 Figure 1
Figure 1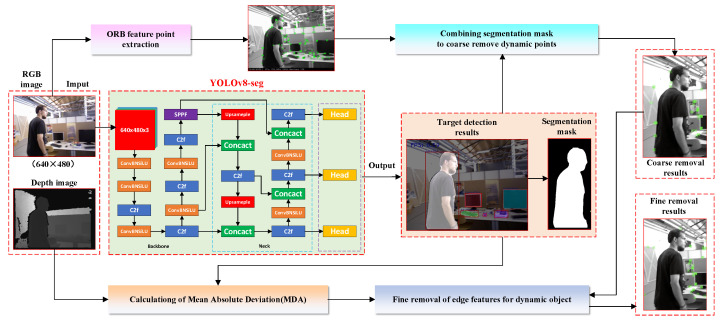 Figure 2
Figure 2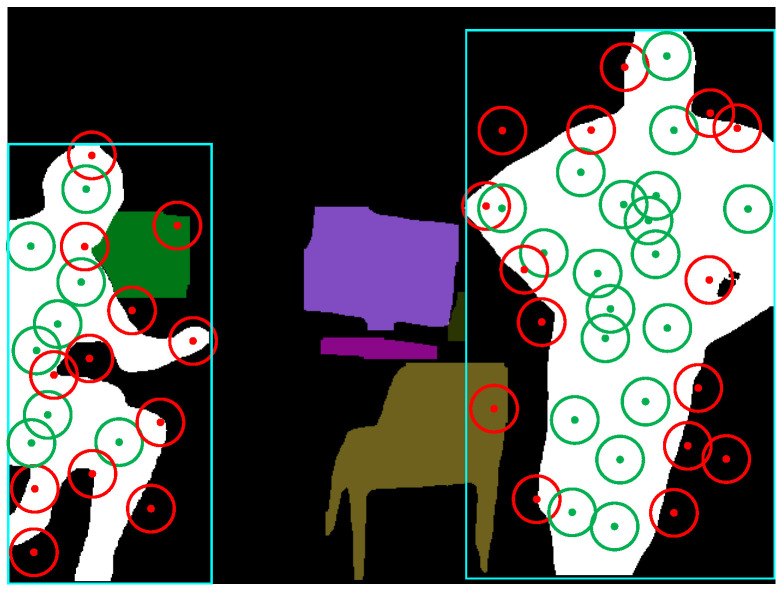 Figure 3
Figure 3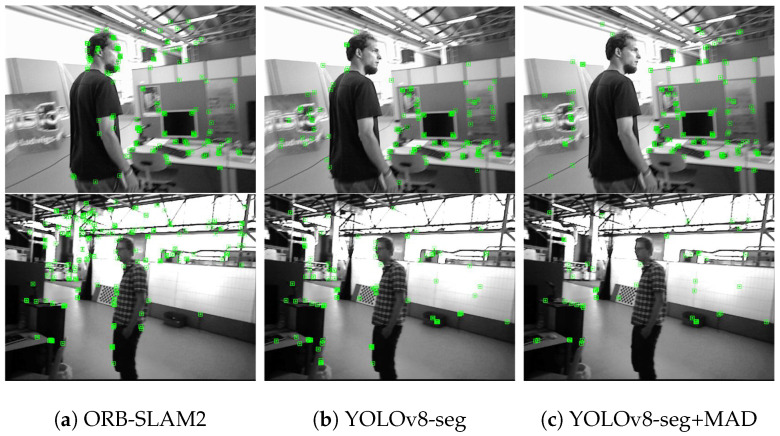 Figure 4
Figure 4 Figure 5
Figure 5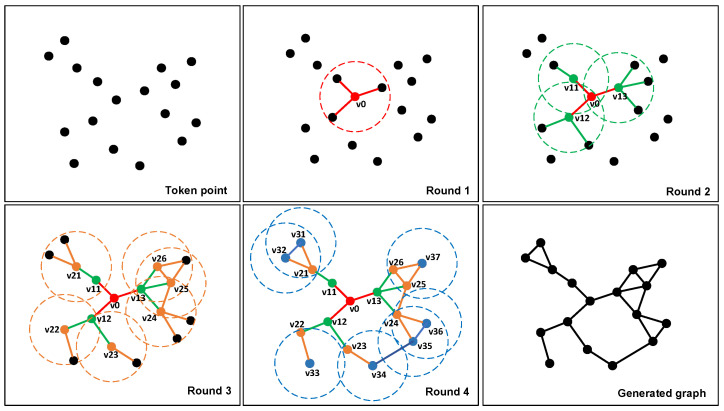 Figure 6
Figure 6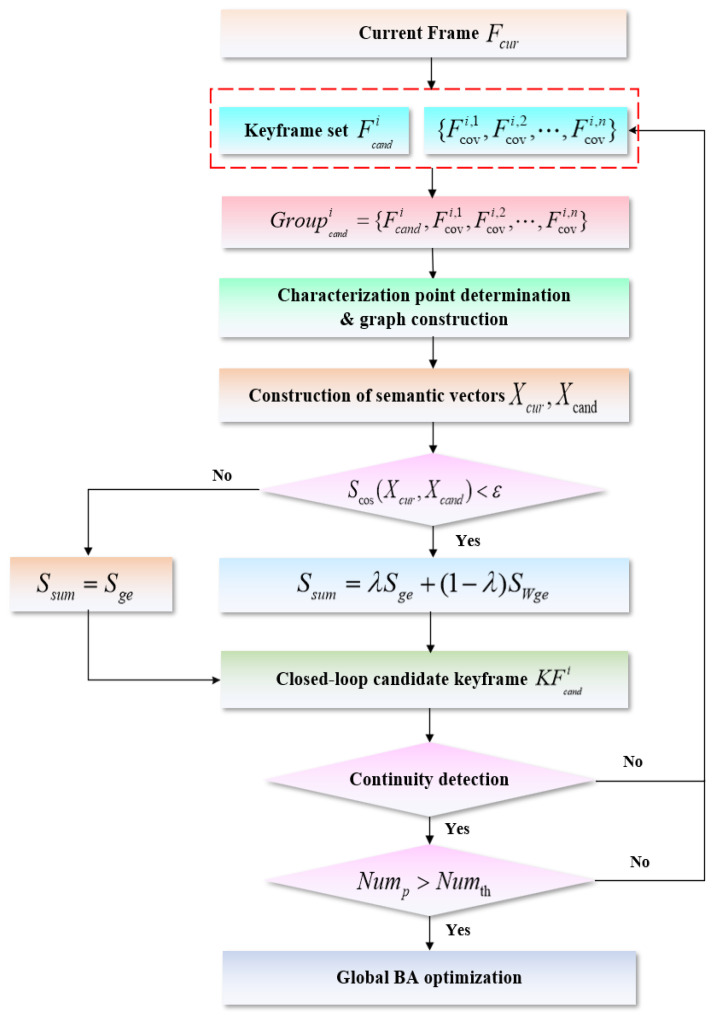 Figure 7
Figure 7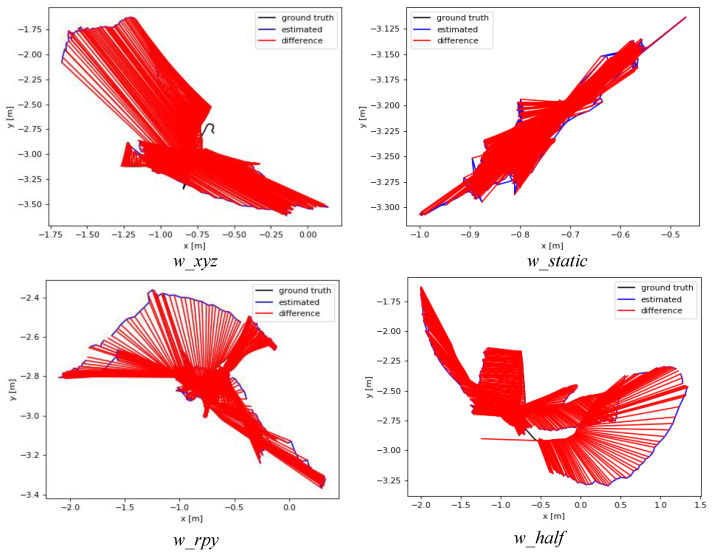 Figure 8
Figure 8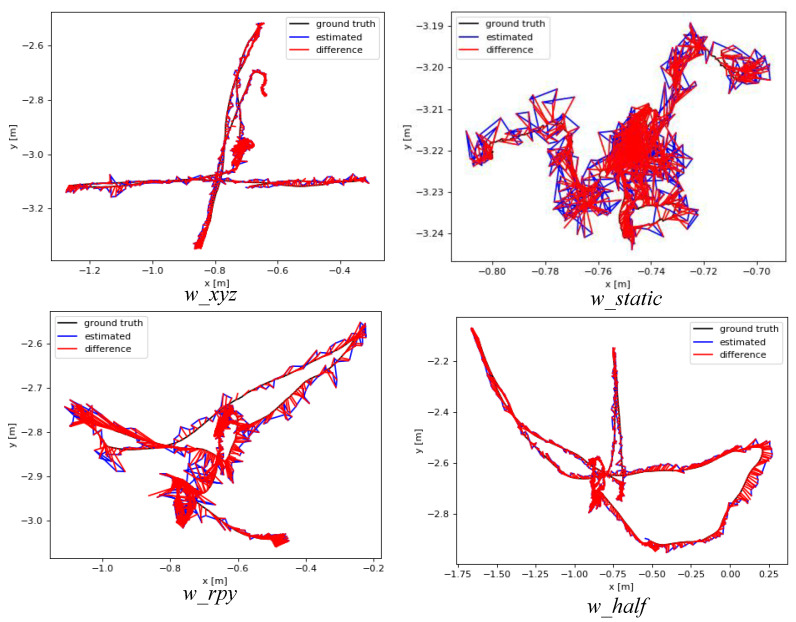 Figure 9
Figure 9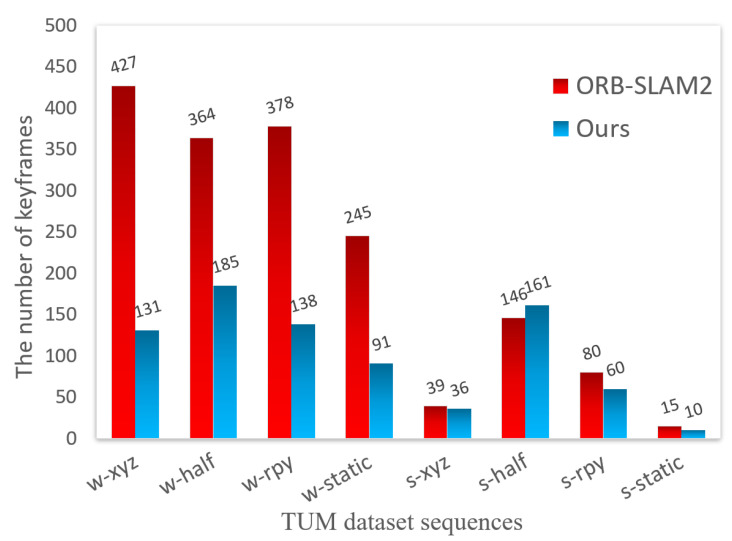 Figure 10
Figure 10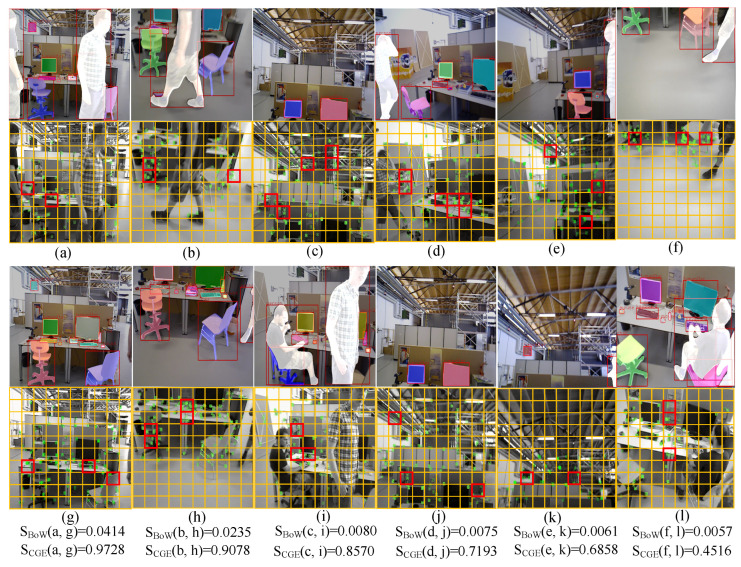 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17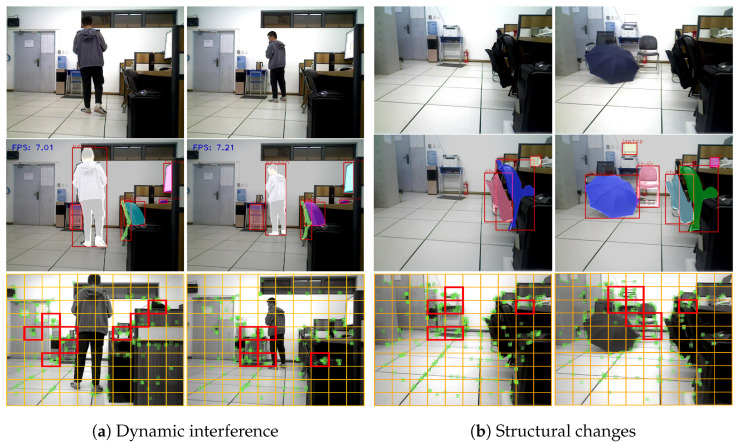 Figure 18
Figure 18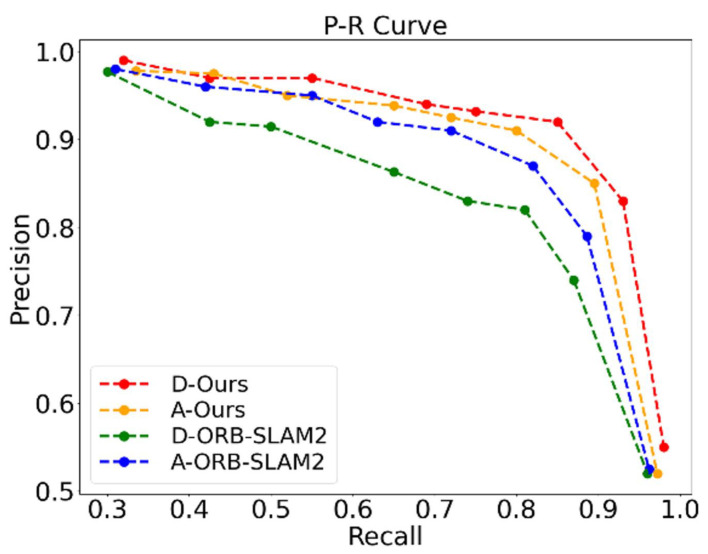 Figure 19
Figure 19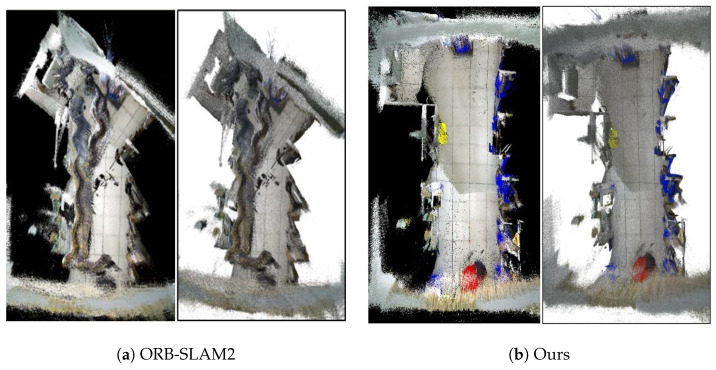 Figure 20
Figure 20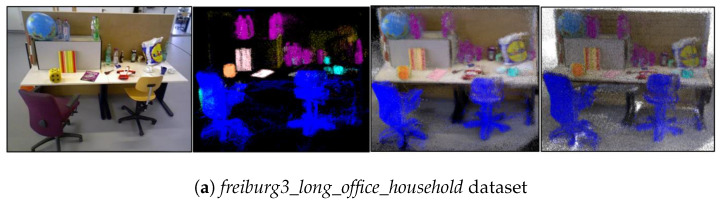 Figure 21
Figure 21 Figure 22
Figure 22Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Robotic Path Planning Algorithms · Modular Robots and Swarm Intelligence