Application of Multi-Strategy Controlled Rime Algorithm in Path Planning for Delivery Robots
Haokai Lv, Qian Qian, Jiawen Pan, Miao Song, Yong Feng, Yingna Li

TL;DR
This paper introduces an improved RIME algorithm for delivery robot path planning, enhancing efficiency and reducing costs through multi-strategy optimization.
Contribution
The novel Multi-Strategy Controlled Rime Algorithm (MSRIME) improves path planning by addressing global exploration, diversity, and step size issues in the standard RIME algorithm.
Findings
MSRIME outperforms standard algorithms in optimization capability, convergence speed, and stability.
The algorithm effectively suppresses the impact of coordinate and dimensional differences on path quality.
MSRIME shows superior performance in path length, running time, and smoothness across various scenarios.
Abstract
As a core component of automated logistics systems, delivery robots hold significant application value in the field of unmanned delivery. This research addresses the robot path planning problem, aiming to enhance delivery efficiency and reduce operational costs through systematic improvements to the RIME optimization algorithm. Through in-depth analysis, we identified several major drawbacks in the standard RIME algorithm for path planning: insufficient global exploration capability in the initial stages, a lack of diversity in the hard RIME search mechanism, and oscillatory phenomena in soft RIME step size adjustment. These issues often lead to undesirable phenomena in path planning, such as local optima traps, path redundancy, or unsmooth trajectories. To address these limitations, this study proposes the Multi-Strategy Controlled Rime Algorithm (MSRIME), whose innovation primarily…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12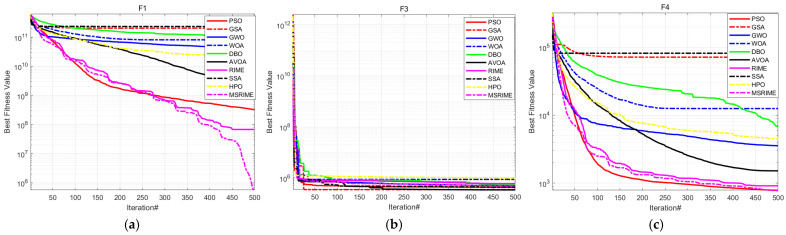 Figure 13
Figure 13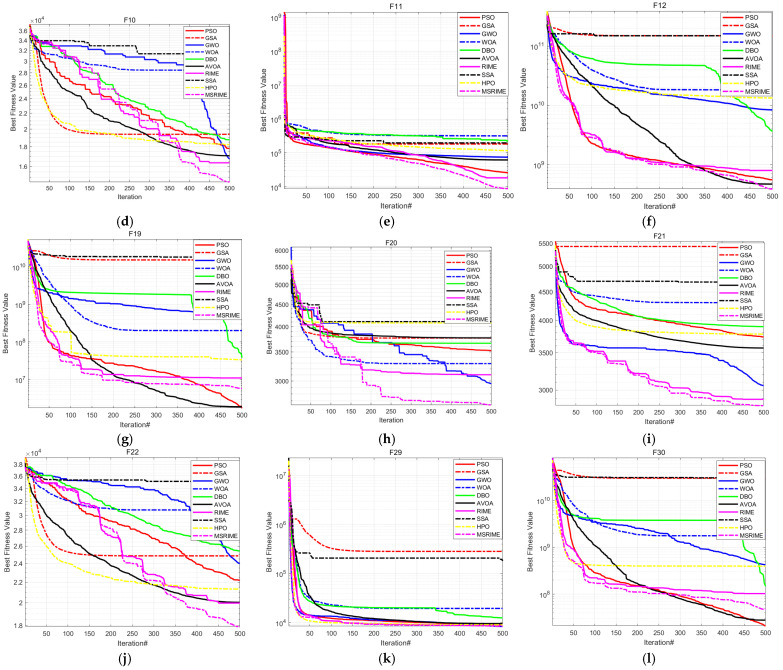 Figure 14
Figure 14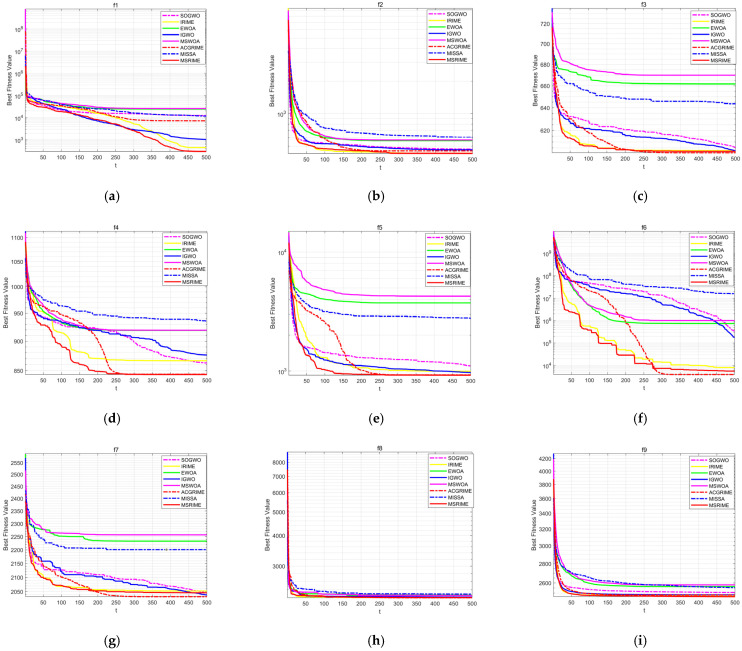 Figure 15
Figure 15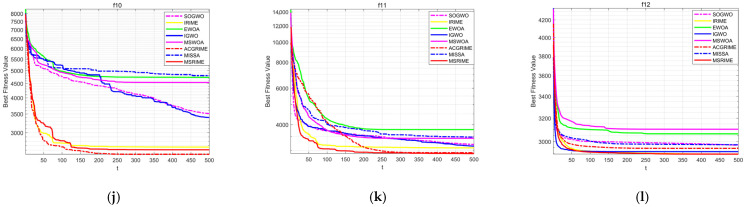 Figure 16
Figure 16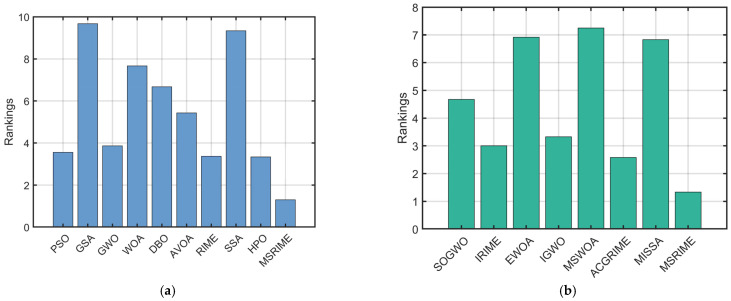 Figure 17
Figure 17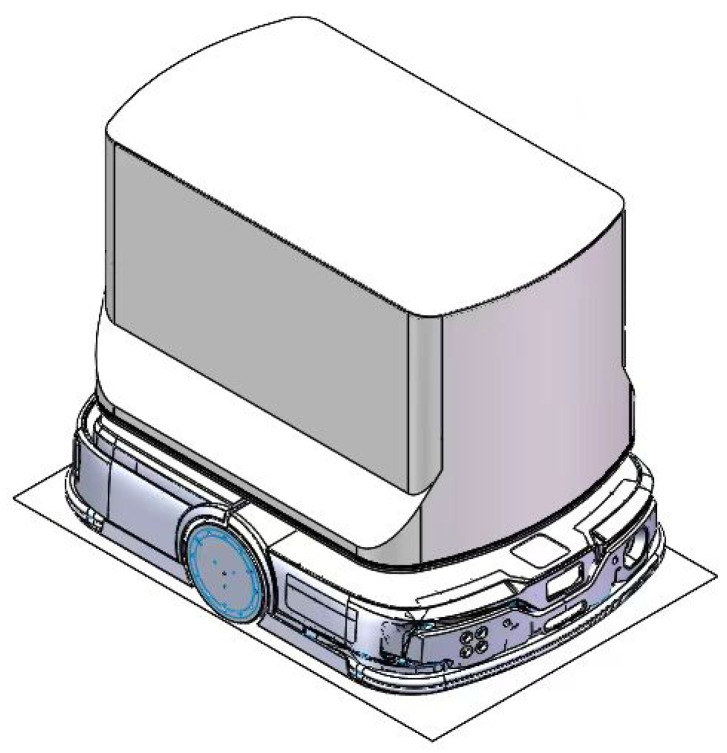 Figure 18
Figure 18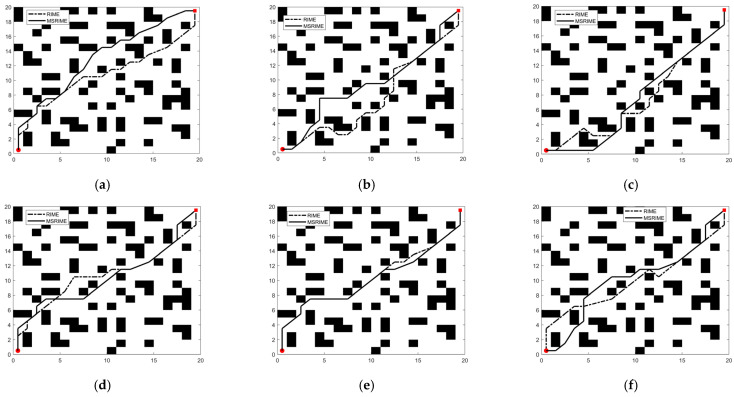 Figure 19
Figure 19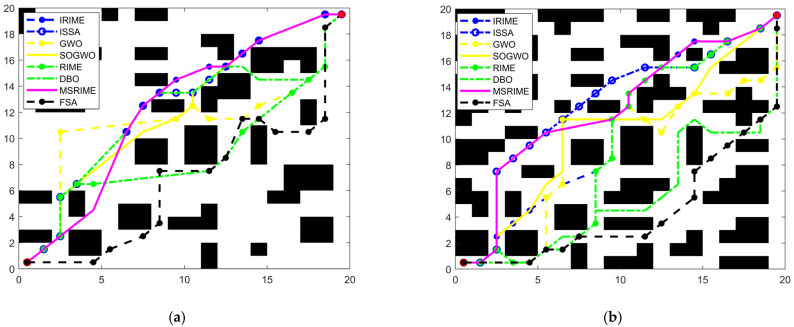 Figure 20
Figure 20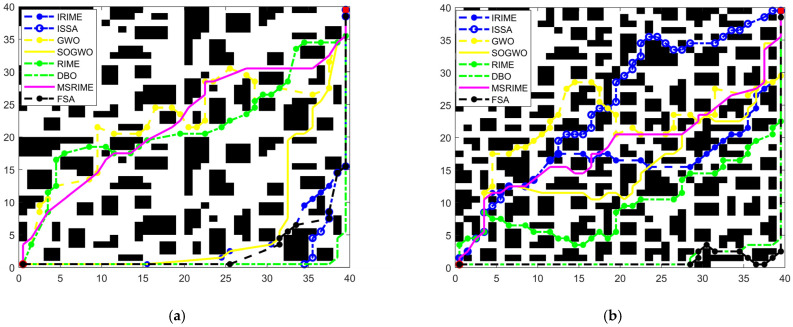 Figure 21
Figure 21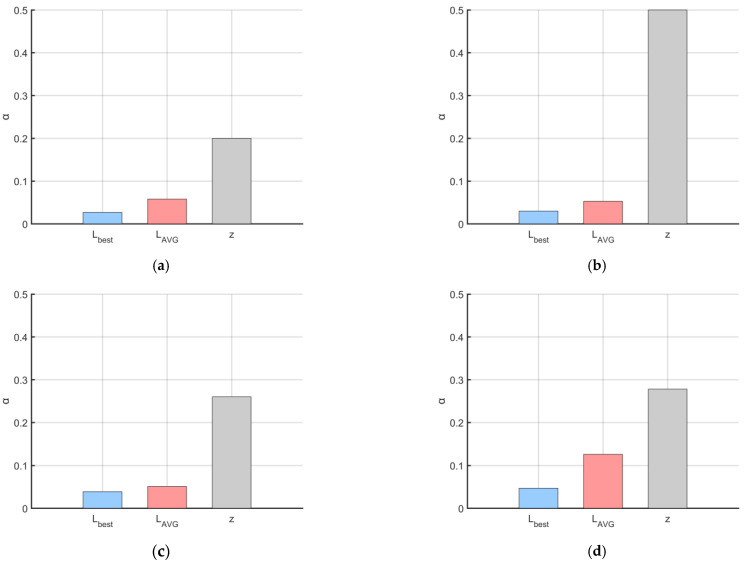 Figure 22
Figure 22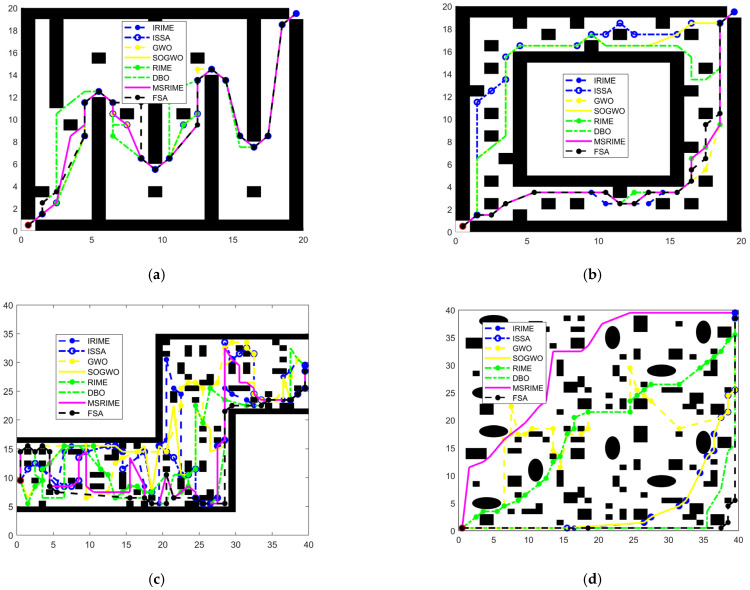 Figure 23
Figure 23Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Control and Dynamics of Mobile Robots · Robotics and Sensor-Based Localization