Rolling vs. Swing: A Strategy for Enhancing Locomotion Speed and Stability in Legged Robots
Yongjiang Xue, Wei Wang, Mingyu Duan, Nanqing Jiang, Shaoshi Zhang, Xuan Xiao

TL;DR
This paper introduces a new motion strategy for legged robots using rolling gaits to improve speed and stability while reducing energy use.
Contribution
A novel rolling gait strategy is proposed, demonstrated on a transformable quadruped robot called R-Taichi.
Findings
Rolling gait reduces specific resistance by up to 30% compared to swing gait.
R-Taichi achieves a top speed of 0.7 m/s with 22% lower RMSE than RHex mode.
The robot successfully navigates diverse terrains including gravel, grass, and 150 mm obstacles.
Abstract
Legged robots face inherent challenges in energy efficiency and stability at high speeds due to the repetitive acceleration–deceleration cycles of swing-based locomotion. To address these limitations, this paper presents a motion strategy that uses rolling gait instead of swing gait to improve the energy efficiency and stability. First, a wheel-legged quadruped robot, R-Taichi, is developed, which is capable of switching to legged, wheeled, and RHex mobile modes. Second, the mechanical structure of the transformable two-degree-of-freedom leg is introduced, and the kinematics is analyzed. Finally, experiments are conducted to generate wheeled, legged, and RHex motion in both swing and rolling gaits, and the energy efficiency is further compared. The experimental results show that the rolling motion can ensure stable ground contact and mitigate cyclic collisions, reducing specific…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
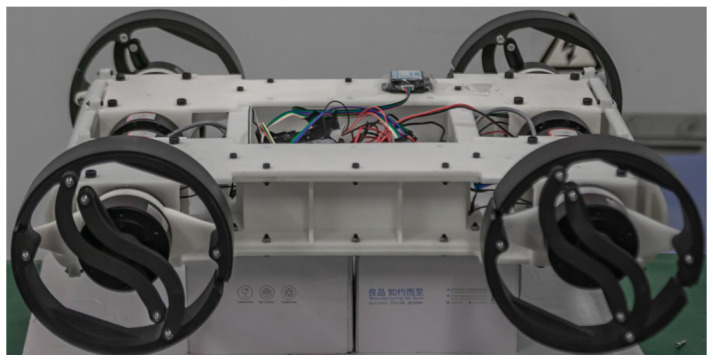 Figure 1
Figure 1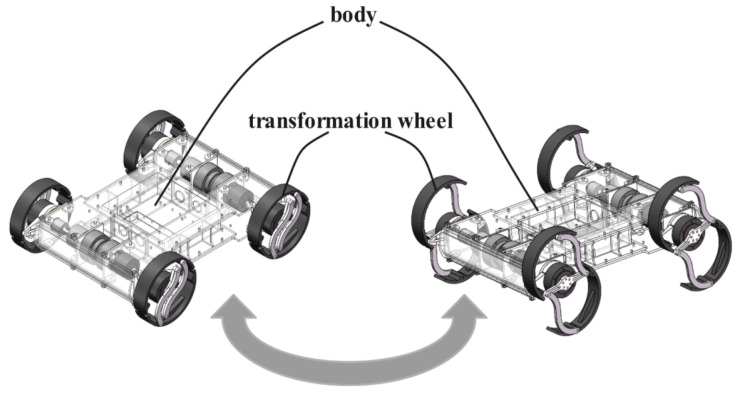 Figure 2
Figure 2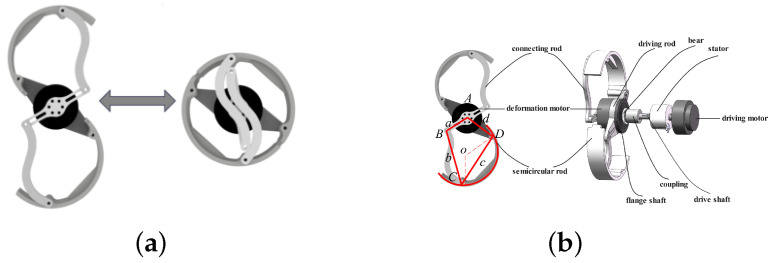 Figure 3
Figure 3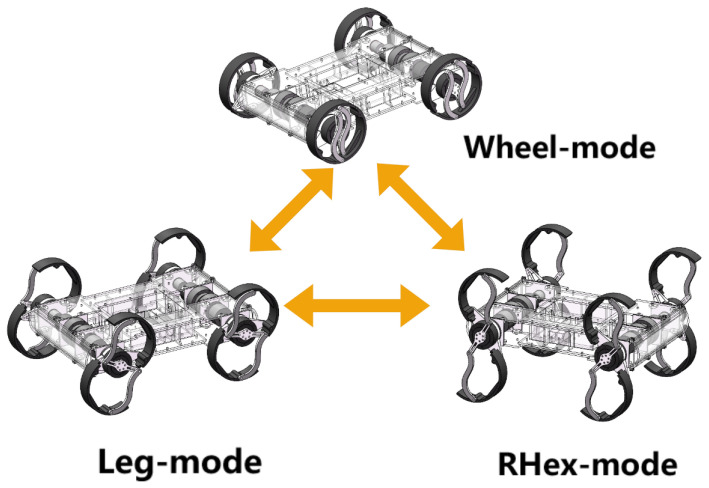 Figure 4
Figure 4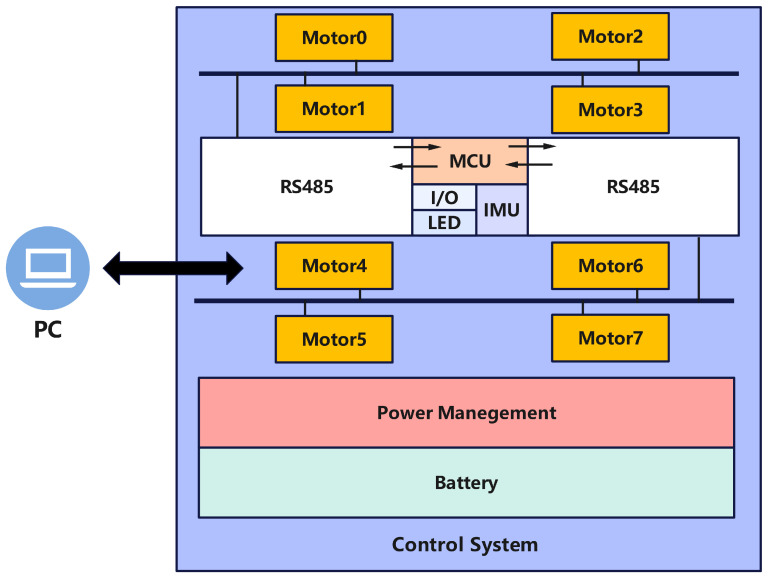 Figure 5
Figure 5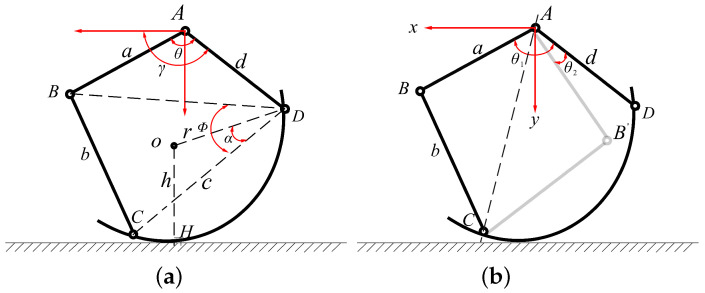 Figure 6
Figure 6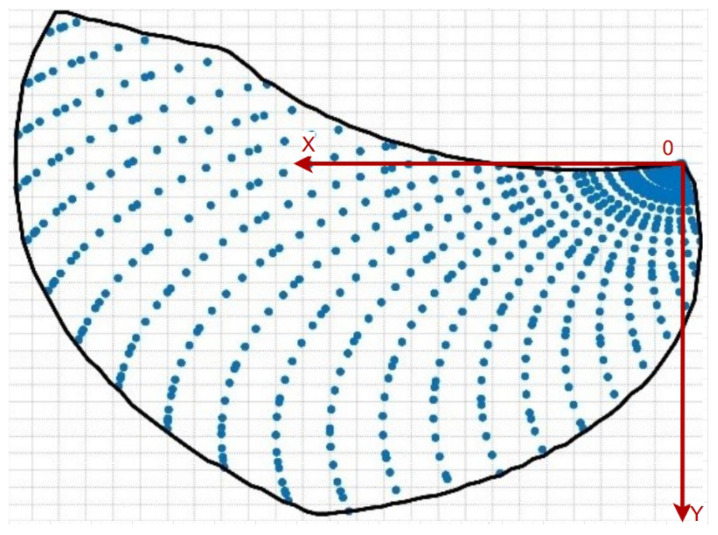 Figure 7
Figure 7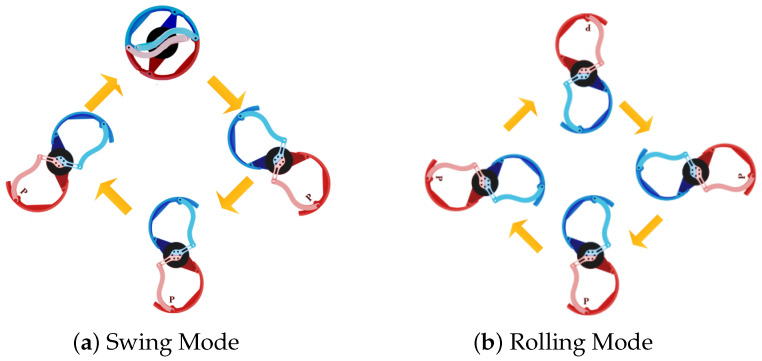 Figure 8
Figure 8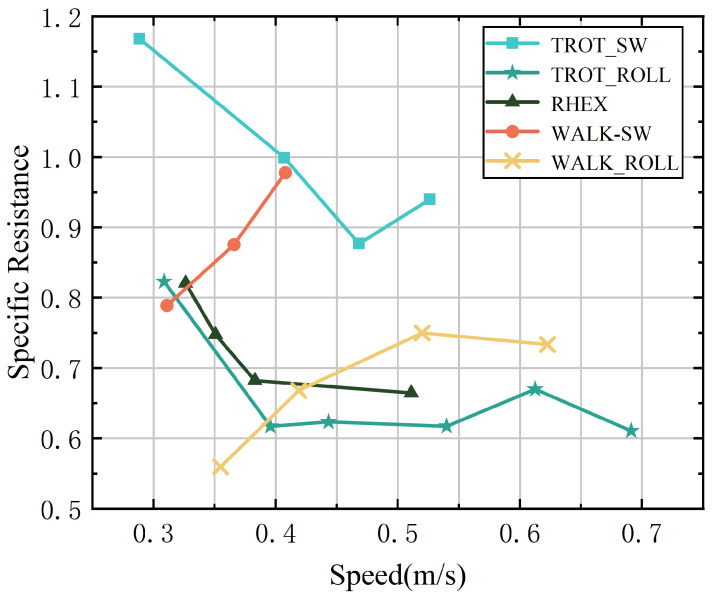 Figure 9
Figure 9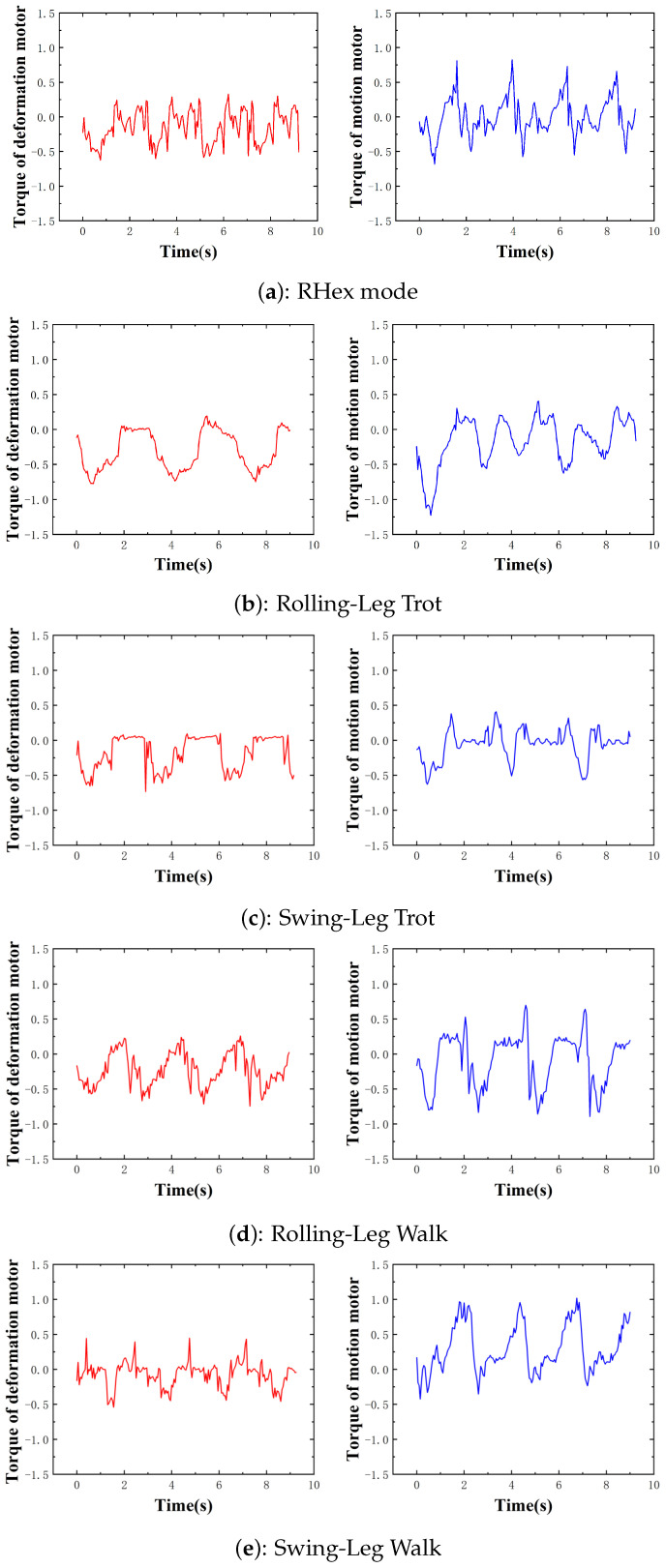 Figure 10
Figure 10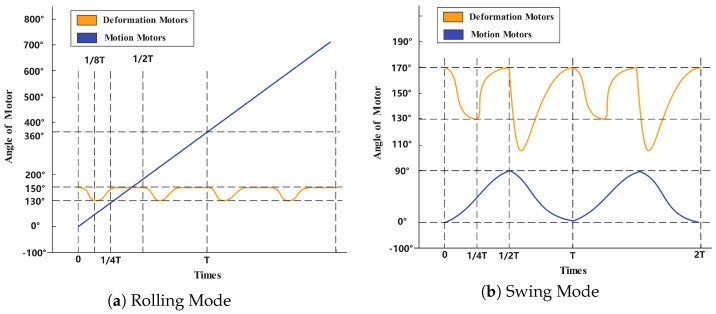 Figure 11
Figure 11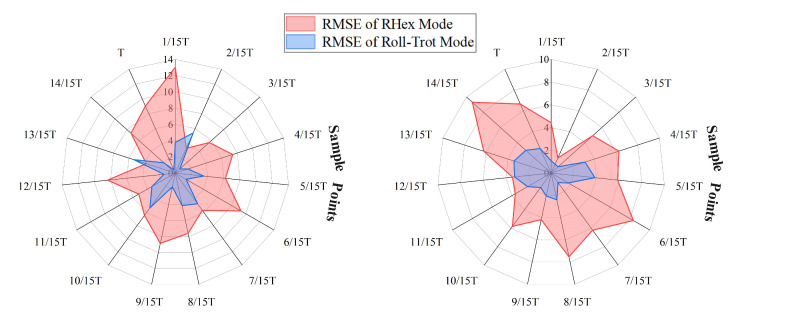 Figure 12
Figure 12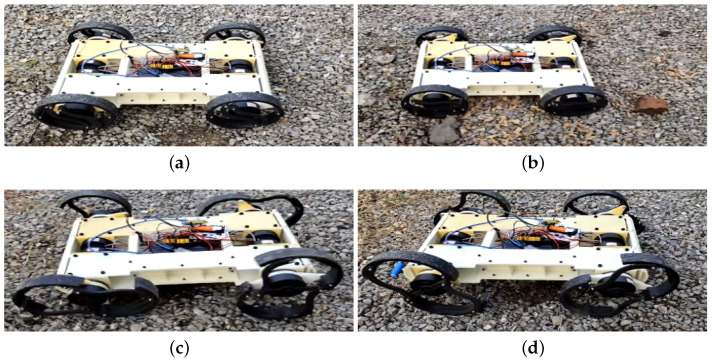 Figure 13
Figure 13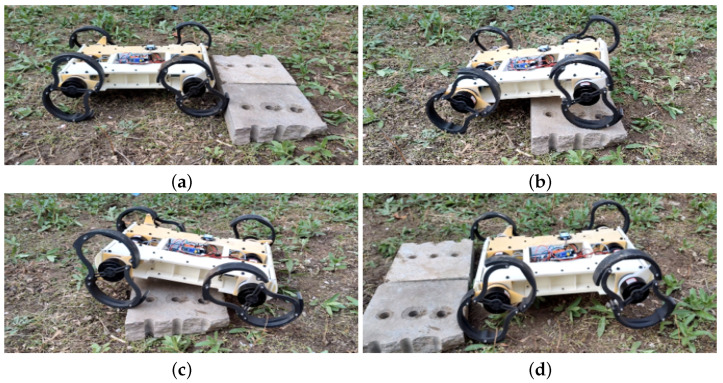 Figure 14
Figure 14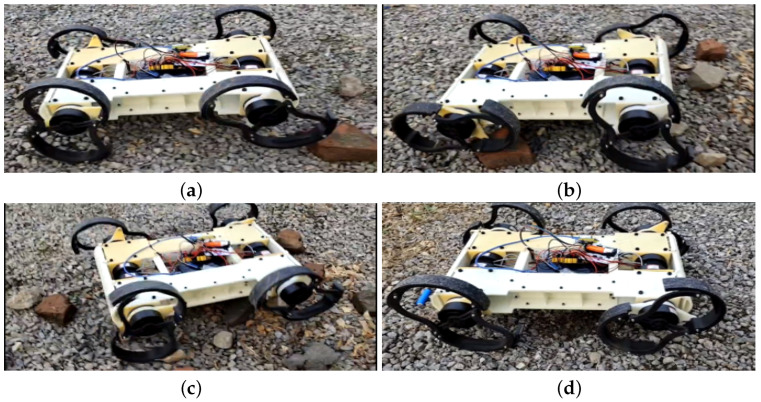 Figure 15
Figure 15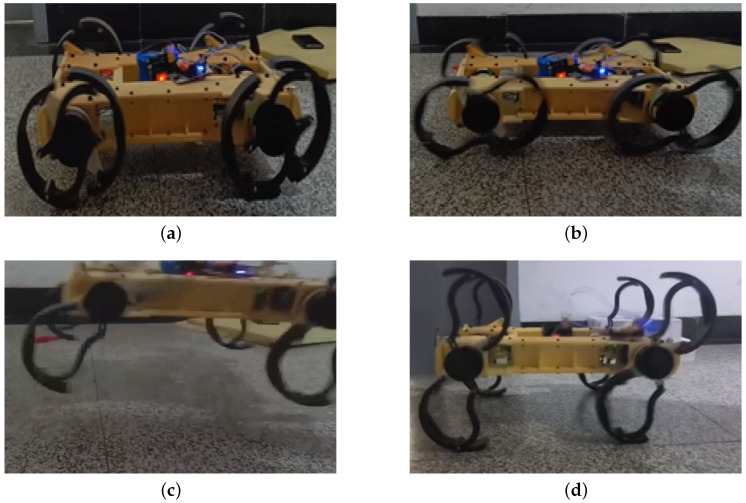 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Prosthetics and Rehabilitation Robotics · Robot Manipulation and Learning