Robust Visuomotor Control for Humanoid Loco-Manipulation Using Hybrid Reinforcement Learning
Chenzheng Wang, Qiang Huang, Xuechao Chen, Zeyu Zhang, Jing Shi

TL;DR
This paper introduces a new control framework for humanoid robots that improves visuomotor control in complex tasks like carrying loads and opening doors.
Contribution
The novel framework combines model-free and model-based reinforcement learning for efficient visuomotor control in humanoid loco-manipulation tasks.
Findings
The framework achieves an 83% success rate in loco-manipulation tasks like load carrying and door opening.
Mid-way initialization and prioritized experience sampling accelerate policy convergence in visuomotor control.
The method enables automatic robot motion adjustment in response to environmental changes.
Abstract
Loco-manipulation tasks using humanoid robots have great practical value in various scenarios. While reinforcement learning (RL) has become a powerful tool for versatile and robust whole-body humanoid control, visuomotor control in loco-manipulation tasks with RL remains a great challenge due to their high dimensionality and long-horizon exploration issues. In this paper, we propose a loco-manipulation control framework for humanoid robots that utilizes model-free RL upon model-based control in the robot’s tasks space. It implements a visuomotor policy with depth-image input, and uses mid-way initialization and prioritized experience sampling to accelerate policy convergence. The proposed method is validated on typical loco-manipulation tasks of load carrying and door opening resulting in an overall success rate of 83%, where our framework automatically adjusts the robot motion in…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
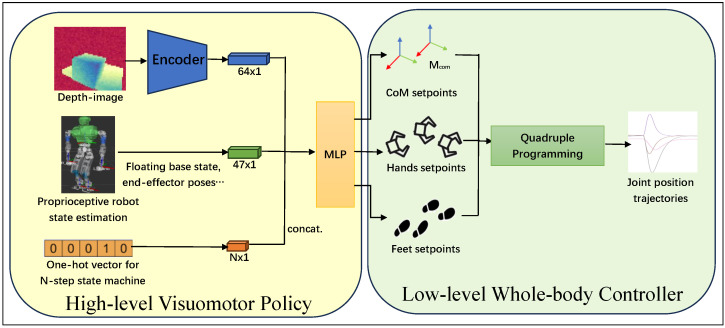 Figure 1
Figure 1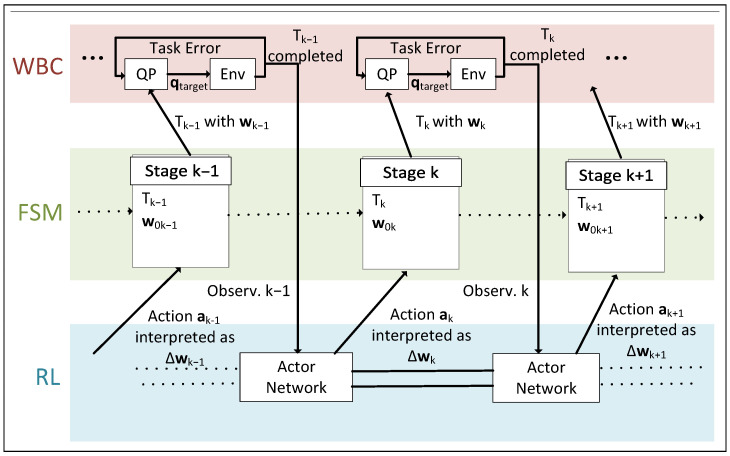 Figure 2
Figure 2 Figure 3
Figure 3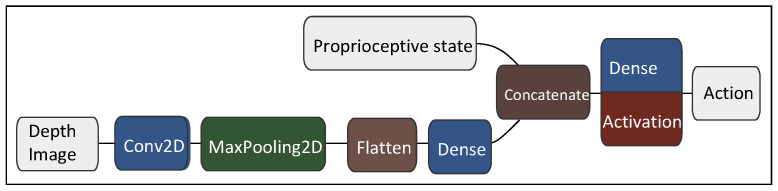 Figure 4
Figure 4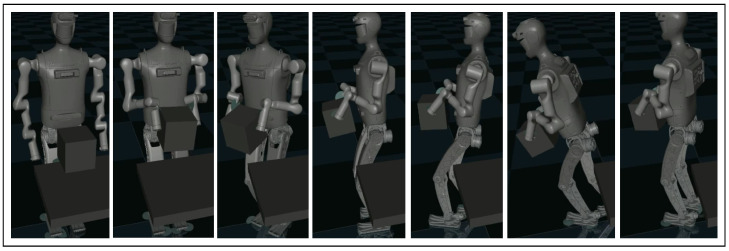 Figure 5
Figure 5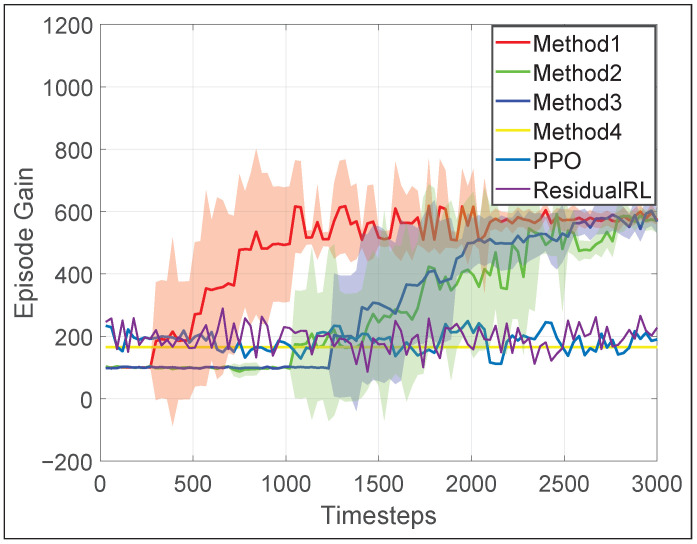 Figure 6
Figure 6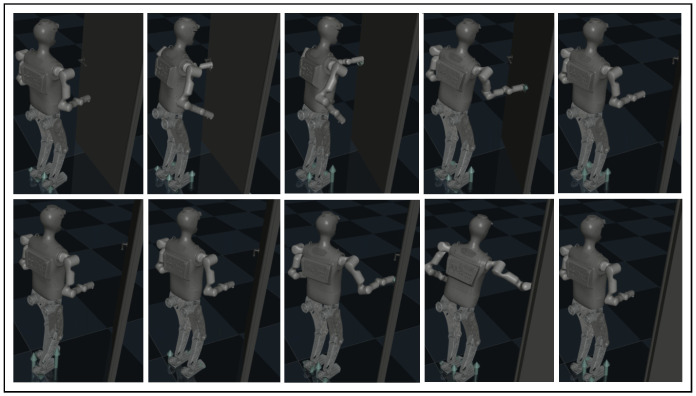 Figure 7
Figure 7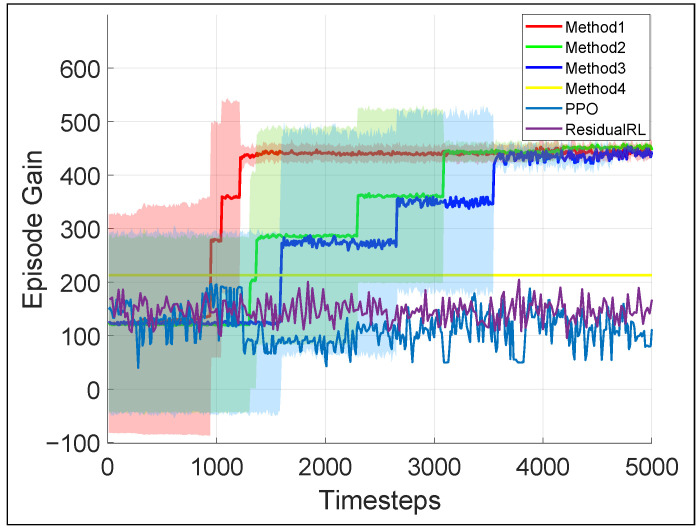 Figure 8
Figure 8 Figure 9
Figure 9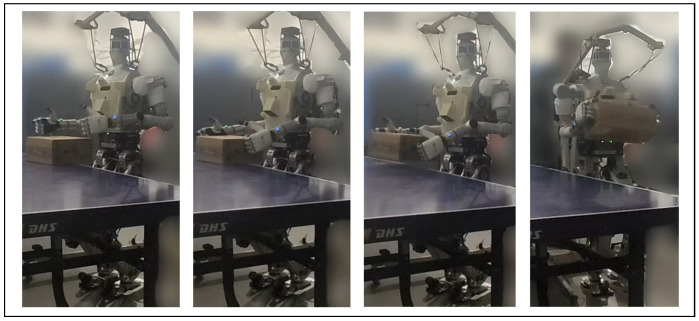 Figure 10
Figure 10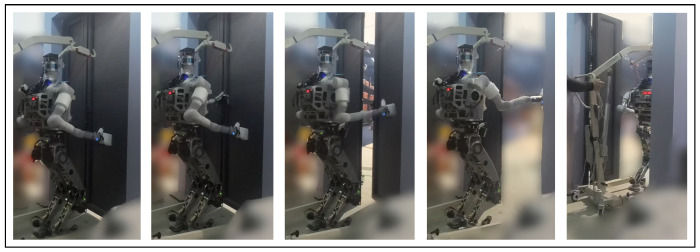 Figure 11
Figure 11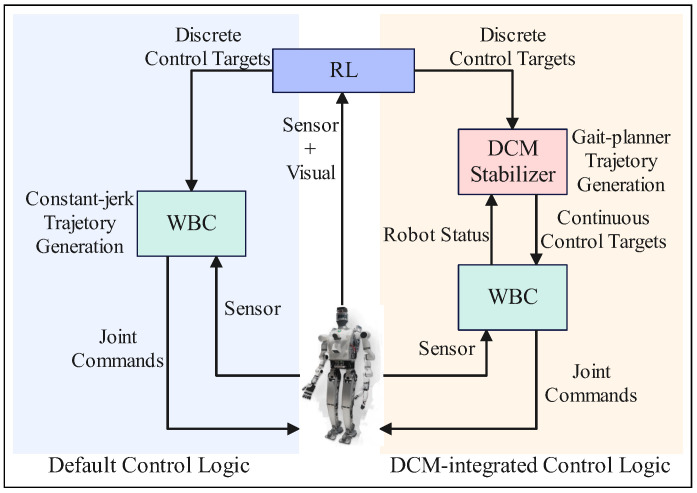 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Prosthetics and Rehabilitation Robotics · Reinforcement Learning in Robotics