An Optimised Spider-Inspired Soft Actuator for Extraterrestrial Exploration
Jonah Mack, Maks Gepner, Francesco Giorgio-Serchi, Adam A. Stokes

TL;DR
This paper introduces a spider-inspired soft robot optimized for extraterrestrial exploration, capable of efficient jumping and stowage.
Contribution
A novel soft actuator inspired by spider physiology with a non-backdriveable clutch for energy-efficient position holding in space.
Findings
The robot achieves a power-to-weight ratio of 249 W/kg and can jump 1.86 times its body length.
The collapsible design allows efficient stowage and self-deployment for space missions.
Optimization across materials and pressures improved actuation efficiency and controllability.
Abstract
Extraterrestrial exploration presents unique challenges for robotic systems, as traditional rigid rovers face limitations in stowage volume, traction on unpredictable terrain, and susceptibility to damage. Soft robotics offers promising solutions through bio-inspired designs that can mimic natural locomotion mechanisms. Here, we present an optimised, spider-inspired soft jumping robot for extraterrestrial exploration that addresses key challenges in soft robotics: actuation efficiency, controllability, and deployment. Drawing inspiration from spider physiology—particularly their hydraulic extension mechanism—we develop a lightweight limb capable of multi-modal behaviour with significantly reduced energy requirements. Our 3D-printed soft actuator leverages pressure-driven collapse for efficient retraction and pressure-enhanced rapid extension, achieving a power-to-weight ratio of 249…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
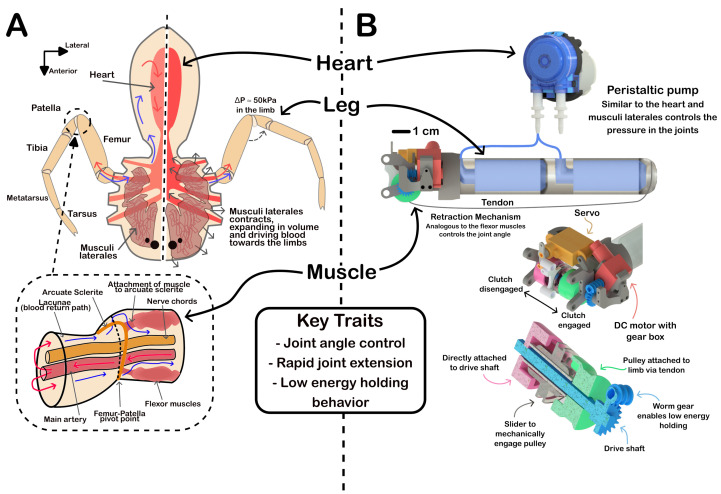 Figure 1
Figure 1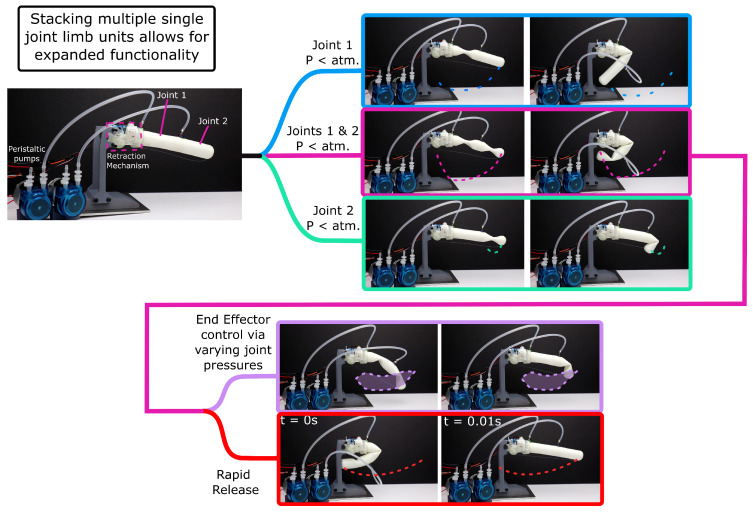 Figure 2
Figure 2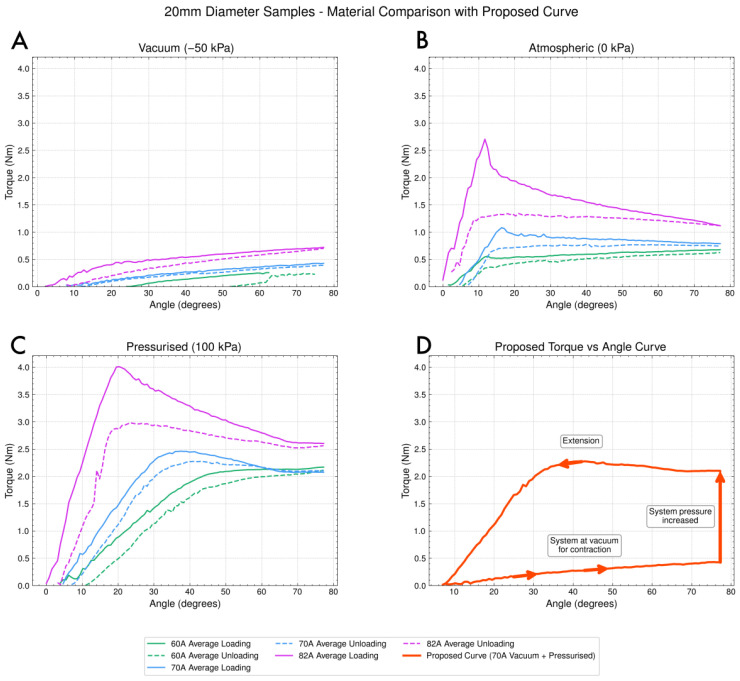 Figure 3
Figure 3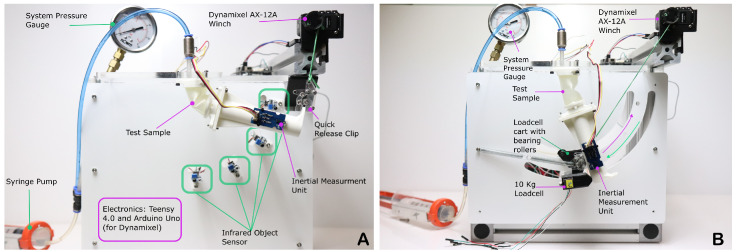 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7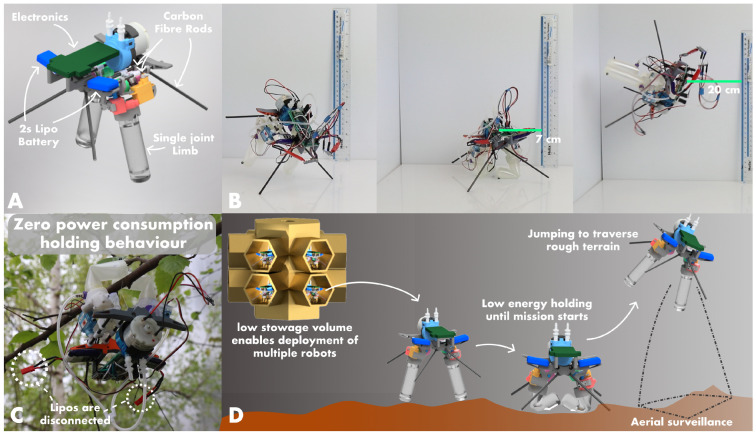 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Modular Robots and Swarm Intelligence · Robotic Locomotion and Control