An Enhanced Dynamic Model of a Spatial Parallel Mechanism Receiving Direct Constraints from the Base at Two Point-Contact Higher Kinematic Pairs
Chen Cheng, Xiaojing Yuan, Yenan Li

TL;DR
This paper introduces a biologically inspired parallel mechanism for 3D chewing simulation, with a focus on dynamic modeling and friction effects.
Contribution
The paper proposes an inverse dynamic model using Euler parameters for a parallel mechanism with direct constraints and friction effects.
Findings
The model using Euler parameters consumes only 23% of the time compared to the model using Euler angles.
Friction effects significantly increase the model's nonlinearity.
Direct constraints from the base raise modeling complexity and computational cost.
Abstract
In this paper, a biologically congruent parallel mechanism (PM) inspired by the masticatory system of human beings has been proposed to recreate complete chewing behaviours in three-dimensional space. The mechanism is featured by direct constraints from the base (DCFB) to its end effector at two higher kinematic pairs (HKPs), which greatly raise its topological complexity. Meanwhile, friction effects occur at HKPs and actuators, causing wear and then reducing motion accuracy. Regarding these, an inverse dynamic model that can raise the computational efficiency and the modelling fidelity is proposed, being prepared to be applied to realise accurate real-time motion and/or force control. In it, Euler parameters are employed to express the motions of the constrained end effector, and Newton–Euler’s law is applied, which can conveniently incorporate friction effects at both HKPs and…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
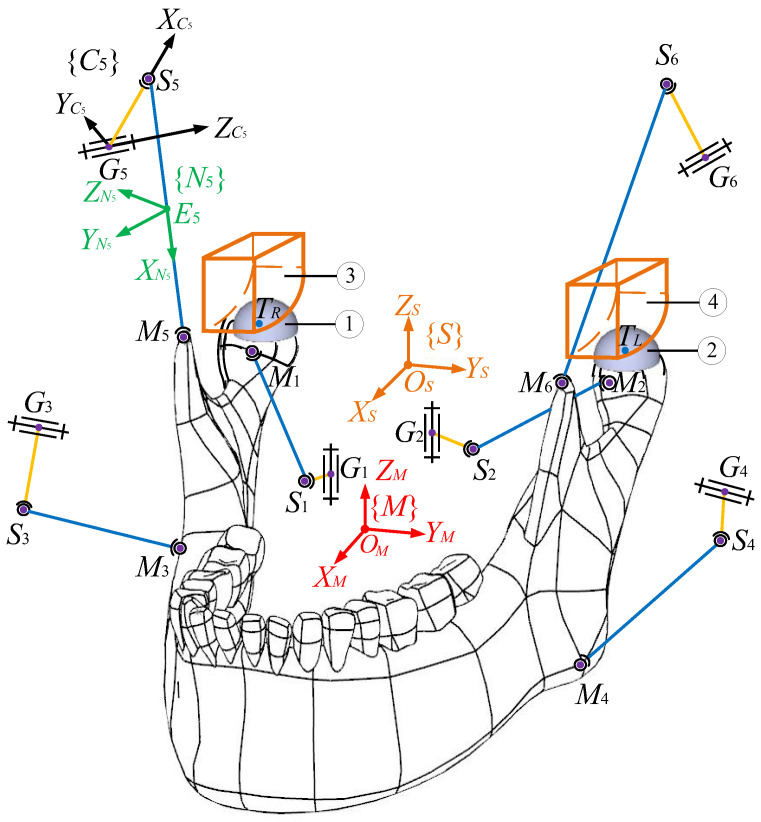 Figure 1
Figure 1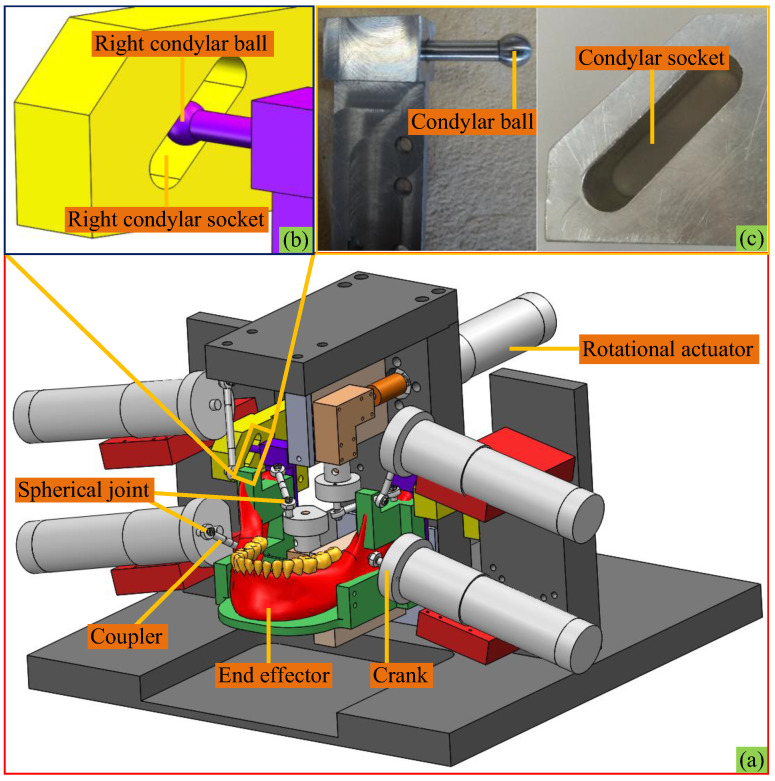 Figure 2
Figure 2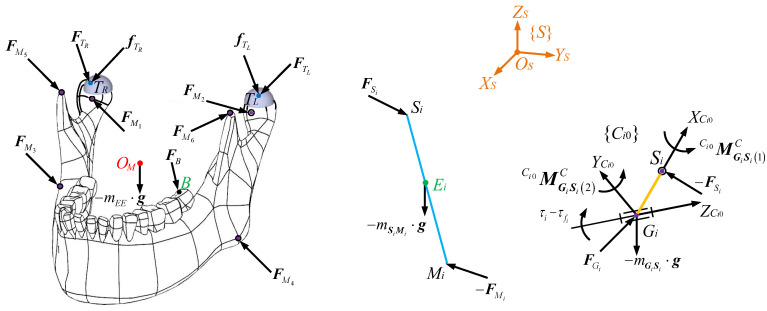 Figure 3
Figure 3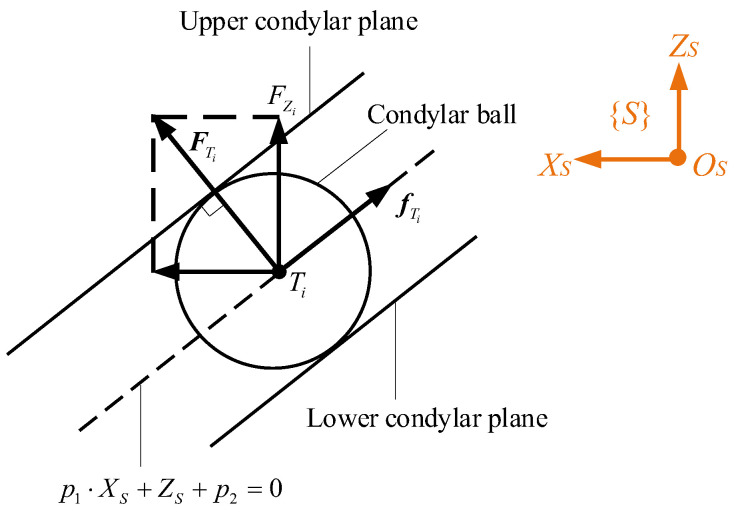 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13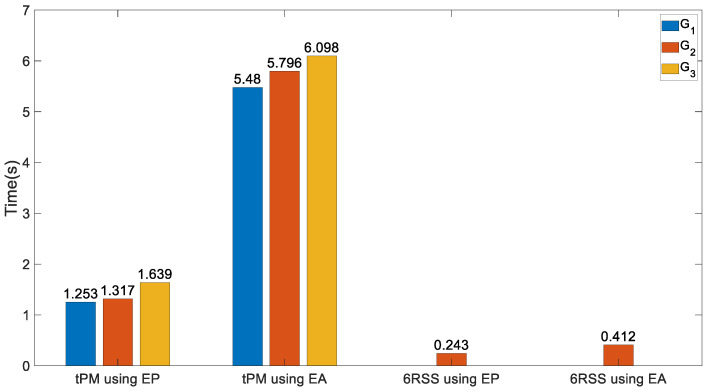 Figure 14
Figure 14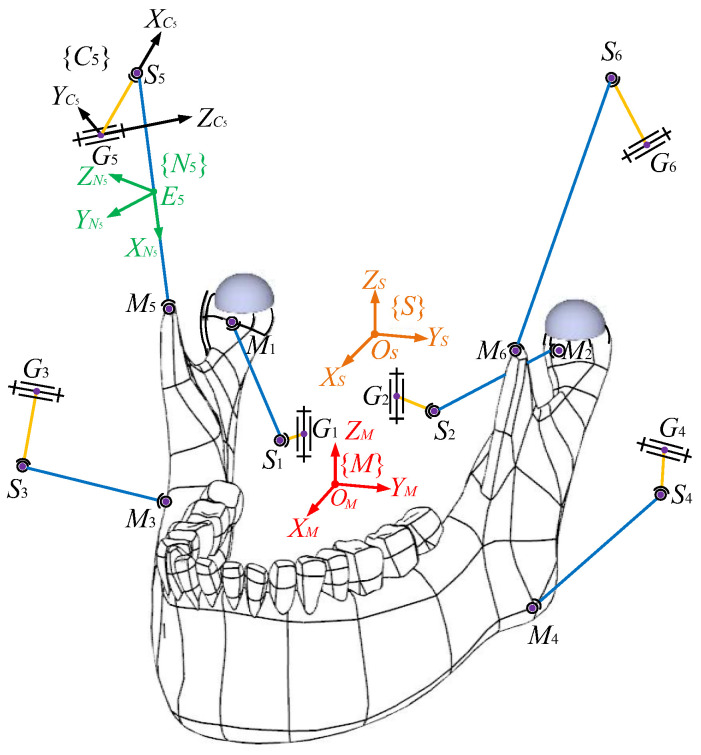 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Mechanisms and Dynamics · Mechanics and Biomechanics Studies · Robot Manipulation and Learning