Design of a Modular Wall-Climbing Robot with Multi-Plane Transition and Cleaning Capabilities
Boyu Wang, Weijian Zhang, Jianghan Luo, Qingsong Xu

TL;DR
This paper introduces a modular wall-climbing robot that can autonomously switch walls and perform tasks like cleaning.
Contribution
The novelty lies in the modular design with quick attachment-and-disassembly and efficient wall detection for multi-plane transitions.
Findings
The MC-1 robot successfully performs multi-angle wall transitions.
It demonstrates good crawling ability and loading capacity.
The magnetic attachment method and ultrasonic sensor enhance autonomous operation.
Abstract
This paper presents the design and development of a new modular wall-climbing robot—Modular Wall Climbing-1 (MC-1)—for solving the problem of autonomous wall switching observed in wall-climbing robots. Each modular robot is capable of independently adhering to vertical surfaces and maneuvering, making it a fully autonomous robotic system. Multiple modules of MC-1 are connected by an electromagnet-based magnetic attachment method, and wall transitions are achieved using a servo motor mechanism. Moreover, an ultrasonic sensor is employed to measure the unknown wall-inclination angle. Mechanical analysis is conducted for MC-1 at rest individually and in combination to determine the required suction force. Experimental investigations are performed to assess the robot’s crawling ability, loading capacity, and wall-transition performance. The results demonstrate that the MC-1 robot is capable…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
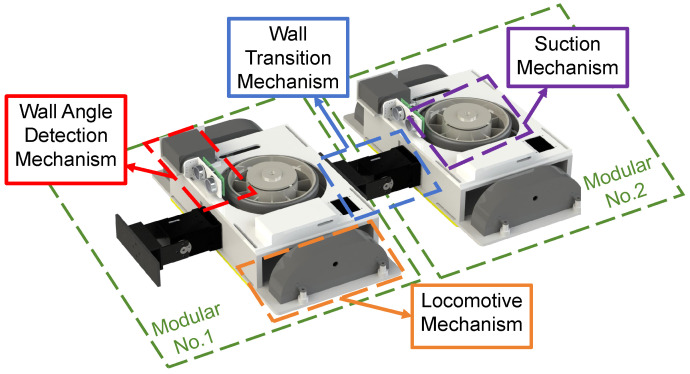 Figure 1
Figure 1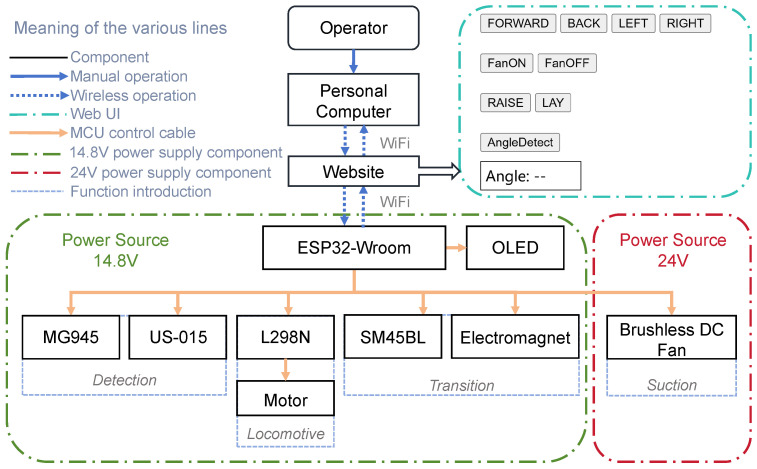 Figure 2
Figure 2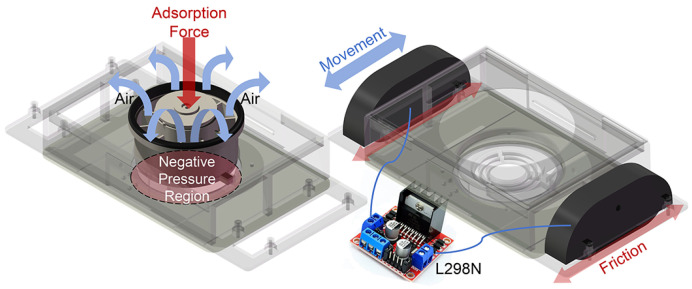 Figure 3
Figure 3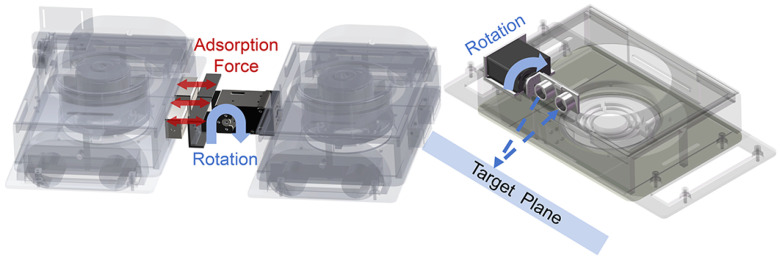 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8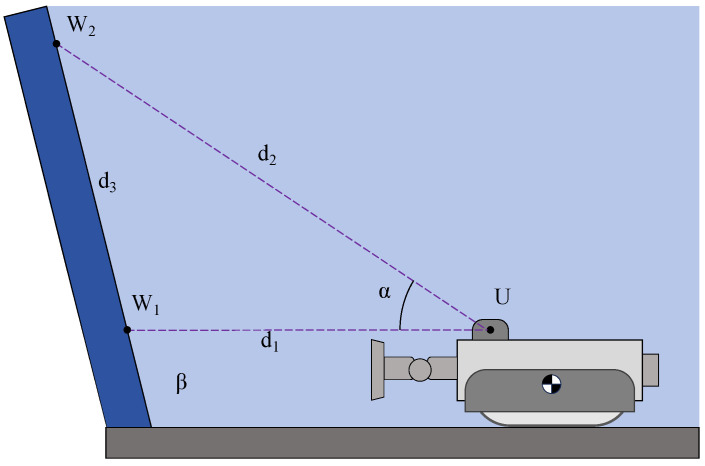 Figure 9
Figure 9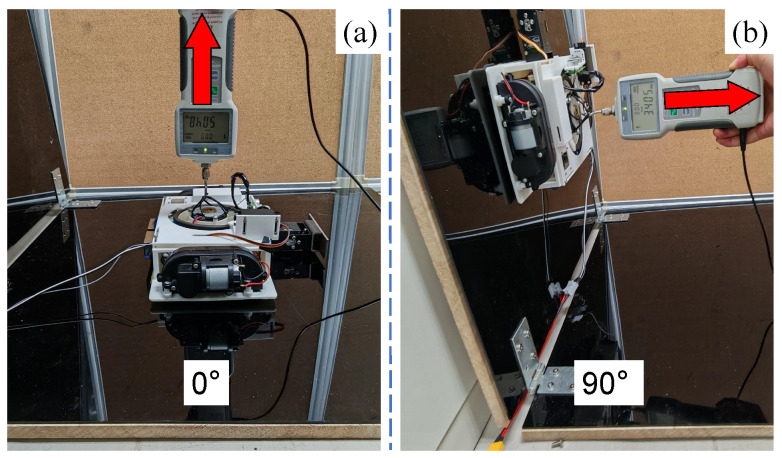 Figure 10
Figure 10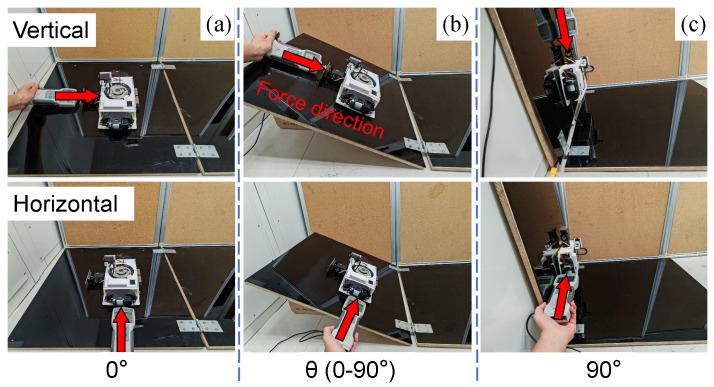 Figure 11
Figure 11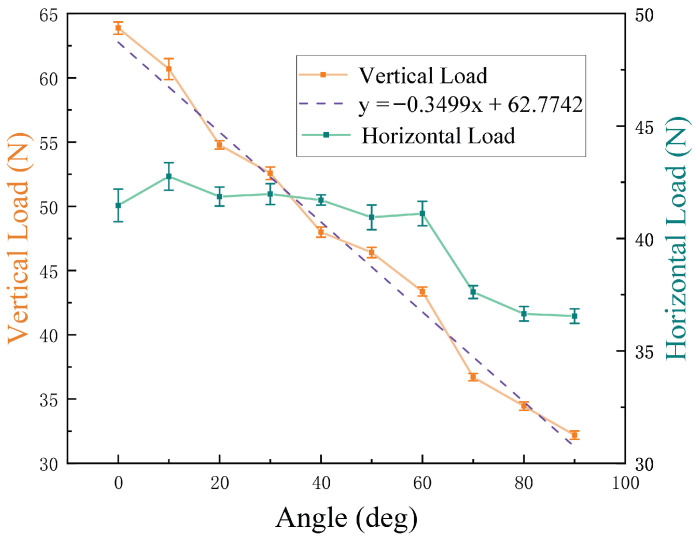 Figure 12
Figure 12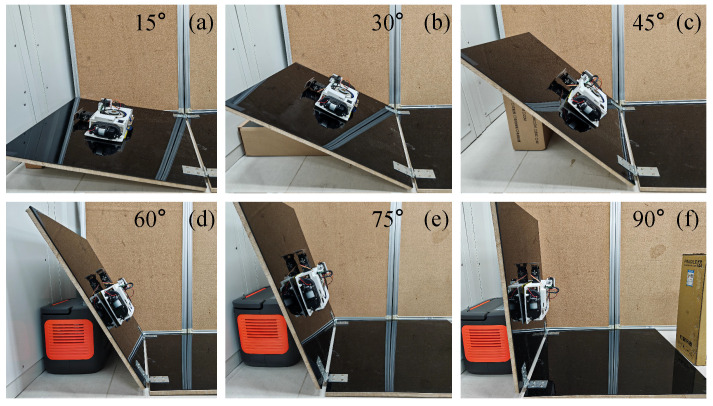 Figure 13
Figure 13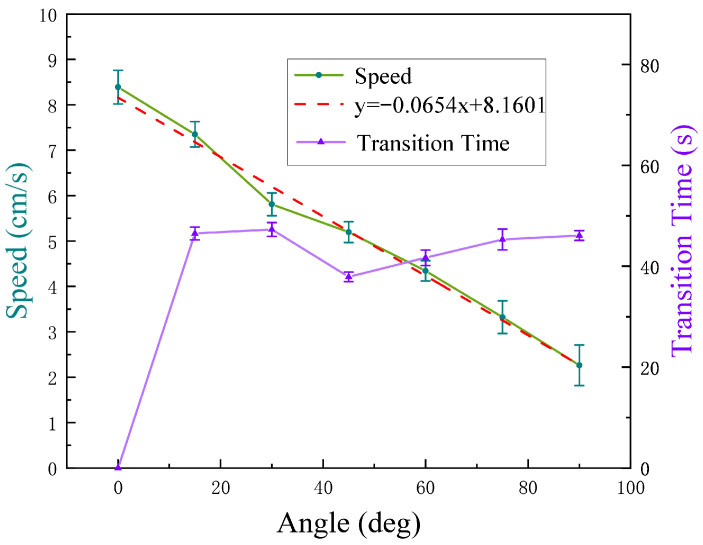 Figure 14
Figure 14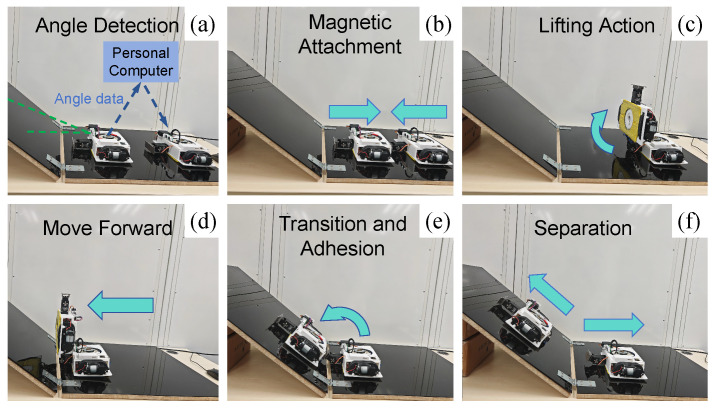 Figure 15
Figure 15Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Modular Robots and Swarm Intelligence · Micro and Nano Robotics