Mechanical Design, Control, and Laboratory Test of a Two-Degrees-of-Freedom Elbow Prosthesis
Ramsés Hernández-Cerero, Juan Alejandro Flores-Campos, José Juan Mojica-Martínez, Adolfo Angel Casarez-Duran, Luis Angel Guerrero-Hernández, Christopher René Torres-SanMiguel

TL;DR
This paper describes a two-degrees-of-freedom elbow prosthesis prototype and compares two control methods to improve its movement accuracy.
Contribution
The novel contribution is the use of a sliding mode control with time base generator strategy to achieve biomimetic movement in a 2DOF elbow prosthesis.
Findings
The SMC + TBG control method produced biomimetic angular displacement and velocity patterns.
The PID control method failed to replicate natural movement patterns effectively.
The prosthesis demonstrated a range of motion suitable for transhumeral amputees.
Abstract
This study presents the design and experimental testing of a two-degrees-of-freedom (2DOF) elbow prosthesis prototype designed to replicate the movement patterns of a native or normal human elbow. Two methods of the control of the prosthesis, namely, the proportional–integral–derivative method (PID; a well-established method) and a combination of sliding mode control with a time base generator strategy (SMC + TBG; an advanced method), were compared on the basis of various performance metrics of the prosthesis, as obtained in laboratory tests. Among these metrics were the angular displacement and velocity as a function of time. The mechanical design combined 3D-printed components with custom-designed joints, featuring a worm gear transmission with a crown gear for flexion–extension, enhanced by torsional springs, and a pinion gear with a crown gear for pronation–supination and control.…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1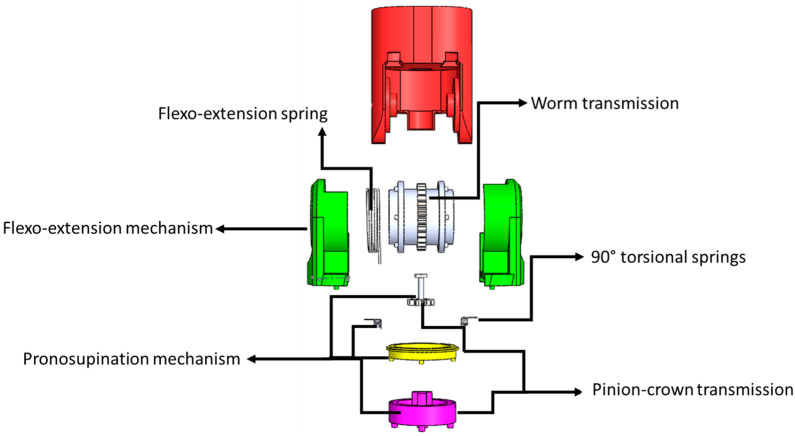 Figure 2
Figure 2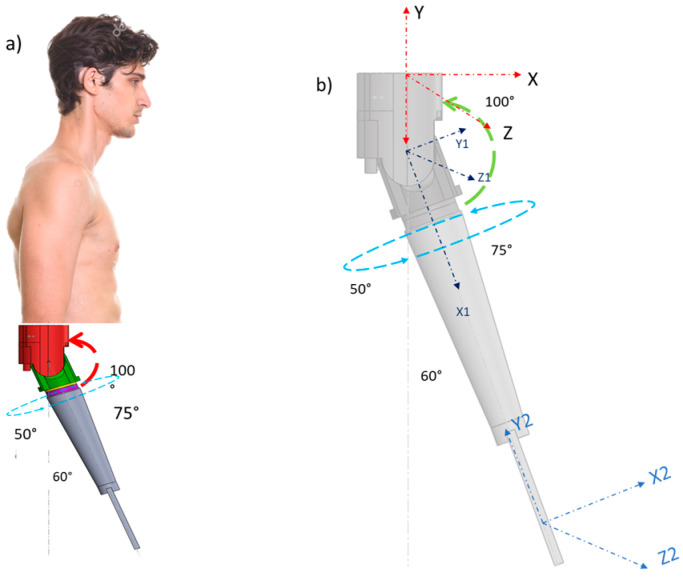 Figure 3
Figure 3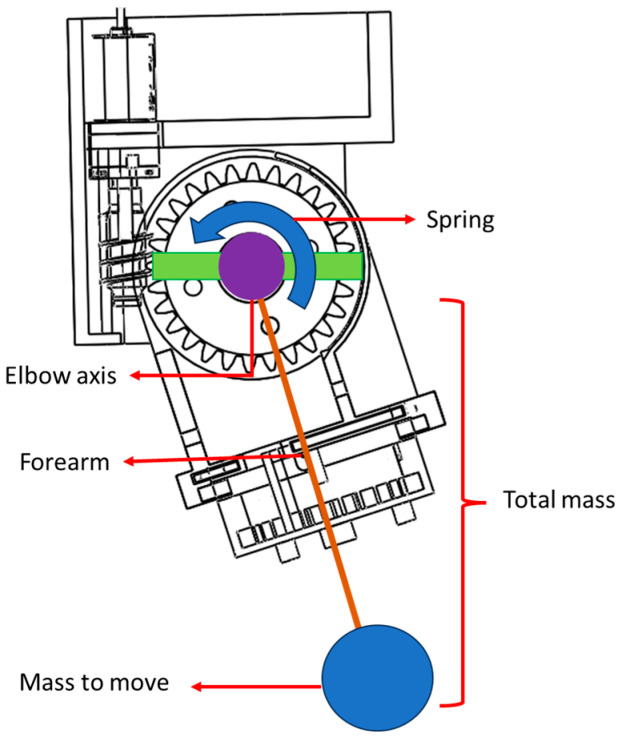 Figure 4
Figure 4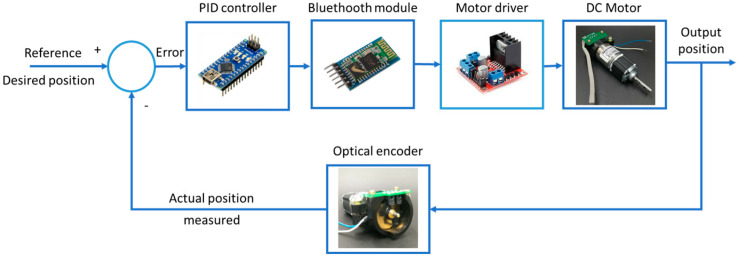 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8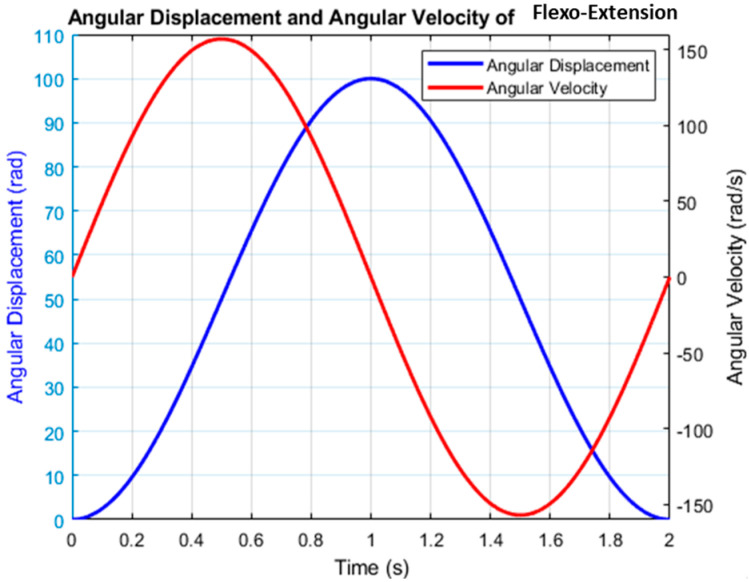 Figure 9
Figure 9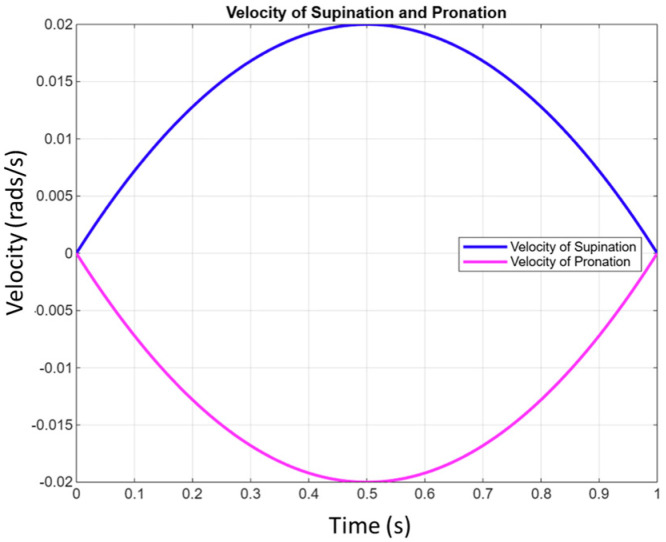 Figure 10
Figure 10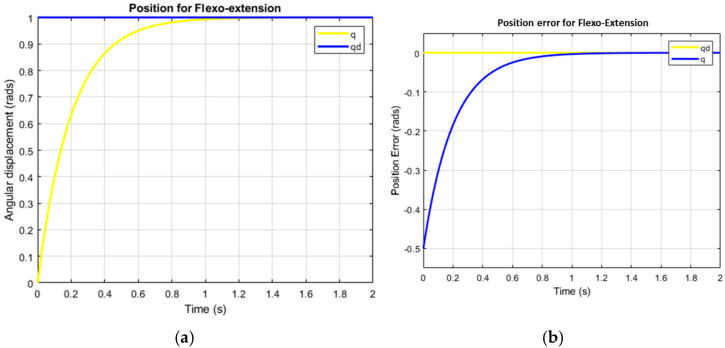 Figure 11
Figure 11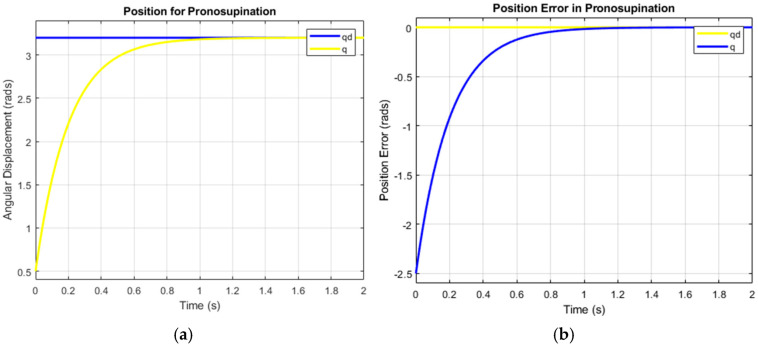 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14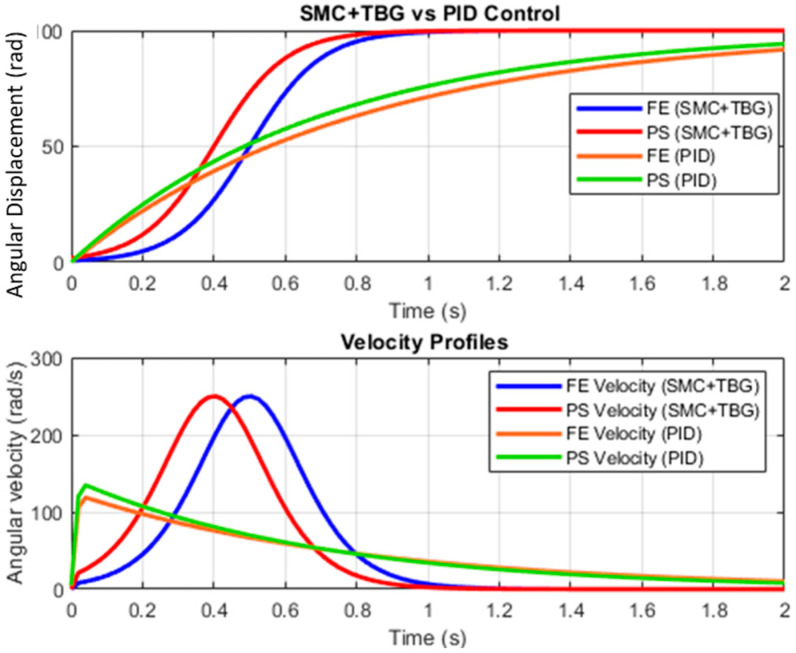 Figure 15
Figure 15Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsProsthetics and Rehabilitation Robotics · Muscle activation and electromyography studies · Soft Robotics and Applications