Hybrid disturbance observer and fuzzy logic controller for a new aerial manipulation system
Alaa Khalifa, Shaaban M. Shaaban, Ahmed Khalifa

TL;DR
This paper introduces a new aerial robot with a 2-DOF manipulator and a hybrid control system that improves performance and stability under disturbances.
Contribution
A novel hybrid control approach combining a disturbance observer and fuzzy logic for aerial manipulation systems is proposed.
Findings
The system achieves accurate 6-DOF tracking with low computational load.
The proposed controller outperforms the DOb-PD controller in response.
Stability is maintained during payload exchanges within actuator constraints.
Abstract
Aerial manipulation systems are highly attractive for various applications due to their distinctive features. However, the systems discussed in the literature are constrained by either a restricted number of end-effector degrees of freedom (DOFs) or low payload capability. In our previous research, we mounted a manipulator with a gripper on the underside of a quadrotor to enhance environmental interaction. This paper explores a quadrotor equipped with a 2-DOF manipulator featuring a distinctive topology that allows the end-effector to follow a specified 6-DOF trajectory with the least number of actuators required. An overview of the proposed manipulation system, along with its kinematic and dynamic analysis, is presented. Nevertheless, controlling this system presents significant challenges because of its considerable couplings, nonlinearities, and external disturbances. This paper…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
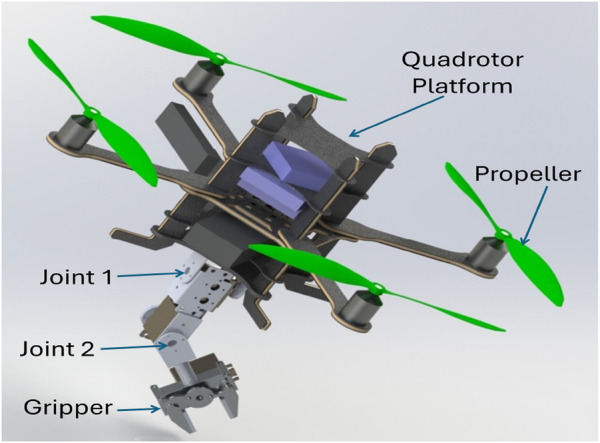 Figure 1
Figure 1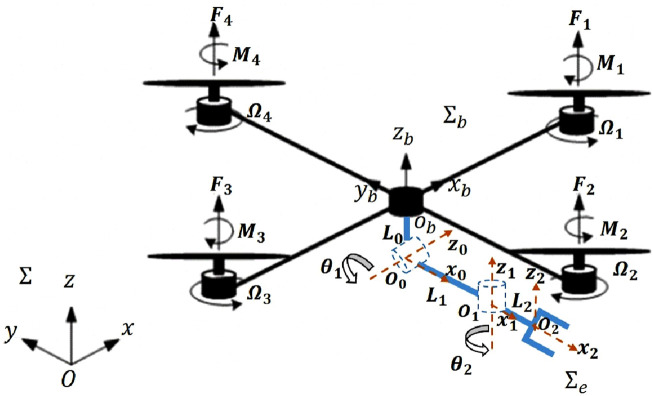 Figure 2
Figure 2 Figure 3
Figure 3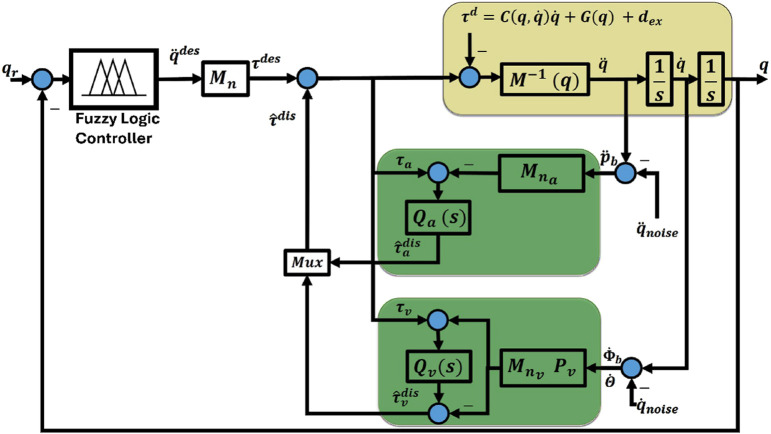 Figure 4
Figure 4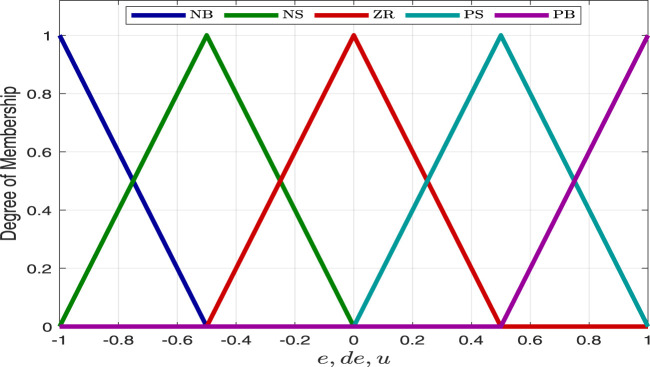 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9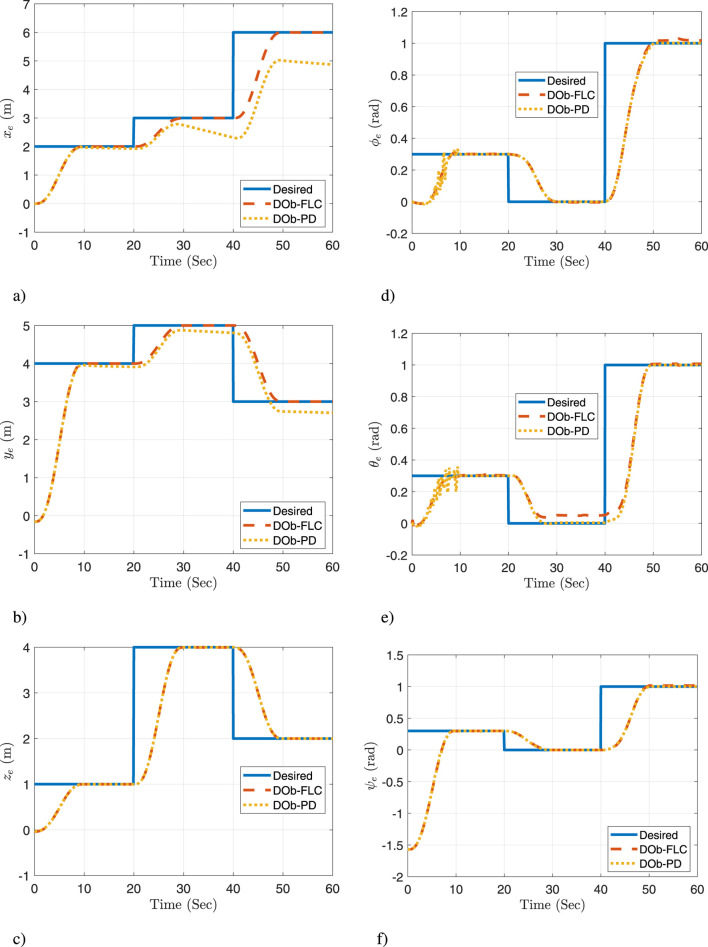 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Robot Manipulation and Learning · Teleoperation and Haptic Systems