2HR-Net VSLAM: Robust visual SLAM based on dual high-reliability feature matching in dynamic environments
Wang Yang, Huang Chao, Zhang Yi, Tan Shuyi

TL;DR
This paper introduces a new VSLAM system that improves robot navigation in dynamic environments by using advanced feature matching techniques.
Contribution
The paper proposes 2HR-Net, a novel VSLAM system with dual high-reliability feature matching for improved robustness in dynamic settings.
Findings
The proposed 2HR-Net achieved a feature repeatability rate of approximately 70% in dynamic scenarios.
The RMSE and standard deviation of ATE were reduced by about 90% compared to ORB-SLAM3.
The system outperforms mainstream methods in feature repeatability, matching accuracy, and localization precision.
Abstract
Visual Simultaneous Localization and Mapping (VSLAM) is the key technology for autonomous navigation of mobile robots. However, feature-based VSLAM systems still face two major challenges in dynamic complex environments: insufficient feature reliability and significant dynamic interference, urgently requiring improved matching robustness. This paper innovatively proposes a dynamic adaptive VSLAM system based on the High-repeatability and High-reliability feature matching network (2HR-Net), which improves localization accuracy in dynamic environments through three key innovations: First, the 2HR feature detection network is designed, integrating the K-Means clustering algorithm into L2-Net to achieve feature point detection with both high repeatability and high reliability. Second, the lightweight YOLOv8n model is integrated to detect and remove feature points in dynamic regions in…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35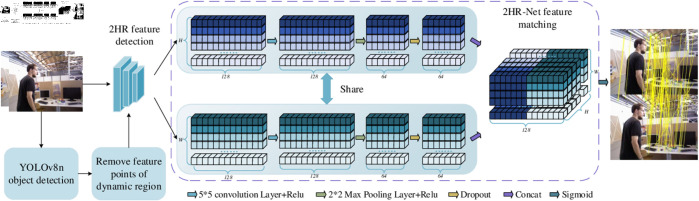 Figure 36
Figure 36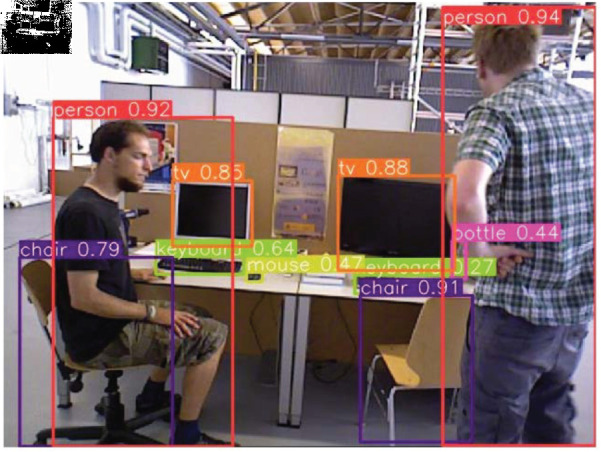 Figure 37
Figure 37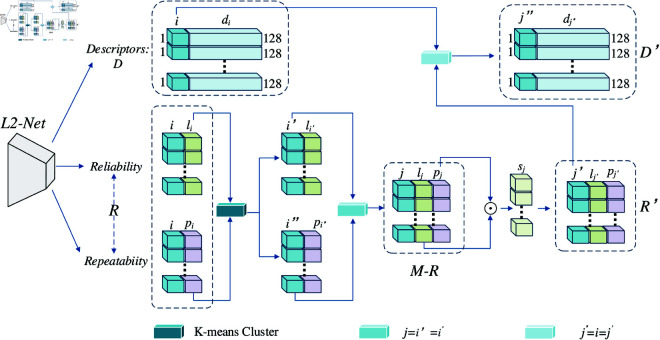 Figure 38
Figure 38 Figure 39
Figure 39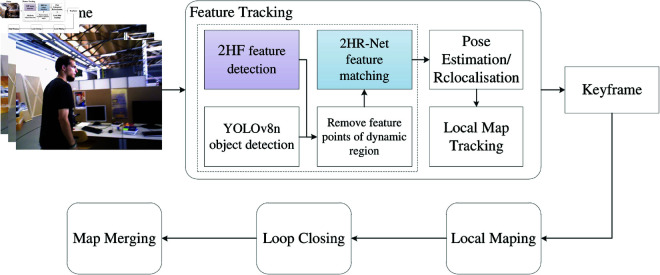 Figure 40
Figure 40 Figure 41
Figure 41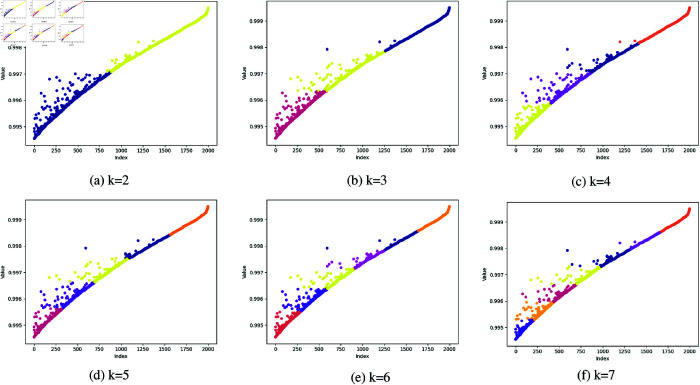 Figure 42
Figure 42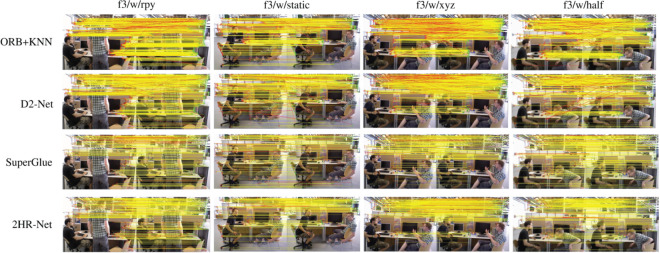 Figure 43
Figure 43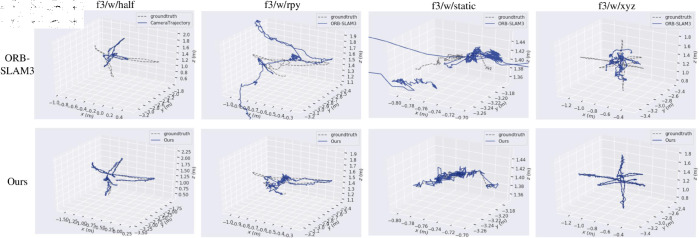 Figure 44
Figure 44 Figure 45
Figure 45 Figure 46
Figure 46 Figure 47
Figure 47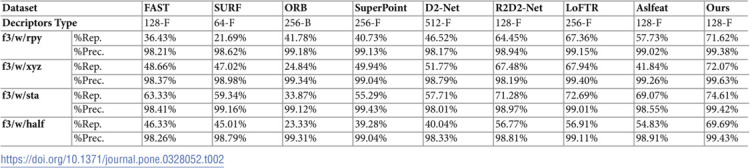 Figure 48
Figure 48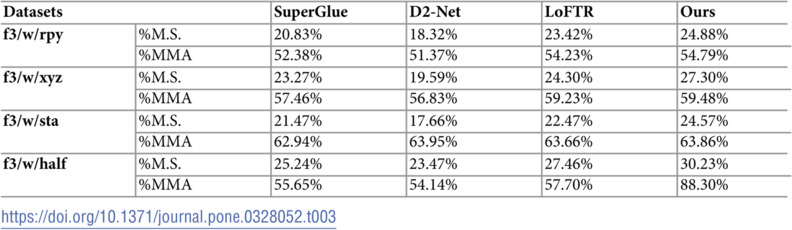 Figure 49
Figure 49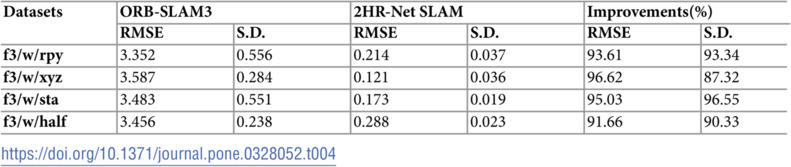 Figure 50
Figure 50Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Advanced Image and Video Retrieval Techniques · Robotic Path Planning Algorithms