Kinetostatic Modeling and Performance Analysis of Redundant-Actuated 4-PSS&S Compliant Parallel 3-DOF Micro-Rotation Mechanism
Jun Ren, Ruihan Xiao, Yahao Lu

TL;DR
This paper introduces a new micro-rotation mechanism with three rotational degrees of freedom and shows how redundant actuation improves performance in terms of force, stiffness, accuracy, and workspace.
Contribution
A novel redundant-actuated 4-PSS&S compliant parallel mechanism with improved kinetostatic performance is proposed and analyzed.
Findings
Redundant actuation reduces peak actuating force by up to 50% and increases output stiffness by 26.68–33.31%.
Optimal force distribution reduces parasitic axis drift, improving motion accuracy at the constrained flexure spherical hinge.
The workspace volume increases by 94.32% compared to the 3-PSS&S mechanism and 372.89% compared to the non-redundant 4-PSS&S mechanism.
Abstract
This paper presents a novel redundant-actuated 4-PSS&S compliant parallel micro-rotation mechanism (P represents the actuated prismatic joint and S denotes the spherical pair) with three rotational degrees of freedom. First, compliance models of the flexure spherical hinge, each branch and the whole mechanism are established using the compliance matrix method. Then, the mechanism is simplified as an equivalent spring system to establish two kinetostatic models, with their correctness validated through finite element simulations. Finally, a comparative analysis is conducted on the performance of the 3-PSS&S mechanism, non-redundant-actuated 4-PSS&S mechanism and redundant-actuated 4-PSS&S mechanism. The results show the following: ① For the 4-PSS&S mechanism, redundant actuation with optimized actuating force distribution effectively reduces the peak actuating force by up to 50% (average…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
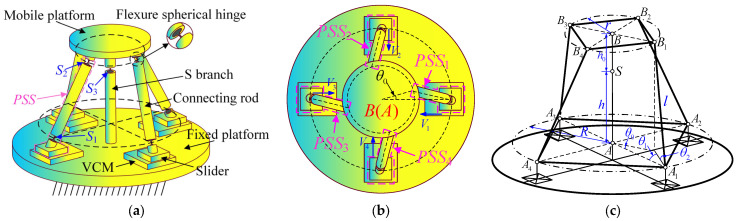 Figure 1
Figure 1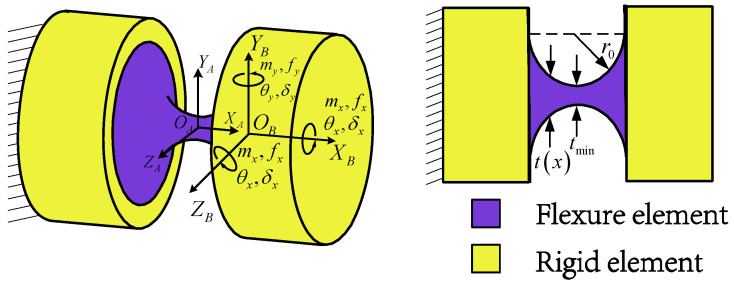 Figure 2
Figure 2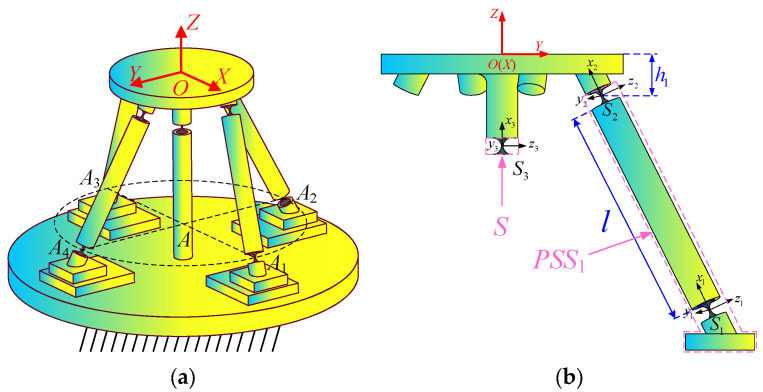 Figure 3
Figure 3 Figure 4
Figure 4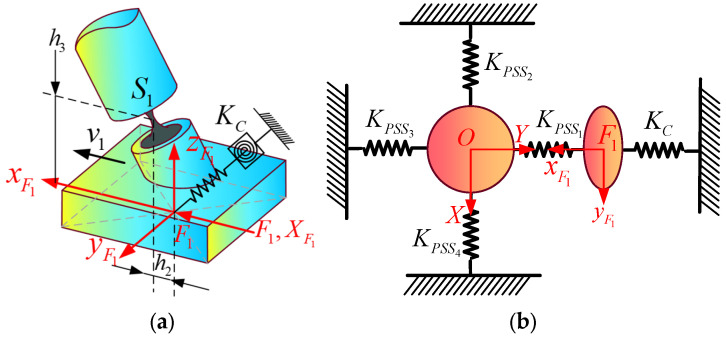 Figure 5
Figure 5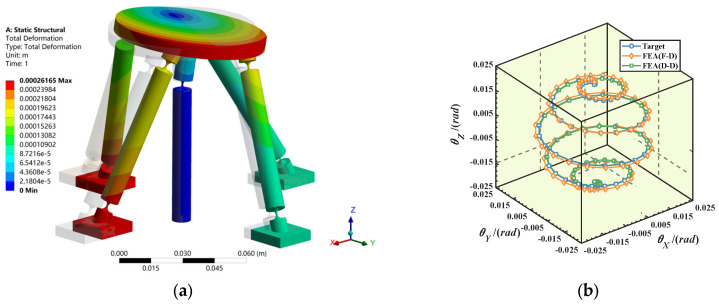 Figure 6
Figure 6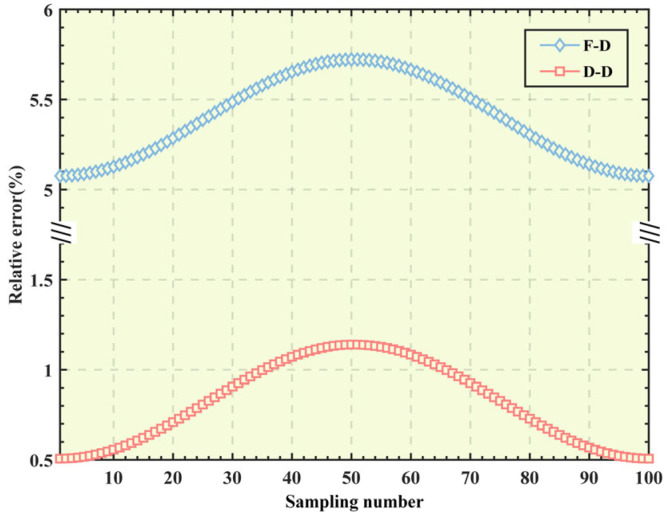 Figure 7
Figure 7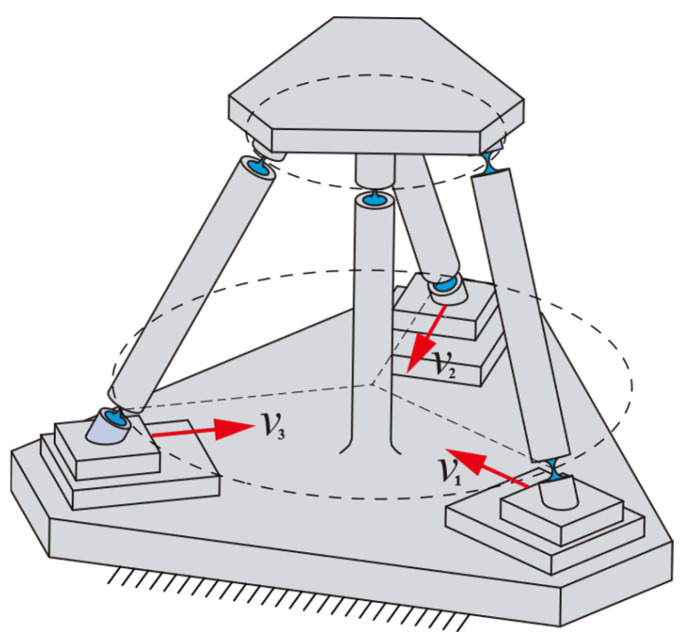 Figure 8
Figure 8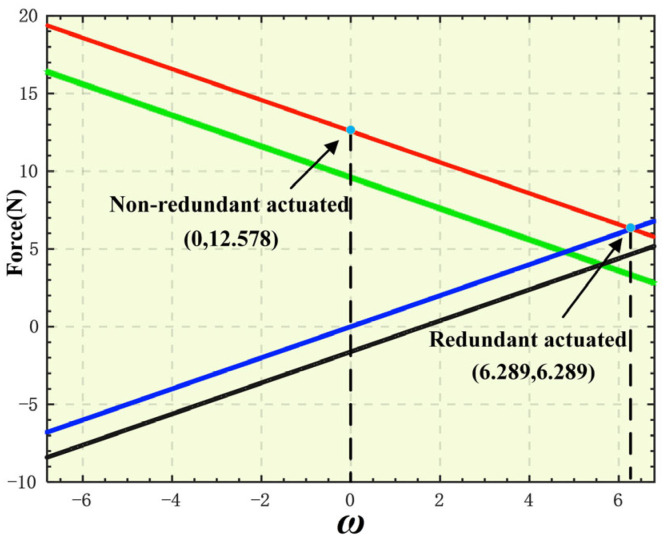 Figure 9
Figure 9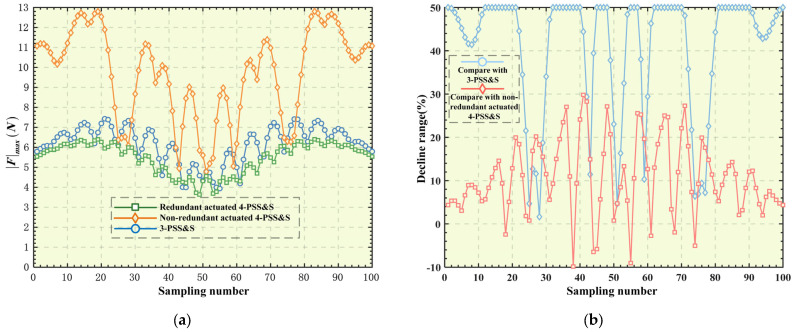 Figure 10
Figure 10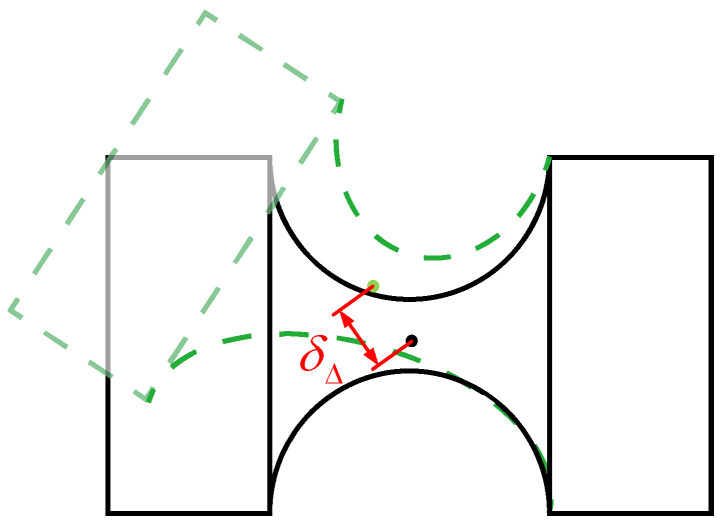 Figure 11
Figure 11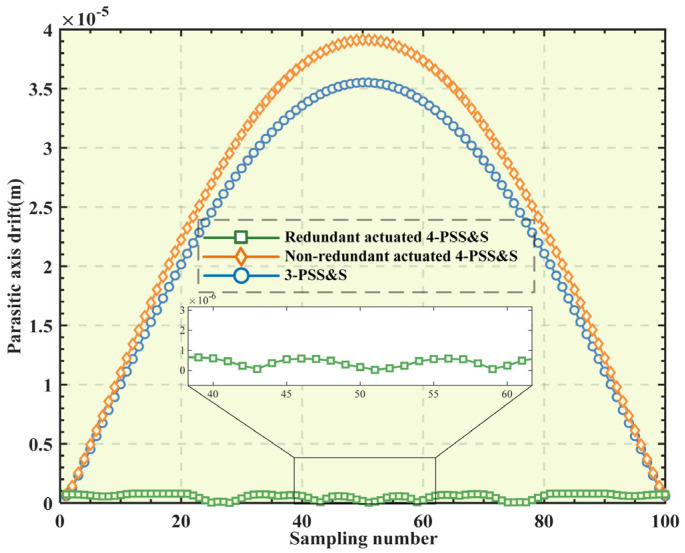 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsPiezoelectric Actuators and Control · Iterative Learning Control Systems · Robotic Mechanisms and Dynamics