A Gait Sub-Phase Switching-Based Active Training Control Strategy and Its Application in a Novel Rehabilitation Robot
Junyu Wu, Ran Wang, Zhuoqi Man, Yubin Liu, Jie Zhao, Hegao Cai

TL;DR
This paper introduces a new rehabilitation robot that uses advanced gait recognition to provide personalized, adaptive training for patients recovering from balance disorders.
Contribution
A novel active training control strategy using gait sub-phase recognition to enable personalized rehabilitation robot assistance.
Findings
A hybrid deep neural network model achieved over 99% accuracy in gait sub-phase recognition.
The active training strategy improves patient engagement and autonomous movement during rehabilitation.
The system enables more precise and personalized rehabilitation programs compared to traditional robots.
Abstract
This research study proposes a heuristic hybrid deep neural network (DNN) gait sub-phase recognition model based on multi-source heterogeneous motion data fusion which quantifies gait phases and is applied in balance disorder rehabilitation control, achieving a recognition accuracy exceeding 99%. Building upon this model, a motion control strategy for a novel rehabilitation training robot is designed and developed. For patients with some degree of independent movement, an active training strategy is introduced; it combines gait recognition with a variable admittance control strategy. This strategy provides assistance during the stance phase and moderate support during the swing phase, effectively enhancing the patient’s autonomous movement capabilities and increasing engagement in the rehabilitation process. The gait phase recognition system not only provides rehabilitation…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
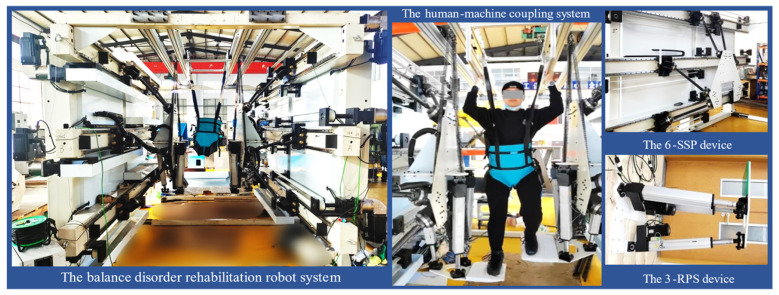 Figure 1
Figure 1 Figure 2
Figure 2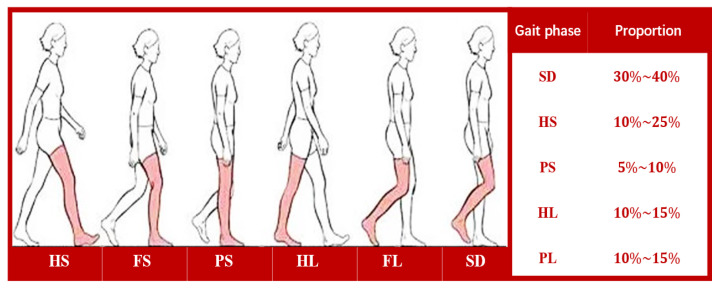 Figure 3
Figure 3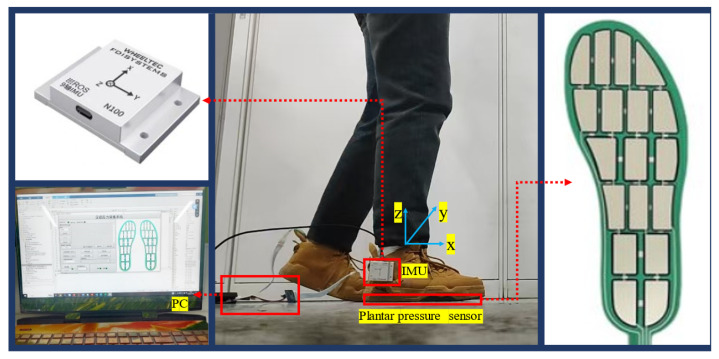 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8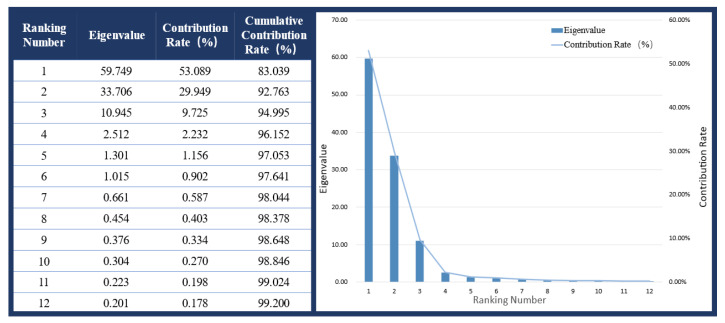 Figure 9
Figure 9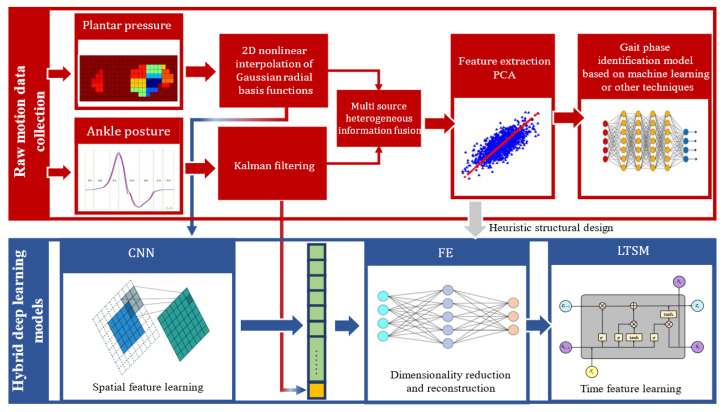 Figure 10
Figure 10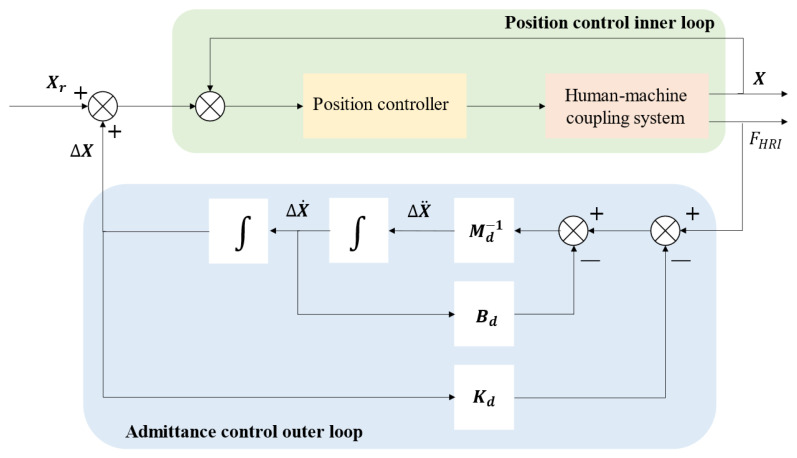 Figure 11
Figure 11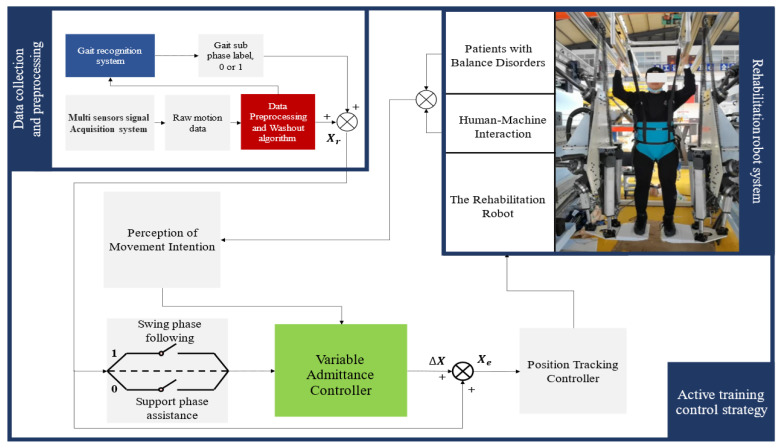 Figure 12
Figure 12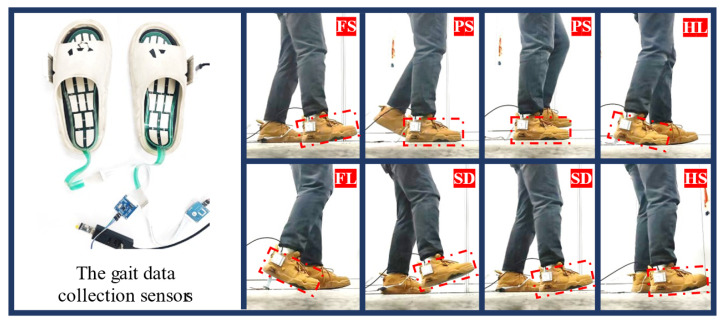 Figure 13
Figure 13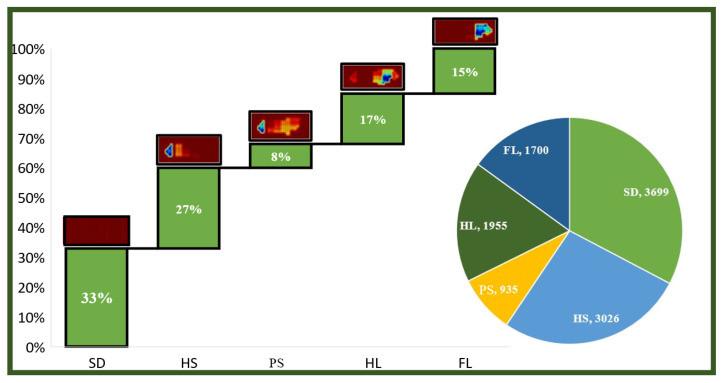 Figure 14
Figure 14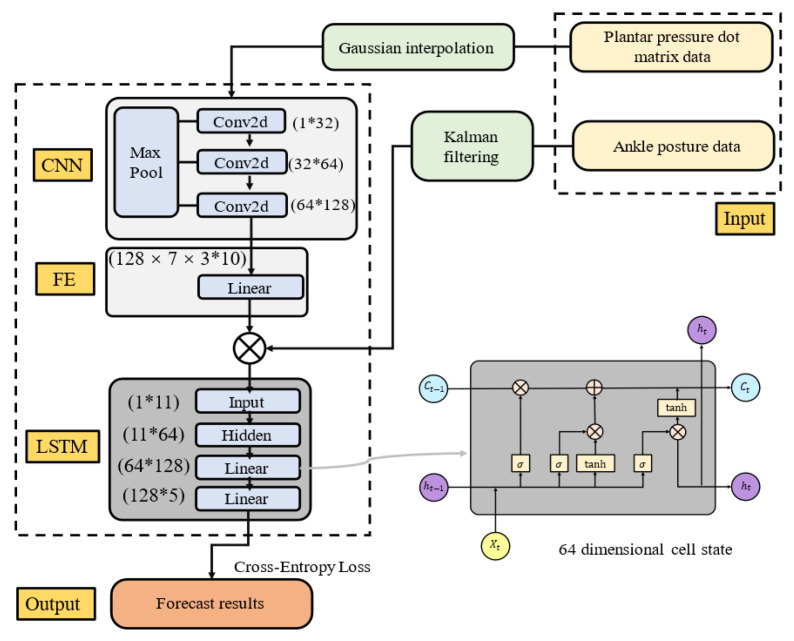 Figure 15
Figure 15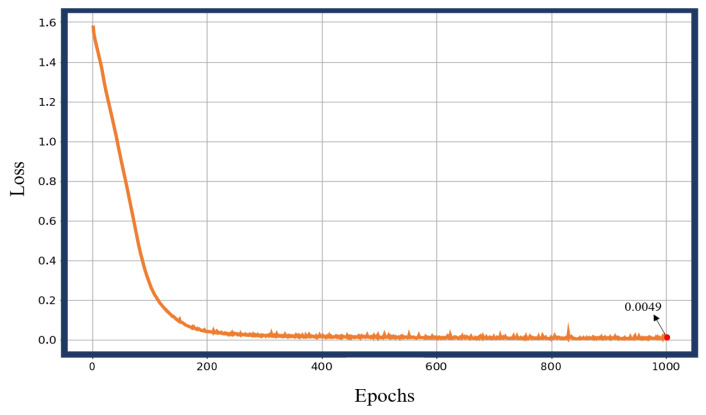 Figure 16
Figure 16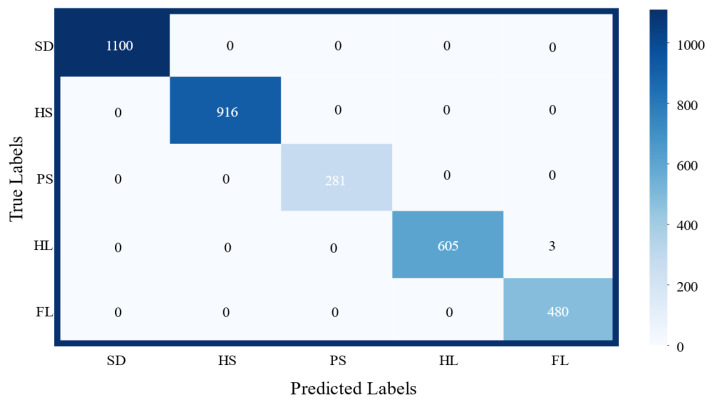 Figure 17
Figure 17 Figure 18
Figure 18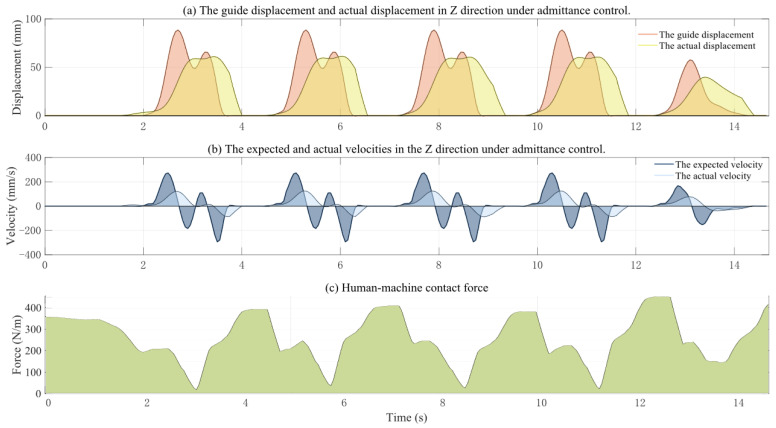 Figure 19
Figure 19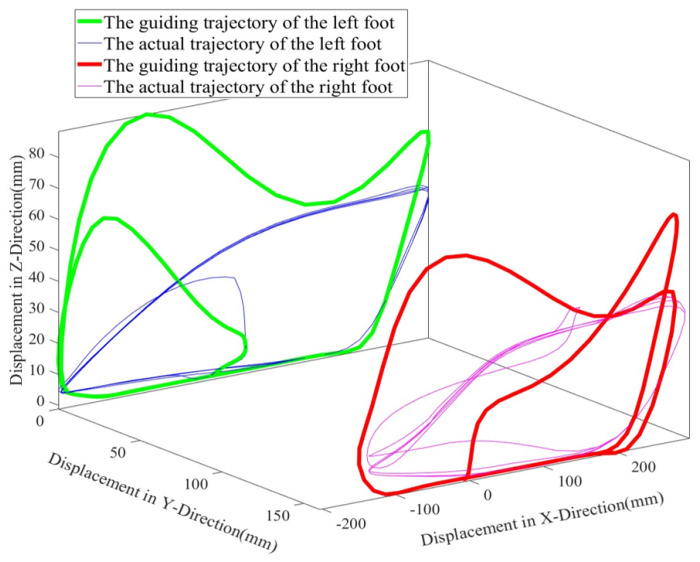 Figure 20
Figure 20Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStroke Rehabilitation and Recovery · Balance, Gait, and Falls Prevention · Prosthetics and Rehabilitation Robotics