Enhancing Legged Robot Locomotion Through Smooth Transitions Using Spiking Central Pattern Generators
Horacio Rostro-Gonzalez, Erick I. Guerra-Hernandez, Patricia Batres-Mendoza, Andres A. Garcia-Granada, Miroslava Cano-Lara, Andres Espinal

TL;DR
This paper introduces a spiking neural network to help a six-legged robot smoothly switch between walking styles, improving balance and energy efficiency.
Contribution
A novel method using spiking neural networks and SPIKE-synchronization to enable smooth and energy-efficient gait transitions in legged robots.
Findings
The spiking CPG network successfully generates three distinct gaits (walk, jog, run) with coordinated movements.
SPIKE-synchronization identifies optimal transition points, making gait changes imperceptible and energy-efficient.
The system dynamically adapts to terrain rigidity, validated through real-time testing on a physical hexapod robot.
Abstract
In this work, we propose the integration of a mechanism to enable smooth transitions between different locomotion patterns in a hexapod robot. Specifically, we utilize a spiking neural network (SNN) functioning as a Central Pattern Generator (CPG) to generate three distinct locomotion patterns, or gaits: walk, jog, and run. This network produces coordinated spike trains, mimicking those generated in the brain, which are translated into synchronized robot movements via PWM signals. Subsequently, these spike trains are compared using a similarity metric known as SPIKE-synchronization to identify the optimal point for transitioning from one gait to another. This approach aims to achieve three main objectives: first, to maintain the robot’s balance during transitions; second, to ensure that gait transitions are almost imperceptible; and third, to improve energy efficiency by reducing abrupt…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
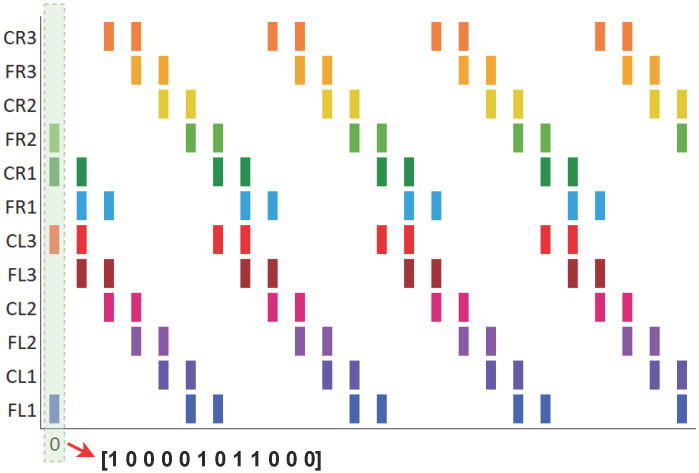 Figure 1
Figure 1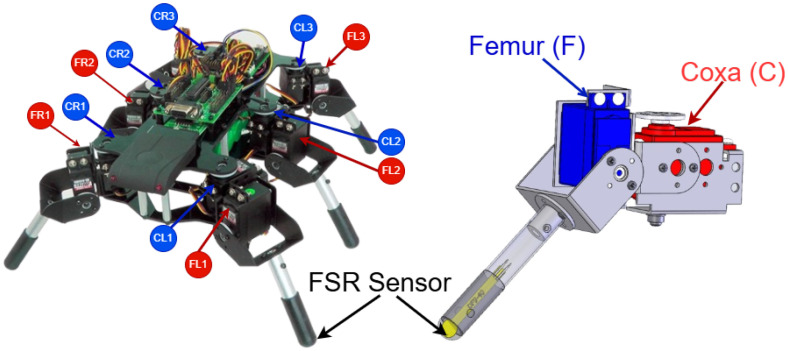 Figure 2
Figure 2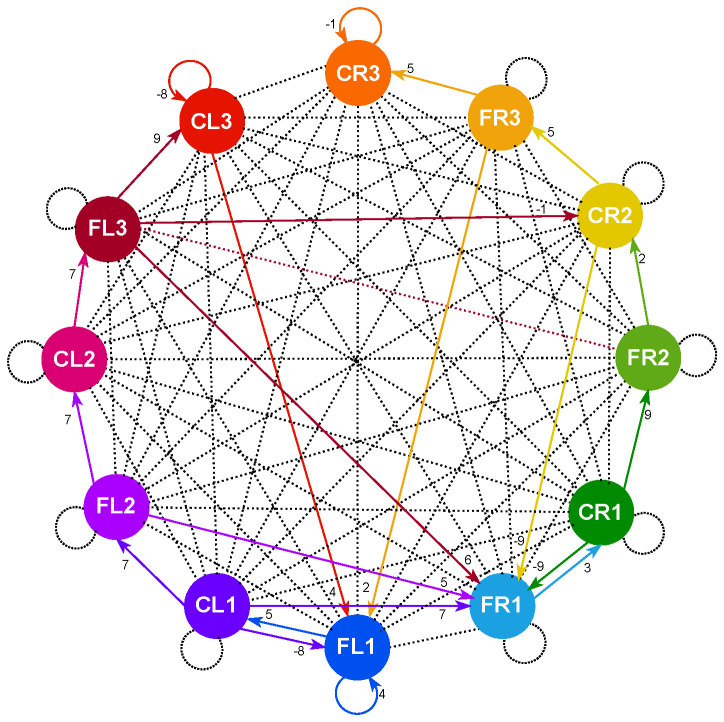 Figure 3
Figure 3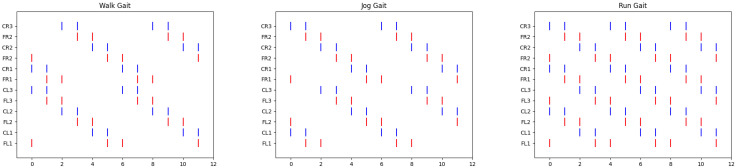 Figure 4
Figure 4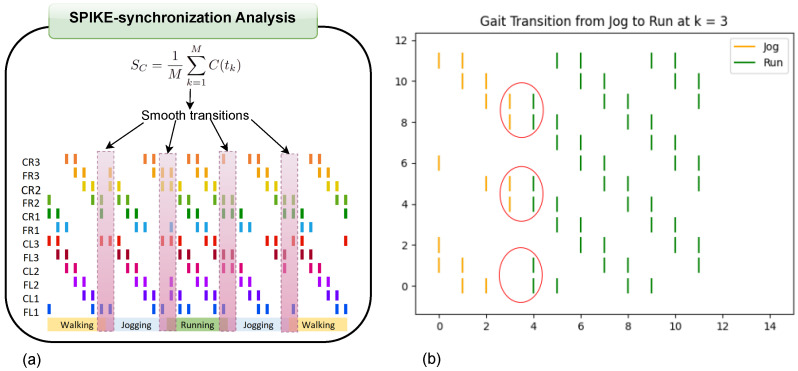 Figure 5
Figure 5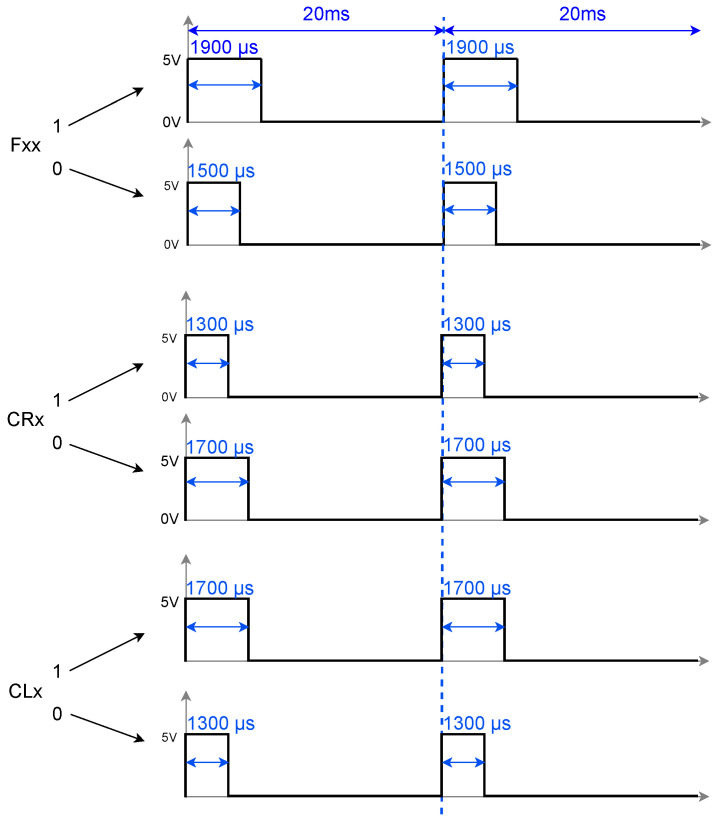 Figure 6
Figure 6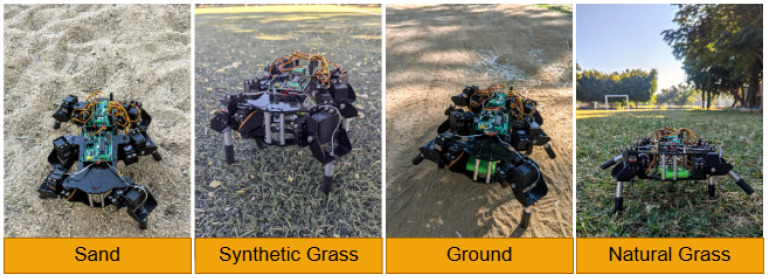 Figure 7
Figure 7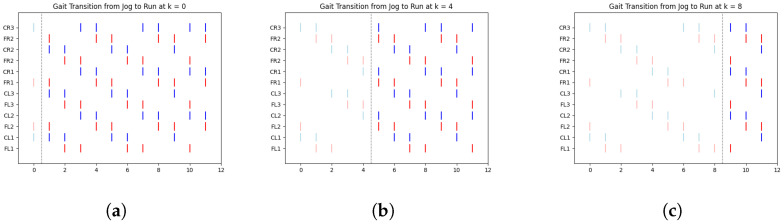 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Modular Robots and Swarm Intelligence · Robot Manipulation and Learning