Comprehensive Stiffness Modeling and Evaluation of an Orthopedic Surgical Robot for Enhanced Cutting Operation Performance
Heqiang Tian, Mengke Zhang, Jiezhong Tan, Zhuo Chen, Guangqing Chen

TL;DR
This paper introduces a high-accuracy stiffness modeling framework for orthopedic surgical robots to improve cutting precision and stability during operations.
Contribution
A validated stiffness modeling approach that reduces cutting deviation and improves workspace stability in orthopedic surgical robots.
Findings
Displacement errors were below 0.3 mm and joint stiffness estimation errors under 1.5%.
Cutting experiments on porcine femurs showed average stiffness prediction errors below 3%.
The model reduced cutting deviation by up to 10% and improved workspace stiffness stability by 30%.
Abstract
This study presents an integrated stiffness modeling and evaluation framework for an orthopedic surgical robot, aiming to enhance cutting accuracy and operational stability. A comprehensive stiffness model is developed, incorporating the stiffness of the end-effector, cutting tool, and force sensor. End-effector stiffness is computed using the virtual joint method based on the Jacobian matrix, enabling accurate analysis of stiffness distribution within the robot’s workspace. Joint stiffness is experimentally identified through laser tracker-based displacement measurements under controlled loads and calculated using a least-squares method. The results show displacement errors below 0.3 mm and joint stiffness estimation errors under 1.5%, with values more consistent and stable than those reported for typical surgical robots. Simulation studies reveal spatial variations in operational…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2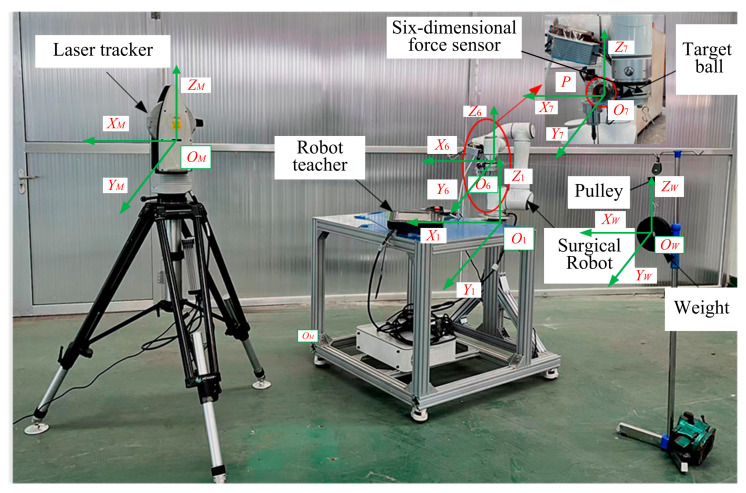 Figure 3
Figure 3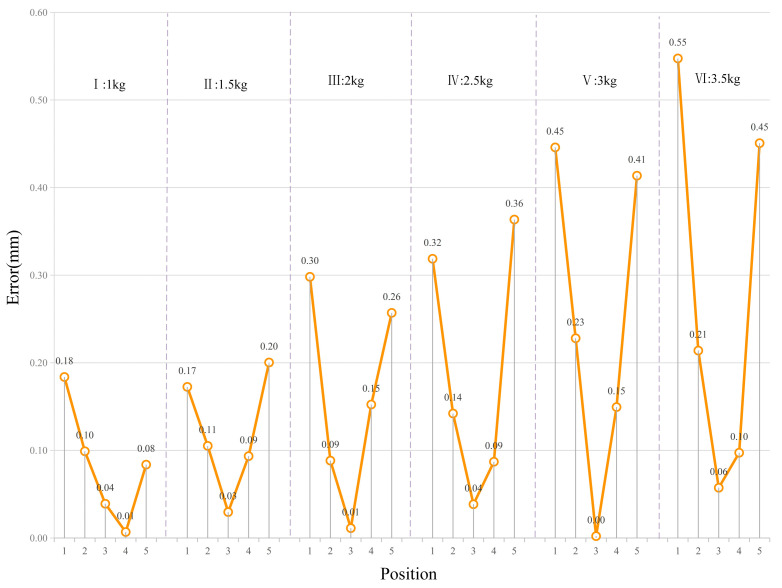 Figure 4
Figure 4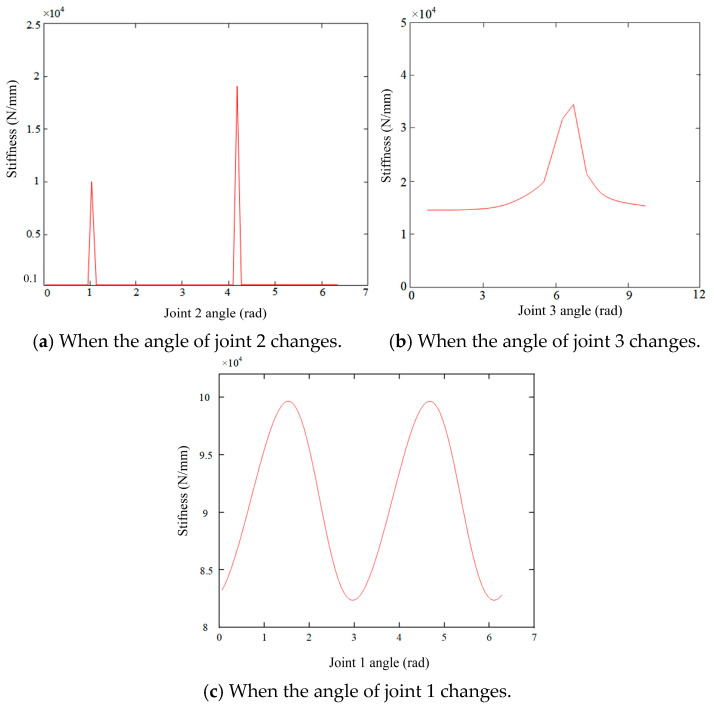 Figure 5
Figure 5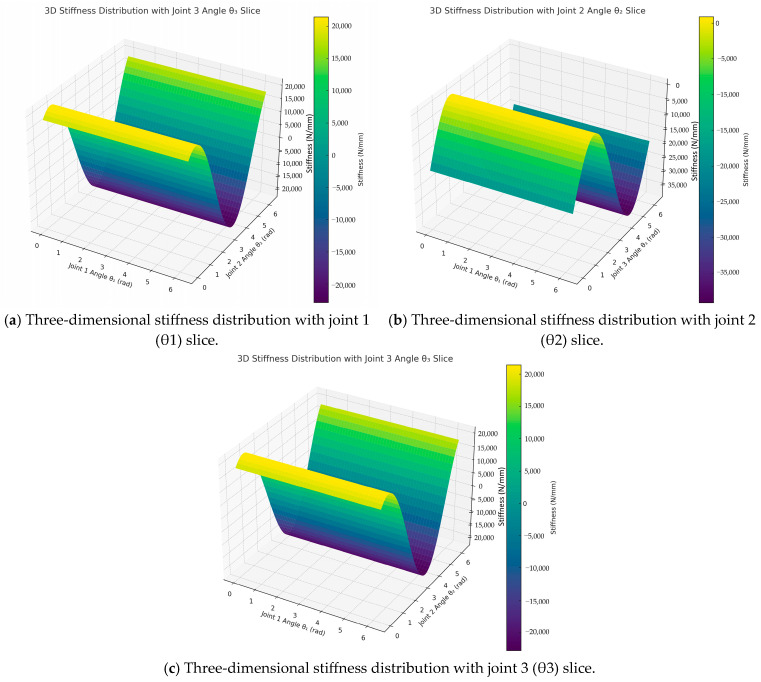 Figure 6
Figure 6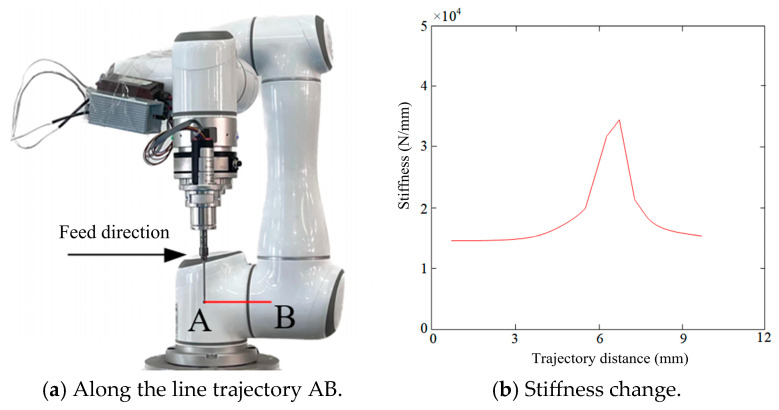 Figure 7
Figure 7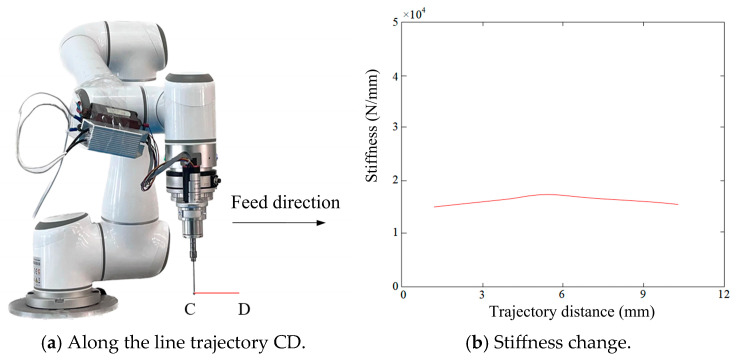 Figure 8
Figure 8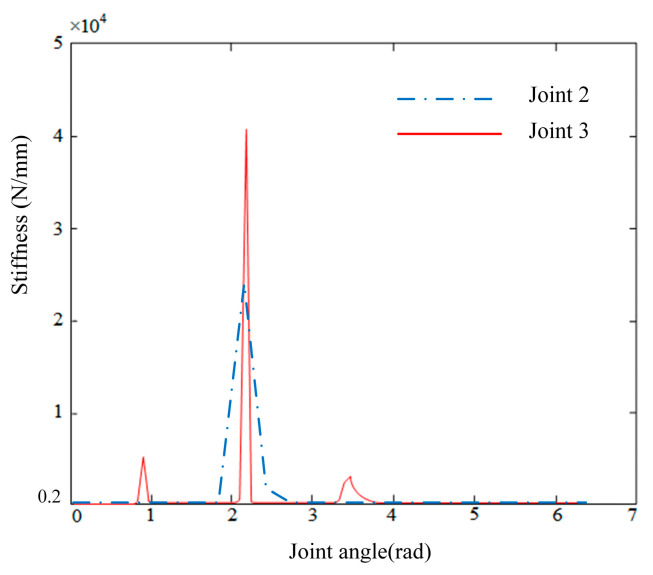 Figure 9
Figure 9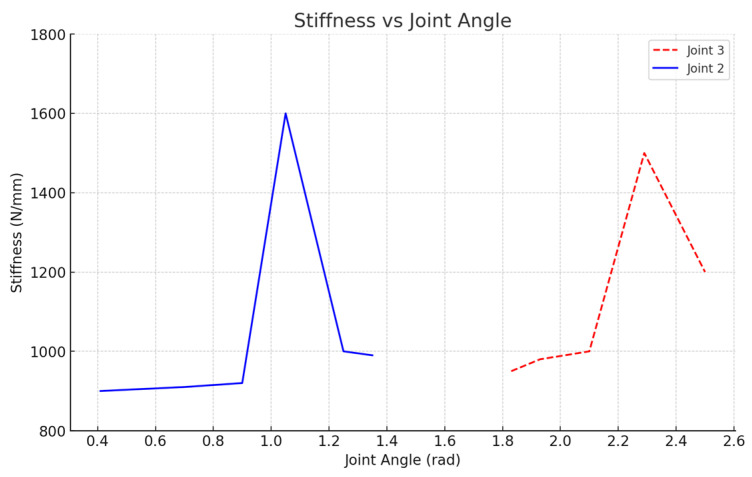 Figure 10
Figure 10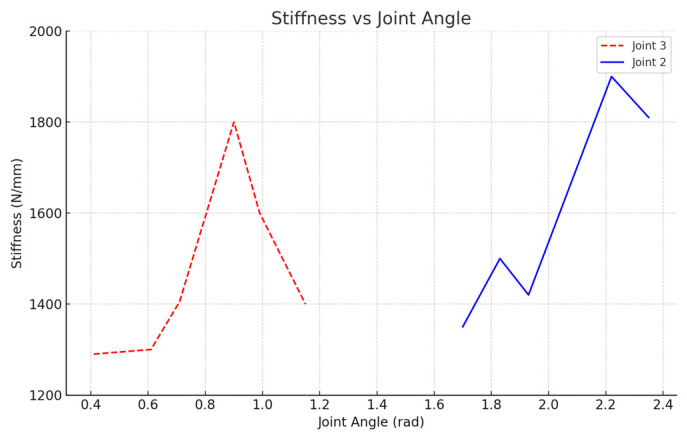 Figure 11
Figure 11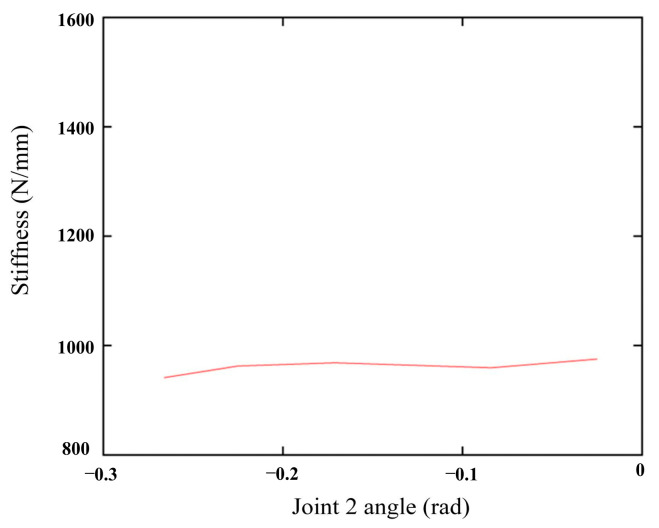 Figure 12
Figure 12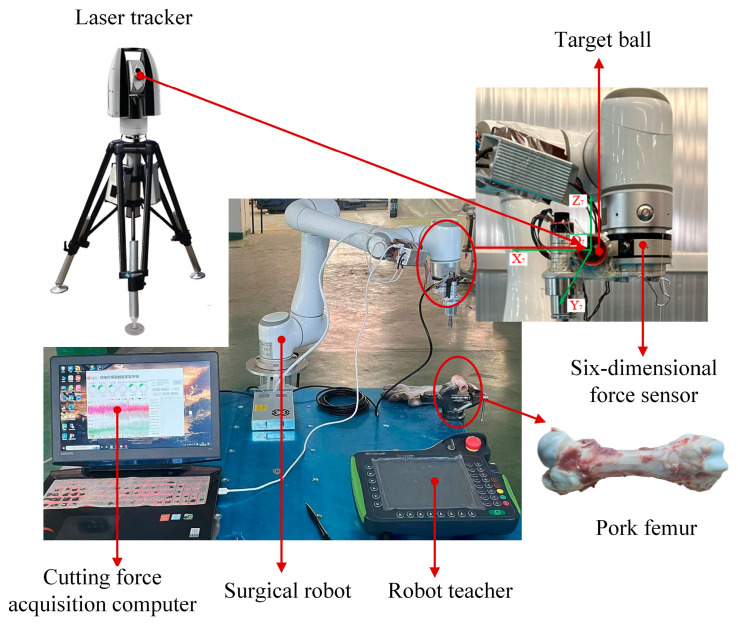 Figure 13
Figure 13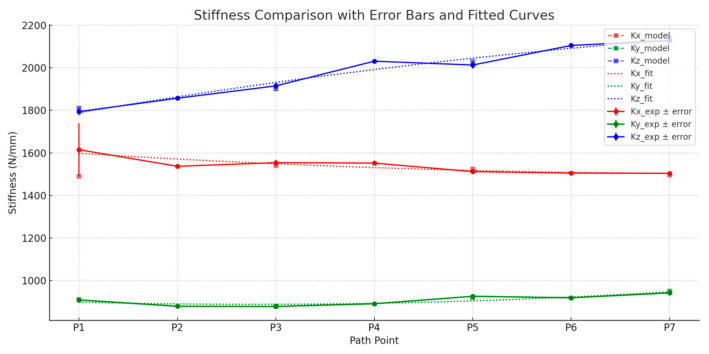 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Mechanisms and Dynamics · Soft Robotics and Applications · Prosthetics and Rehabilitation Robotics