Development of a Cuttlefish-Inspired Amphibious Robot with Wave-Motion Propulsion and Rigid–Flexible Coupling
Yichao Gao, Felix Pancheri, Tim C. Lueth, Yilun Sun

TL;DR
This paper describes a new amphibious robot inspired by cuttlefish movements that can efficiently move on land and in water.
Contribution
The novel rigid–flexible coupling mechanism with wave-motion propulsion for amphibious locomotion is introduced.
Findings
The robot successfully demonstrated efficient movement in both terrestrial and aquatic environments.
Kinematic modeling and simulations validated the wave-like motion and coordination of the propulsion system.
Experimental testing confirmed the feasibility of the bio-inspired design for amphibious robots.
Abstract
Amphibious robots require efficient locomotion strategies to enable smooth transitions between terrestrial and aquatic environments. Drawing inspiration from the undulatory movements of aquatic organisms such as cuttlefish and knifefish, this study introduces a bio-inspired propulsion system that emulates natural wave-based locomotion to improve adaptability and propulsion efficiency. A novel mechanism combining crank–rocker and sliding components is proposed to generate wave-like motions in robotic legs and fins, supporting both land crawling and aquatic paddling. By adopting a rigid–flexible coupling design, the system achieves a balance between structural integrity and motion flexibility. The effectiveness of the mechanism is systematically investigated through kinematic modeling, animation-based simulation, and experimental validation. The developed kinematic model captures the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
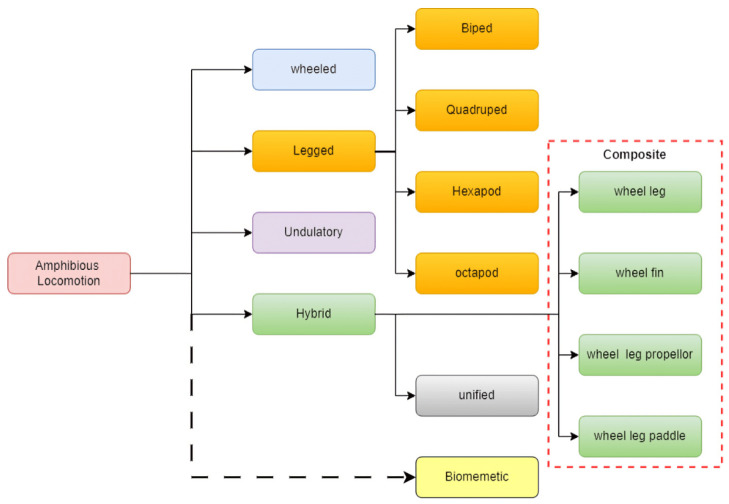 Figure 1
Figure 1 Figure 2
Figure 2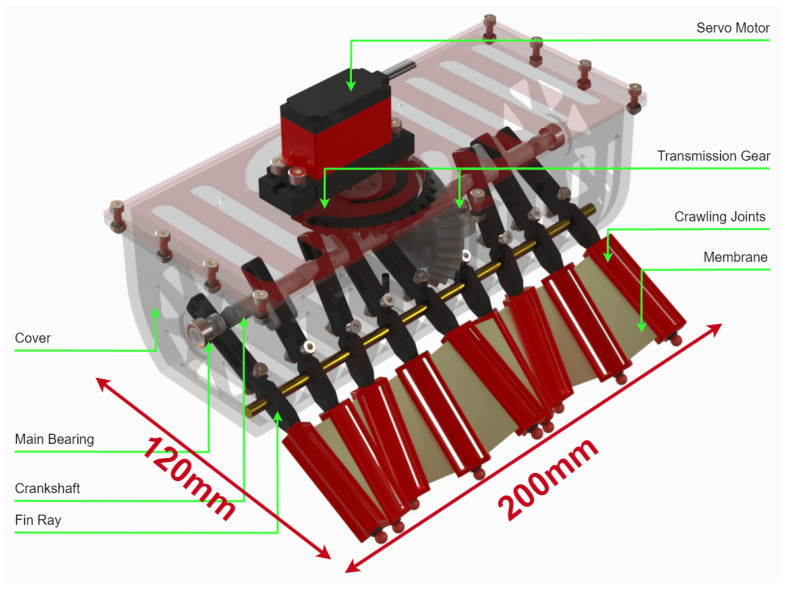 Figure 3
Figure 3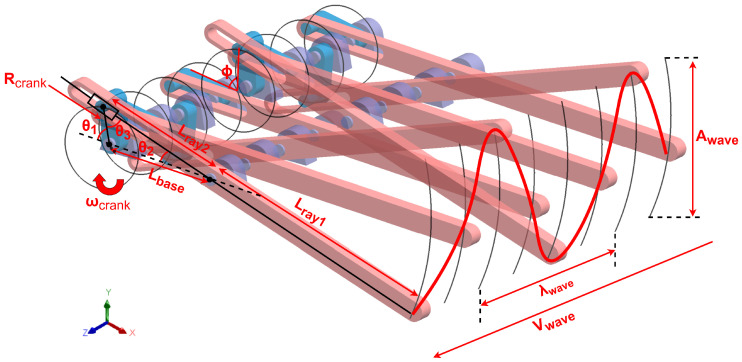 Figure 4
Figure 4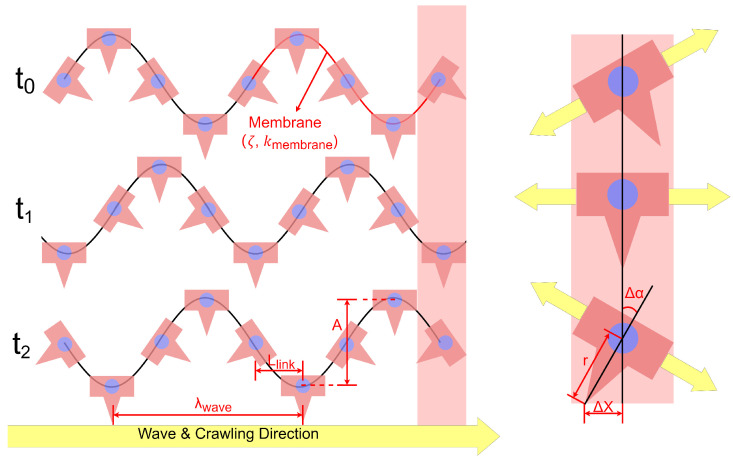 Figure 5
Figure 5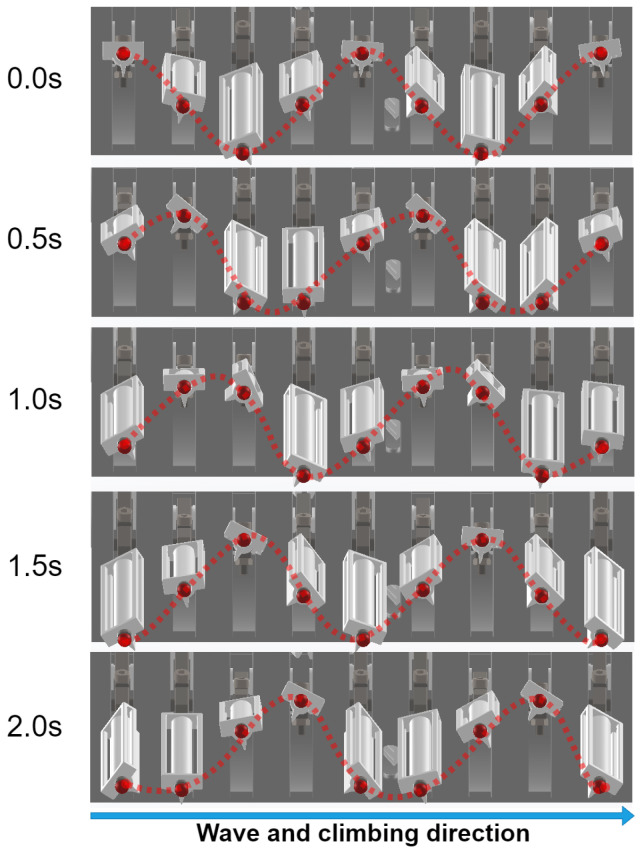 Figure 6
Figure 6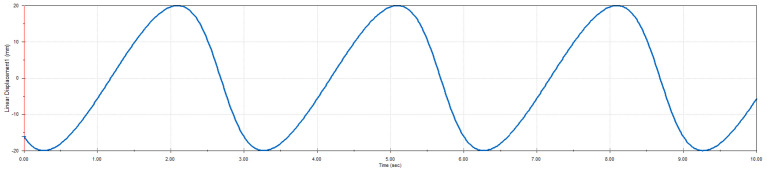 Figure 7
Figure 7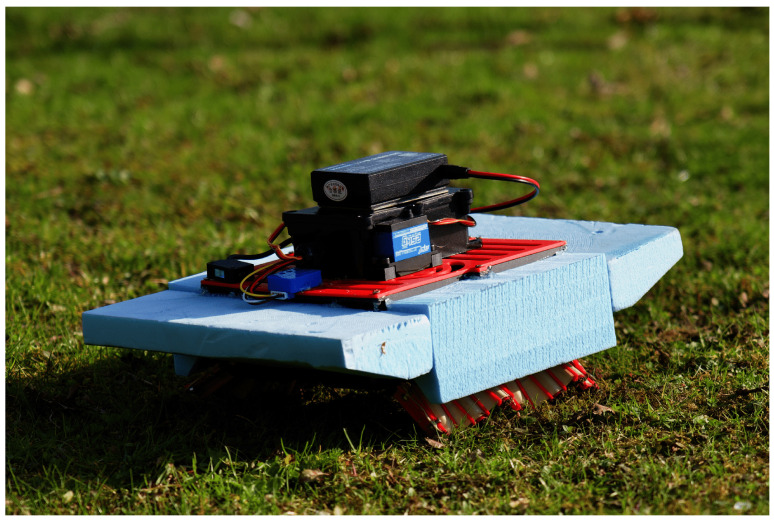 Figure 8
Figure 8 Figure 9
Figure 9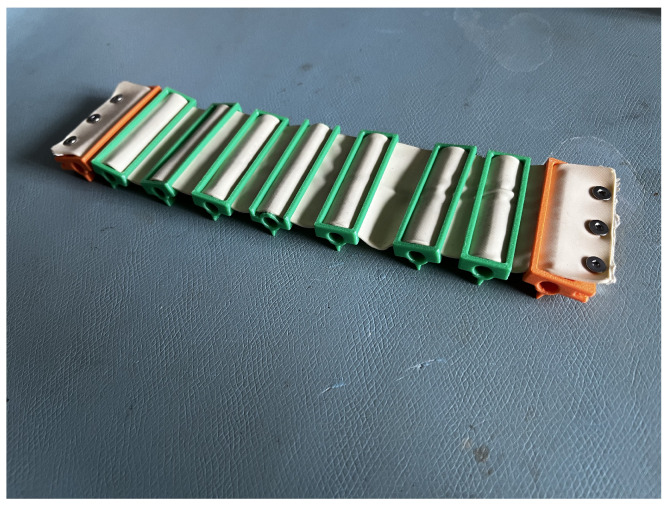 Figure 10
Figure 10 Figure 11
Figure 11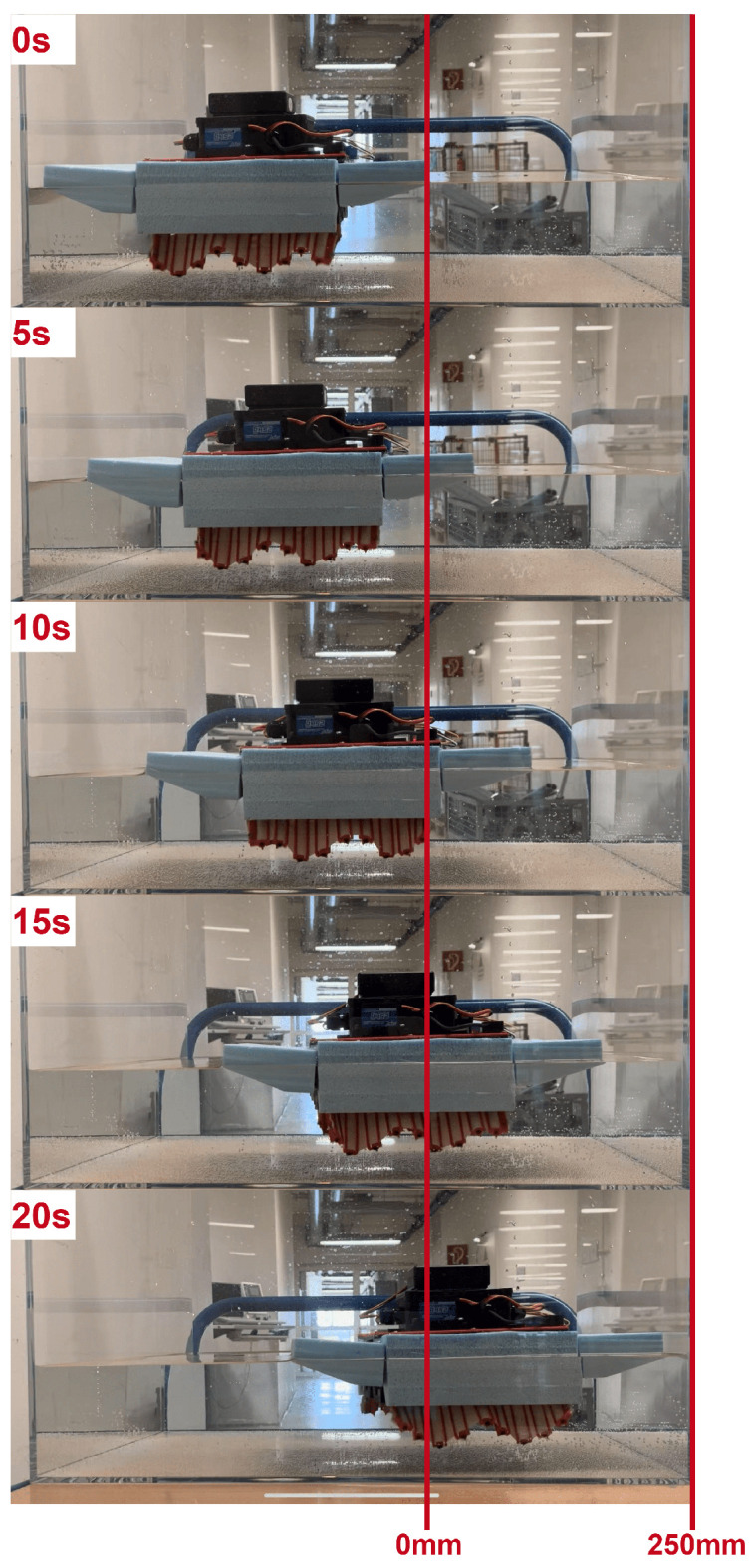 Figure 12
Figure 12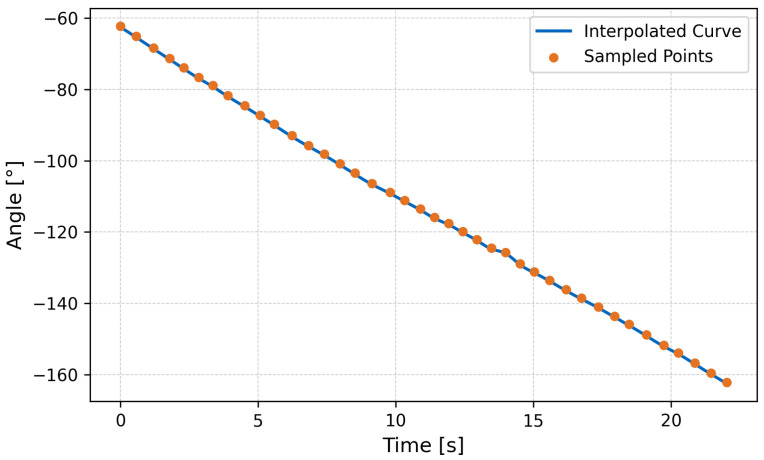 Figure 13
Figure 13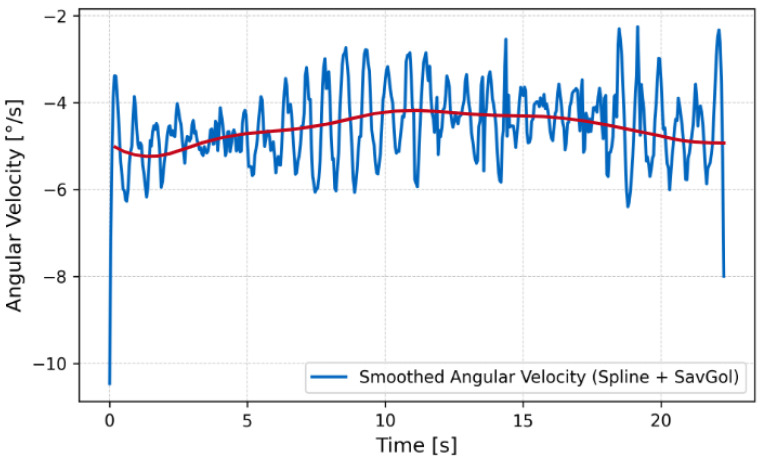 Figure 14
Figure 14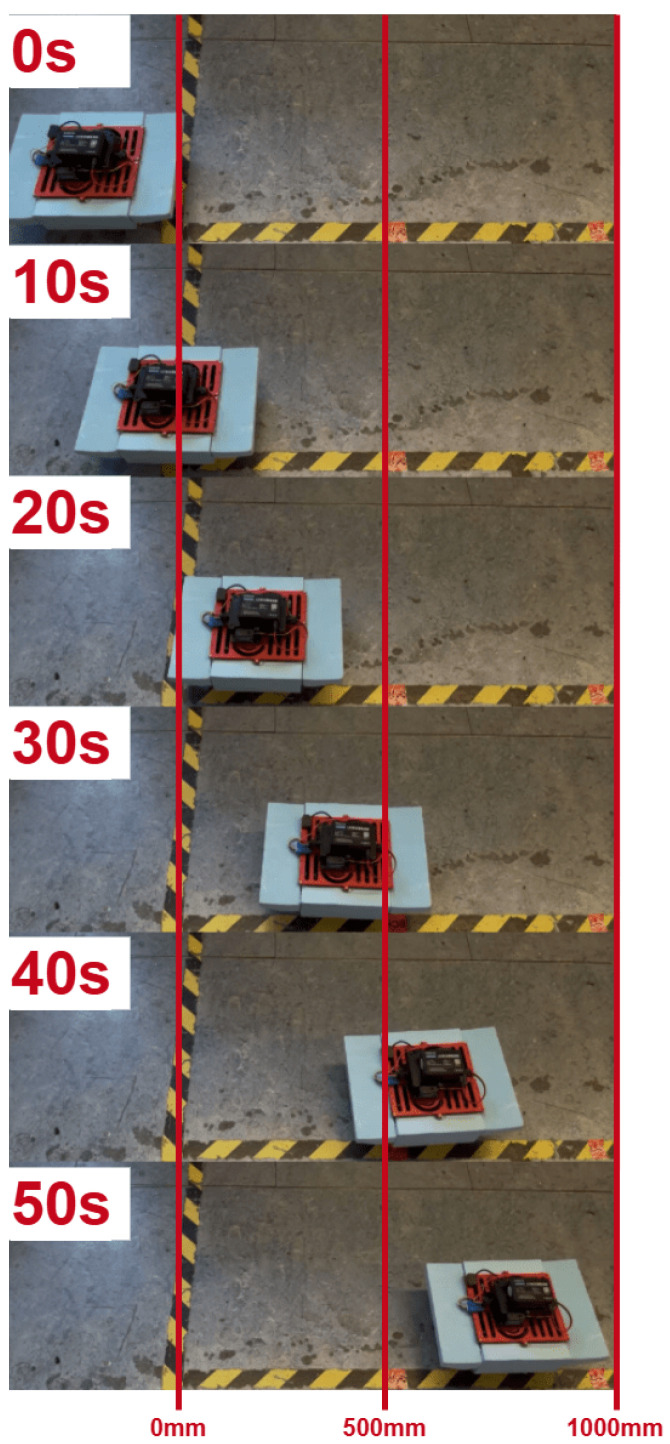 Figure 15
Figure 15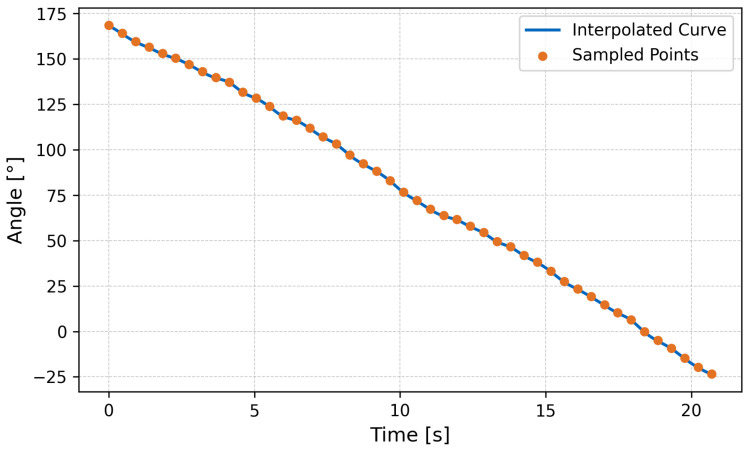 Figure 16
Figure 16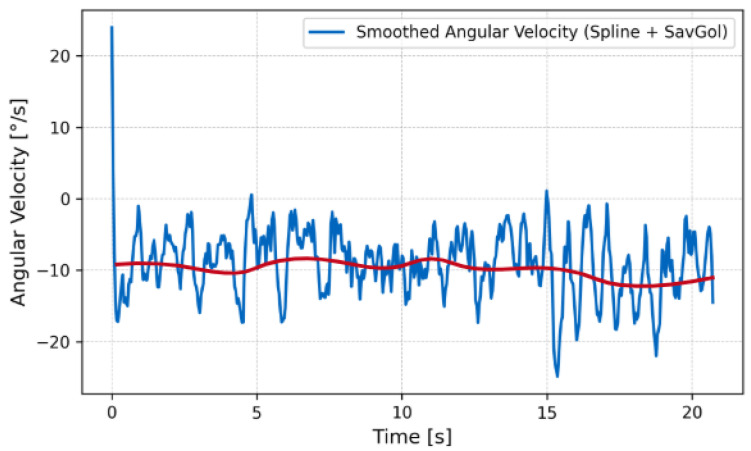 Figure 17
Figure 17Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsBiomimetic flight and propulsion mechanisms · Modular Robots and Swarm Intelligence · Robotic Locomotion and Control