Numerical Analysis of Load Reduction in the Gliding Process Achieved by the Bionic Swan’s Webbed-Foot Structures
Fukui Gao, Xiyan Liu, Xinlin Li, Zhaolin Fan, Houcun Zhou, Wenhua Wu

TL;DR
This study uses computational methods to analyze how swans' webbed feet reduce impact during water landing, offering insights for designing better water-entry systems in vehicles.
Contribution
The study introduces a CFD-based analysis of swan webbed-foot gliding entry, revealing phase-specific dynamics and optimal angles for stability.
Findings
The gliding water-entry process consists of two phases: stable skipping and surface gliding.
An optimal pitch angle of 20° maximizes glide-skip stability, while angles beyond 25° or below 15° cause instability.
Higher water-entry velocity increases impact loads and skipping frequency, while higher angles intensify load magnitude.
Abstract
Webbed-foot gliding water entry is a characteristic water-landing strategy employed by swans and other large waterfowls, demonstrating exceptional low-impact loading and remarkable motion stability. These distinctive biomechanical features offer significant potential for informing the design of cross-medium vehicles’ (CMVs’) water-entry systems. To analyze the hydrodynamic mechanisms and flow characteristics during swan webbed-foot gliding entry, the three-dimensional bionic webbed-foot water-entry process was investigated through a computational fluid dynamics (CFD) method coupled with global motion mesh (GMM) technology, with a particular emphasis on elucidating the regulatory effects of entry parameters on dynamic performance. The results demonstrated that the gliding water-entry process can be divided into two distinct phases: stable skipping and surface gliding. During the stable…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
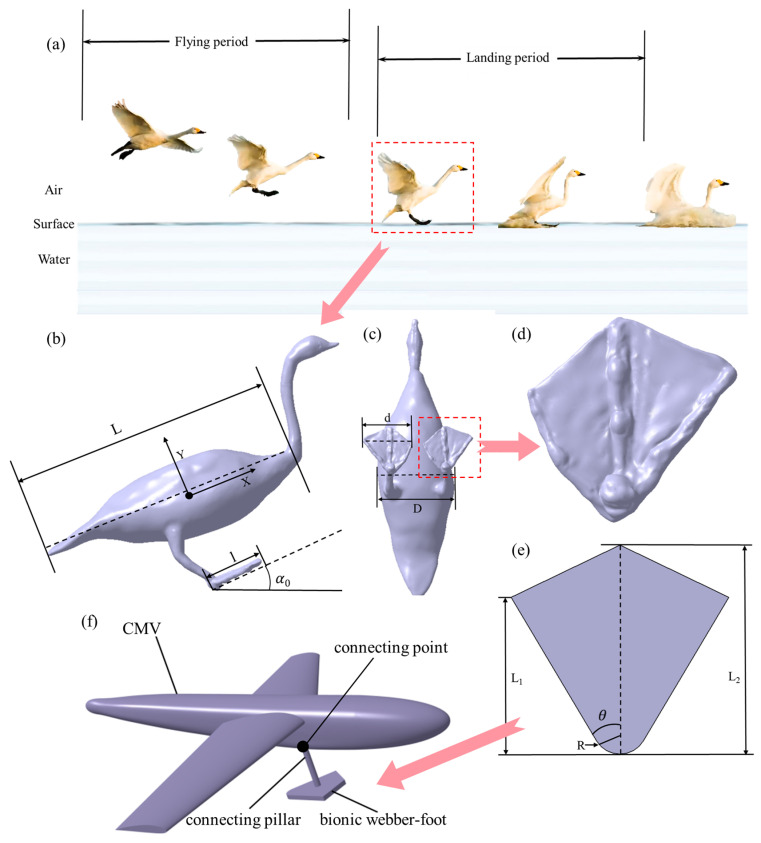 Figure 1
Figure 1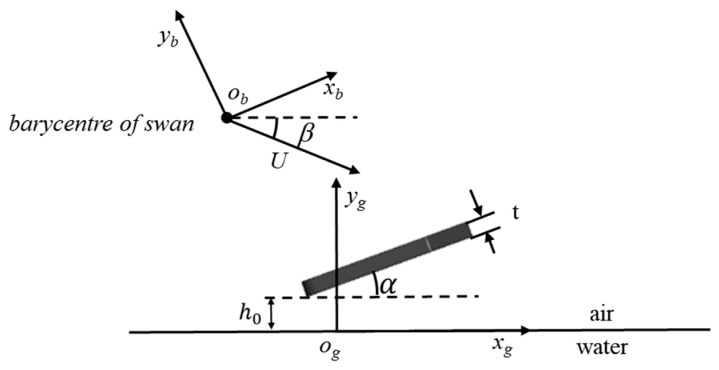 Figure 2
Figure 2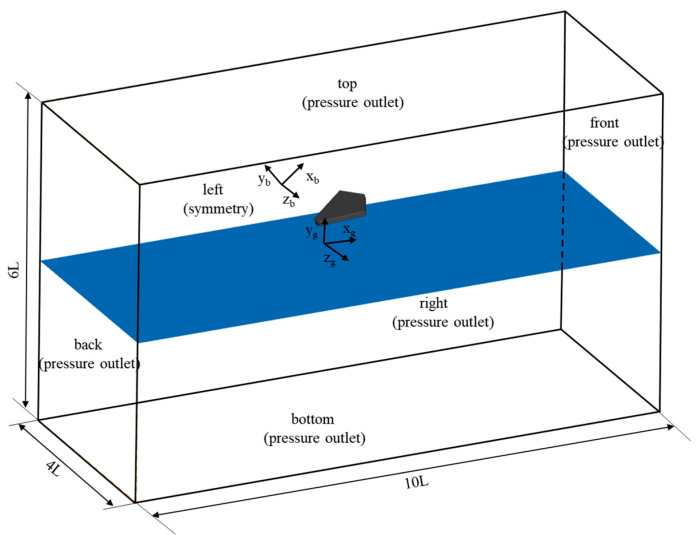 Figure 3
Figure 3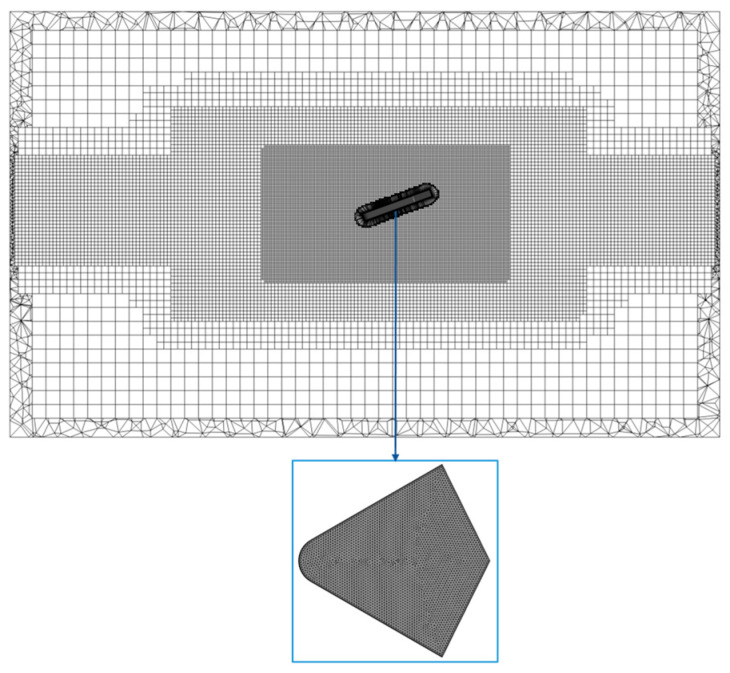 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6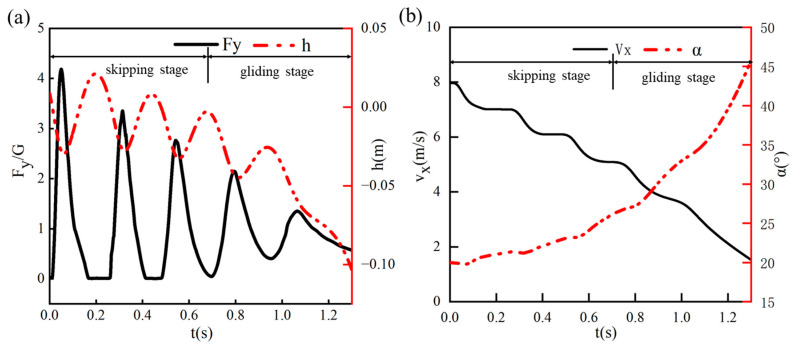 Figure 7
Figure 7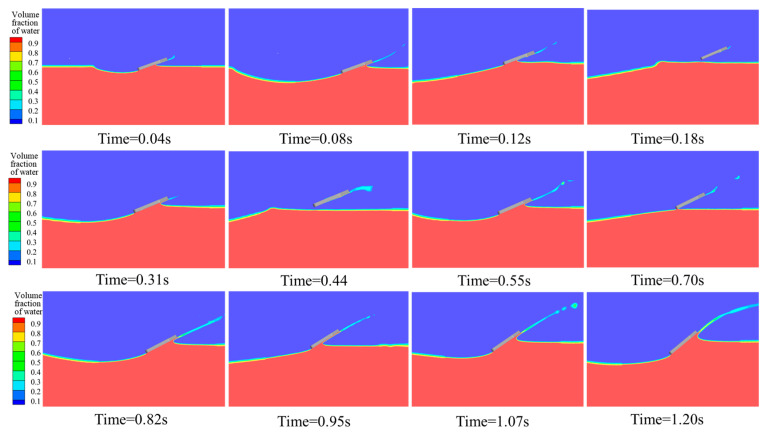 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12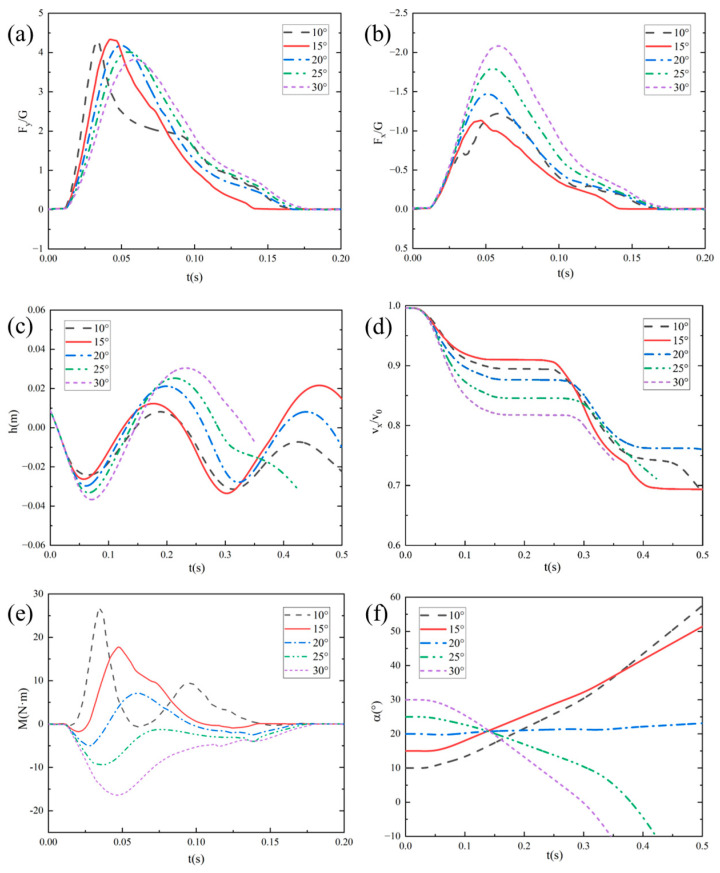 Figure 13
Figure 13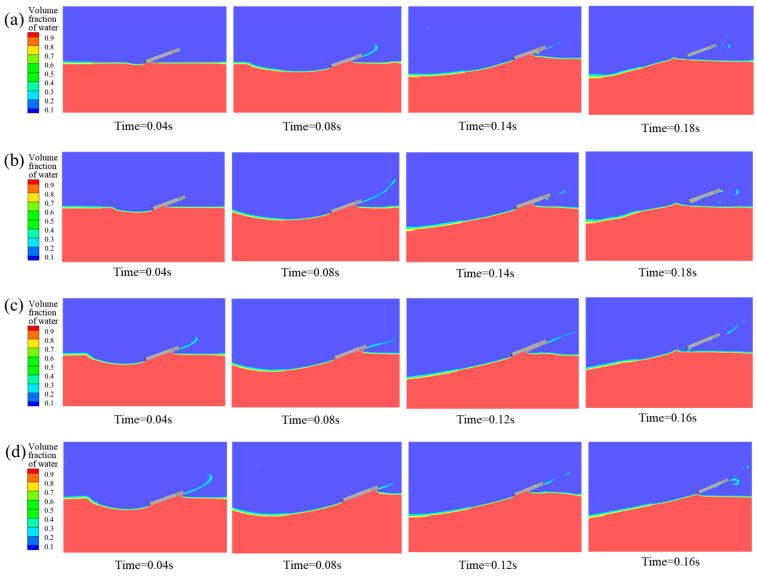 Figure 14
Figure 14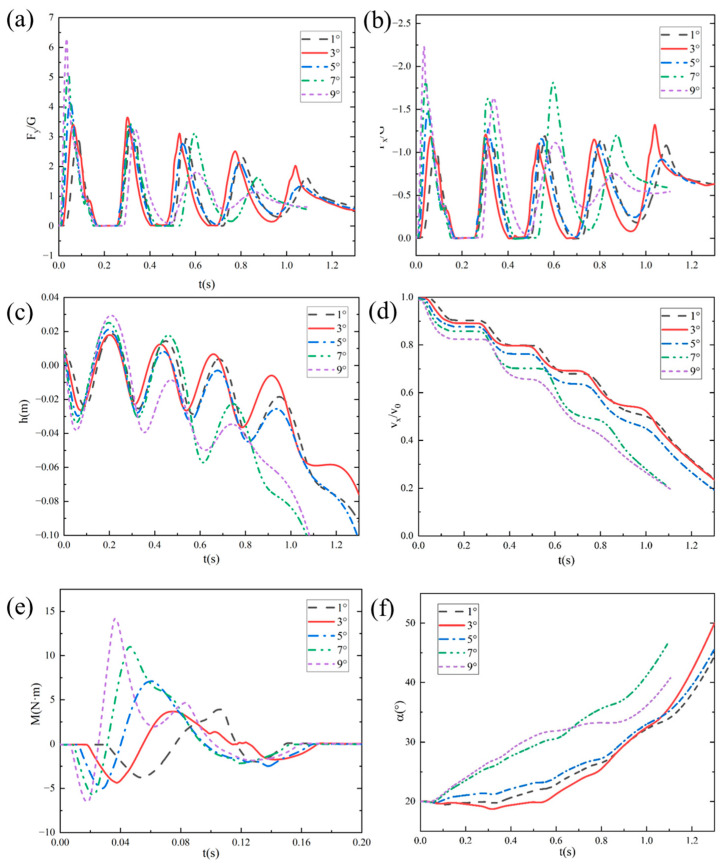 Figure 15
Figure 15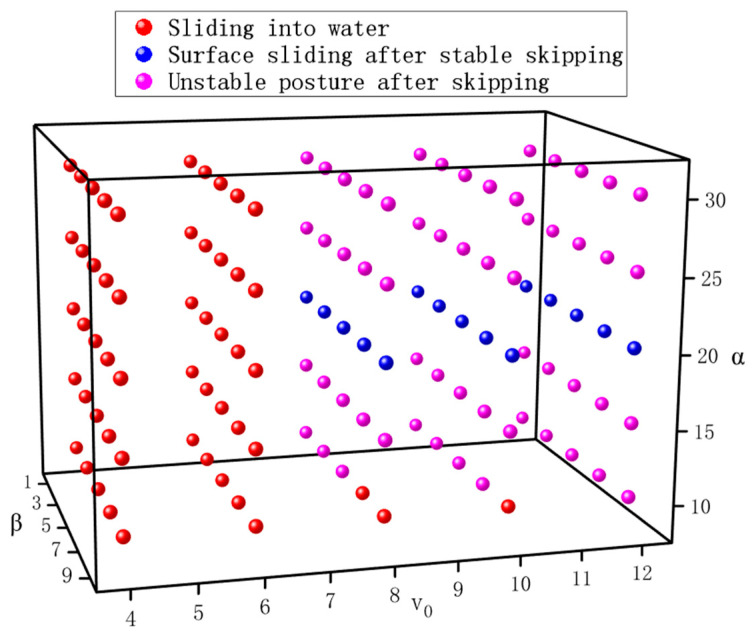 Figure 16
Figure 16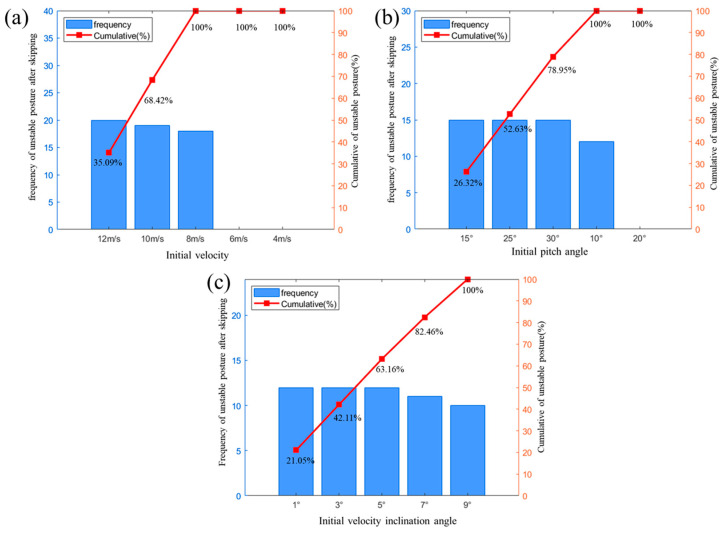 Figure 17
Figure 17Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAerospace Engineering and Energy Systems · Soft Robotics and Applications · Adhesion, Friction, and Surface Interactions