Tire Deformation-Based Regulation of Braking Torque in Manual Wheelchairs Equipped with Reverse Locking Modules
Bartosz Wieczorek, Łukasz Warguła, Marcin Giedrowicz

TL;DR
This paper introduces a new method to regulate braking torque in wheelchairs using tire deformation instead of contact force, improving stability and reducing user strain.
Contribution
A novel regulation method for braking torque based on tire deformation measurements is proposed and validated experimentally.
Findings
Braking torque can be regulated using tire deformation with an error range of 3% to 7%.
Roller diameter and nominal contact force significantly impact braking torque.
User mass affects sliding force, increasing by 57% from 50 kg to 90 kg.
Abstract
Moving in a manual wheelchair involves overcoming various architectural and terrain barriers. One of the obstacles that most burdens the muscular system and generates a high risk of instability is the climb up a slope. This article presents a comprehensive regulation method that allows for achieving the desired braking torque of the locking module based solely on tire deformation measurements, rather than the previously used contact force. To address the research problem, a research method was developed, consisting of three experimental tests and one mathematical analysis. The experiments included the measurement of the sliding force moment (E1), braking torque (E2), and tire deformation (E3). Using these methods, a measurement procedure was formulated to allow the measurement of the braking torque generated by the reverse locking module through tire deformation. Research on braking…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14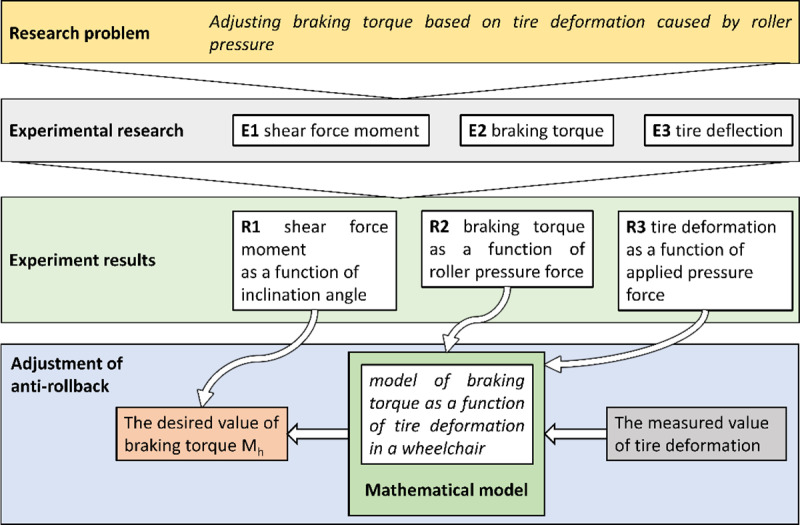 Figure 15
Figure 15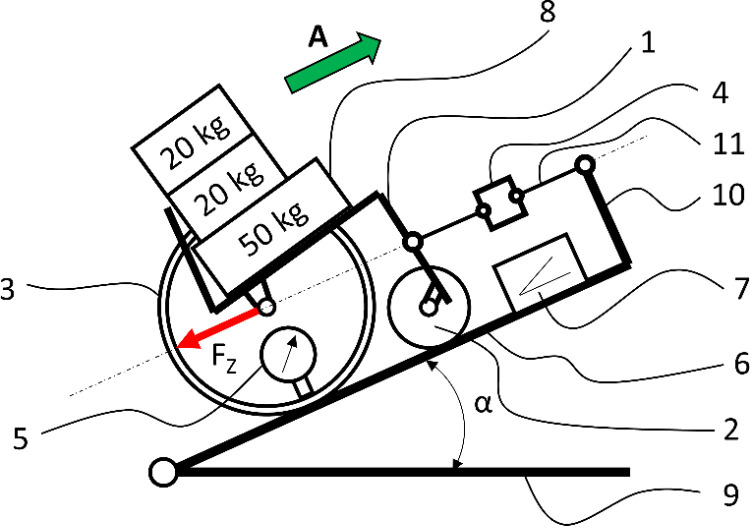 Figure 16
Figure 16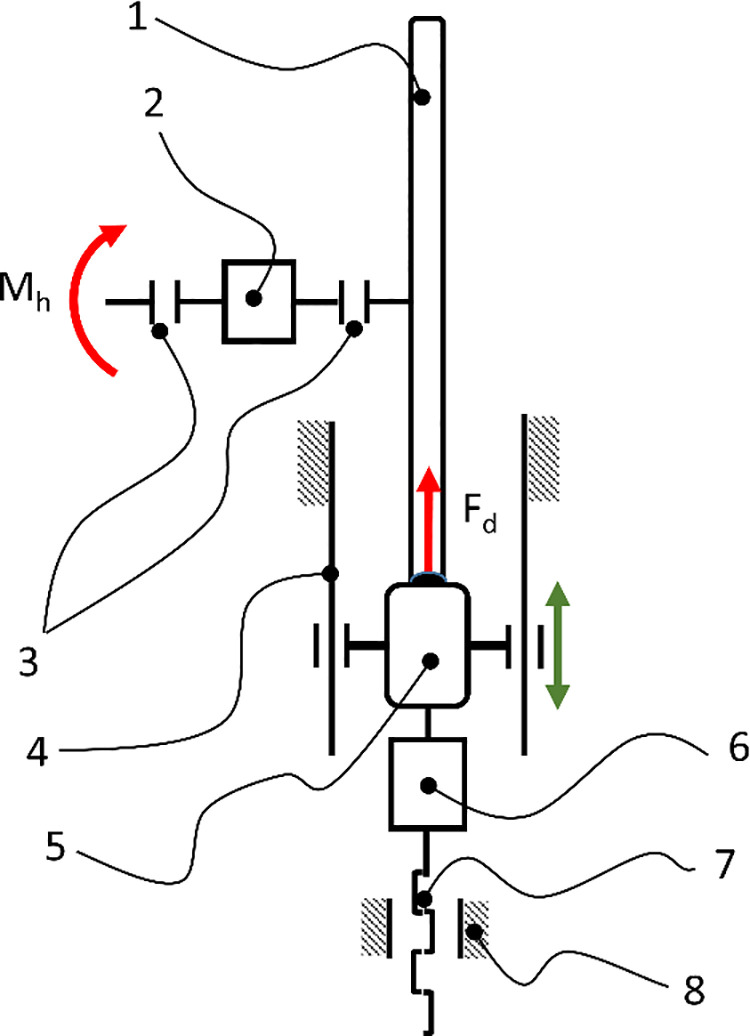 Figure 17
Figure 17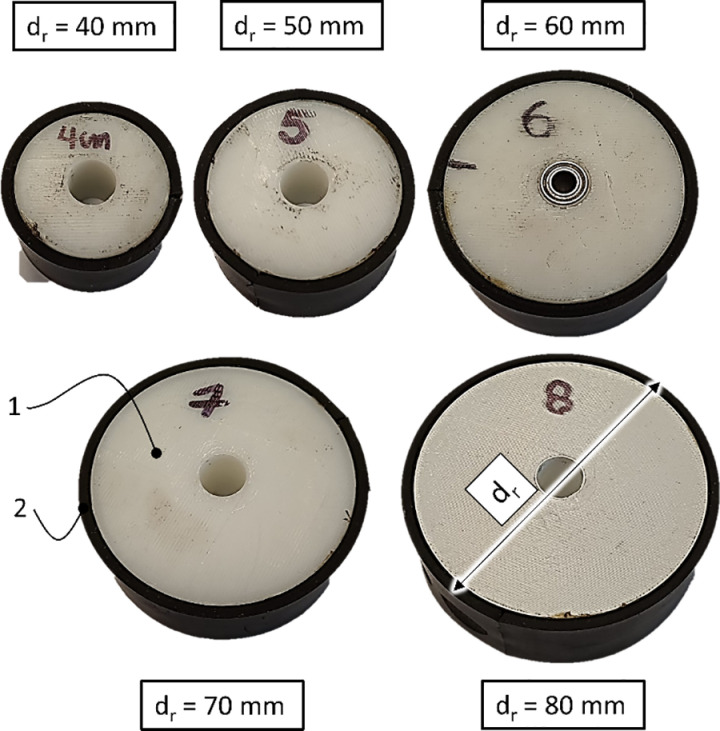 Figure 18
Figure 18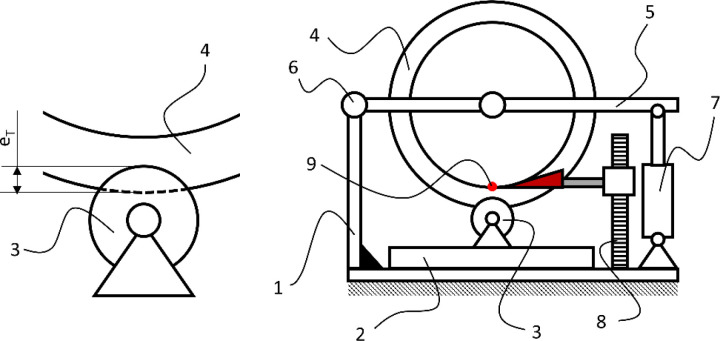 Figure 19
Figure 19 Figure 20
Figure 20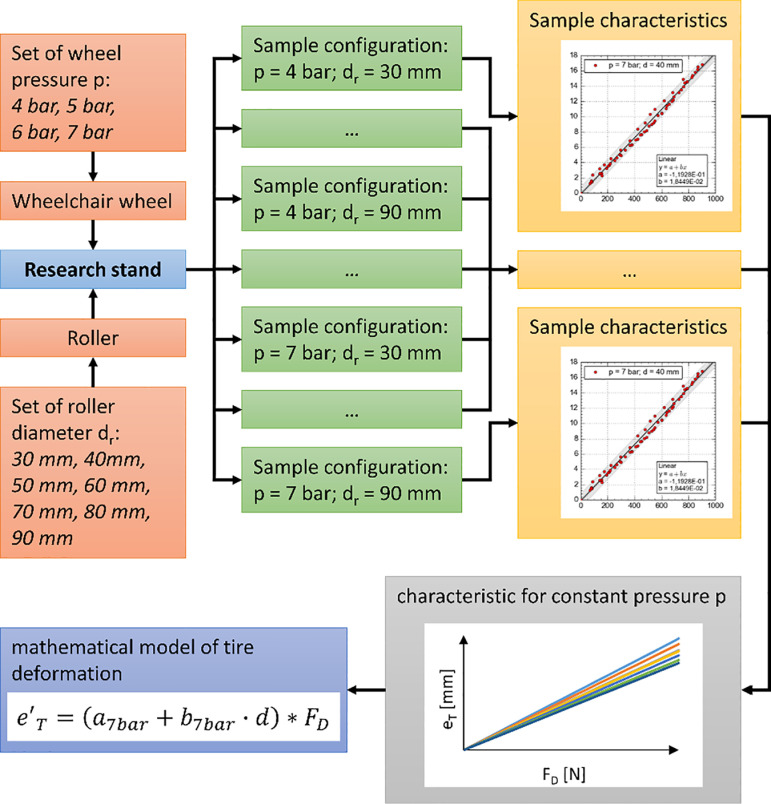 Figure 21
Figure 21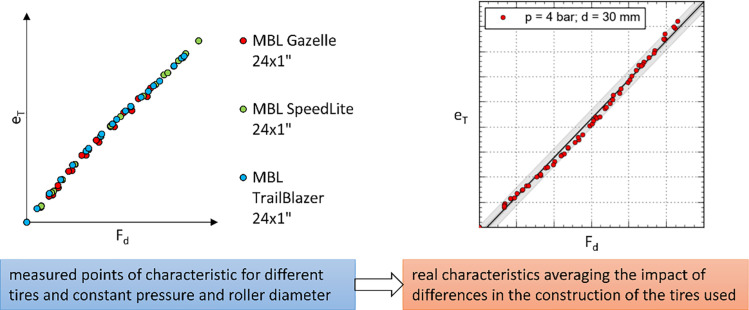 Figure 22
Figure 22 Figure 23
Figure 23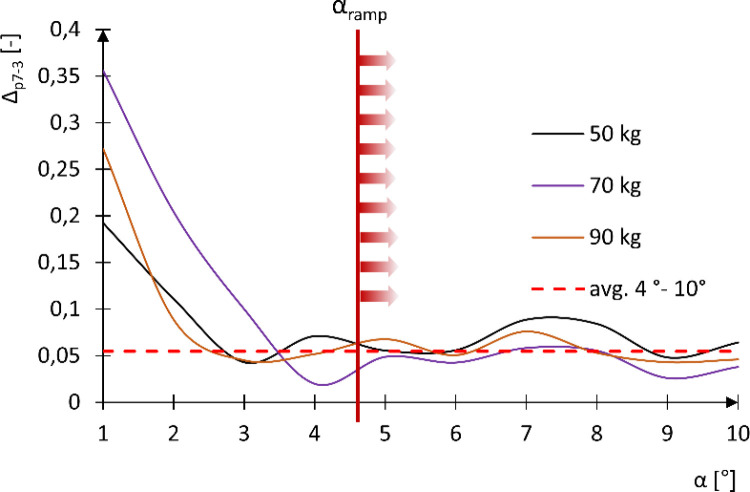 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26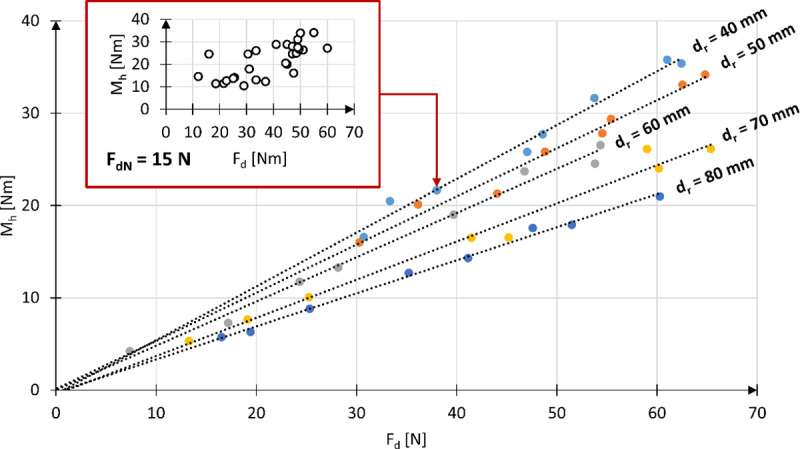 Figure 27
Figure 27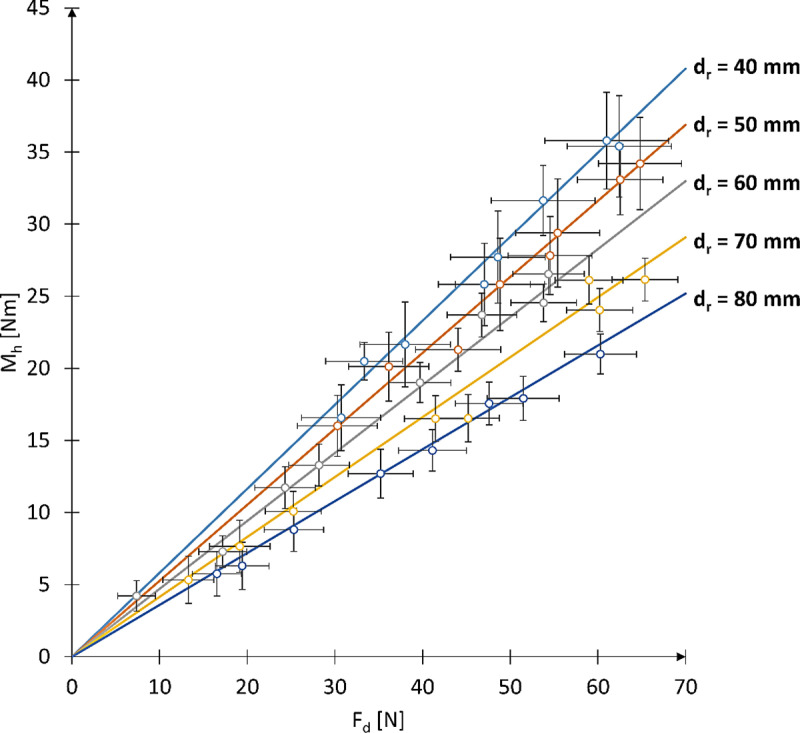 Figure 28
Figure 28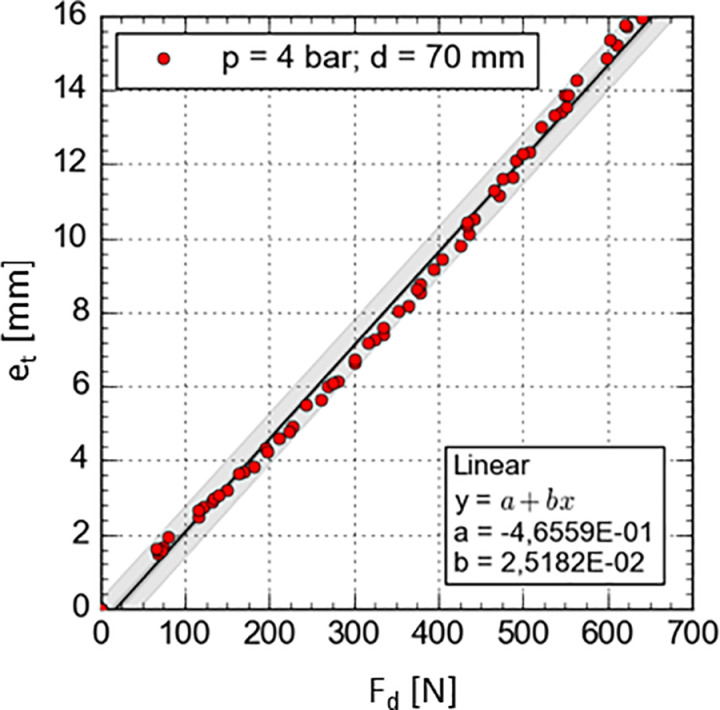 Figure 29
Figure 29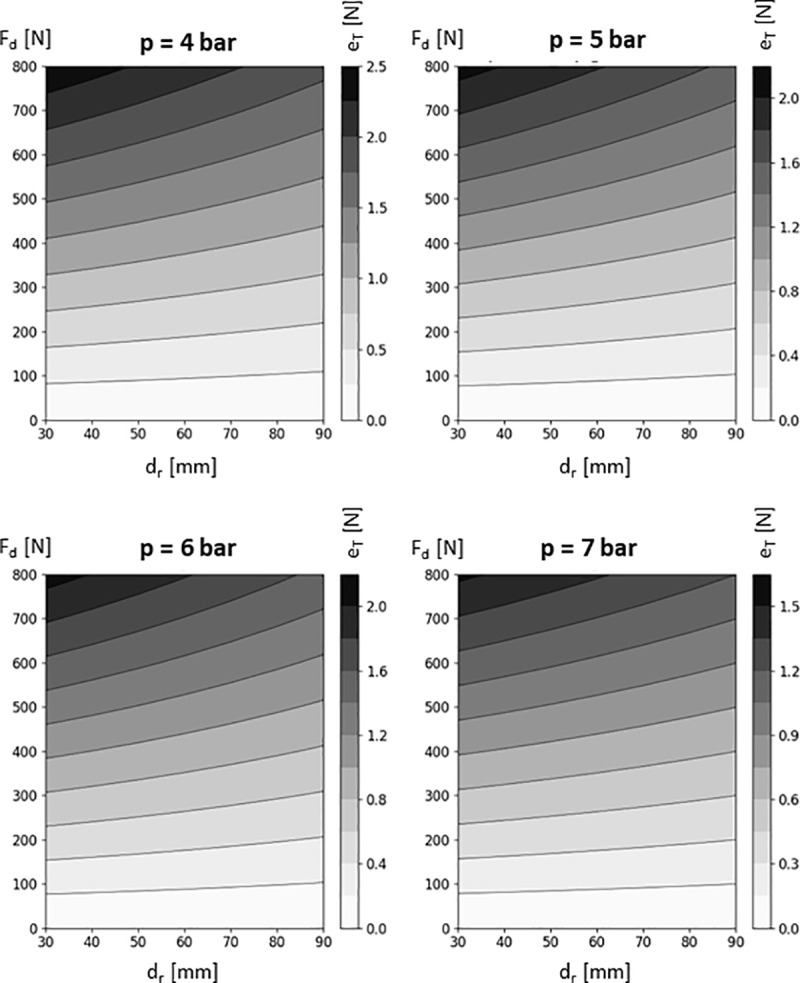 Figure 30
Figure 30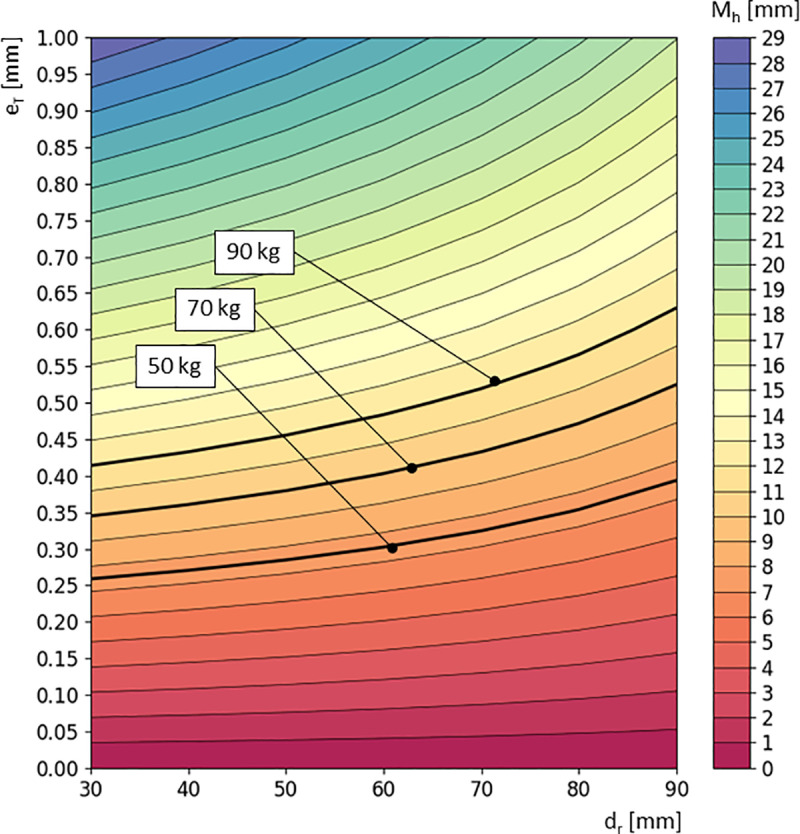 Figure 31
Figure 31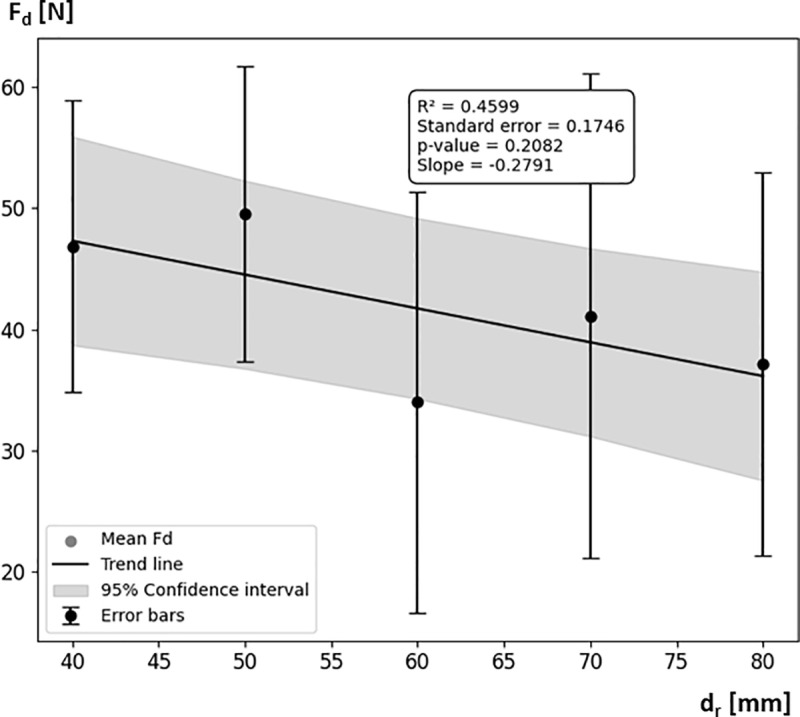 Figure 32
Figure 32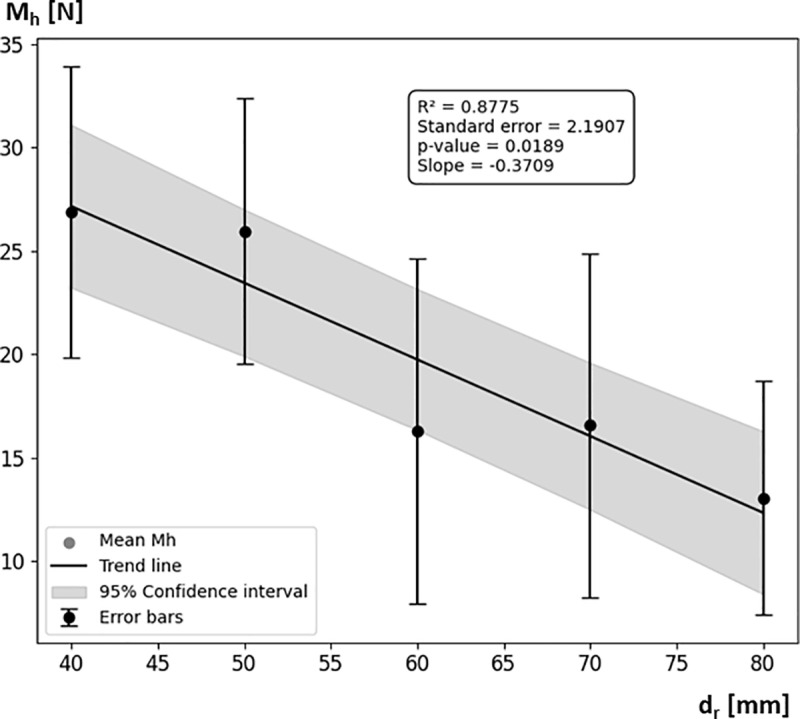 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35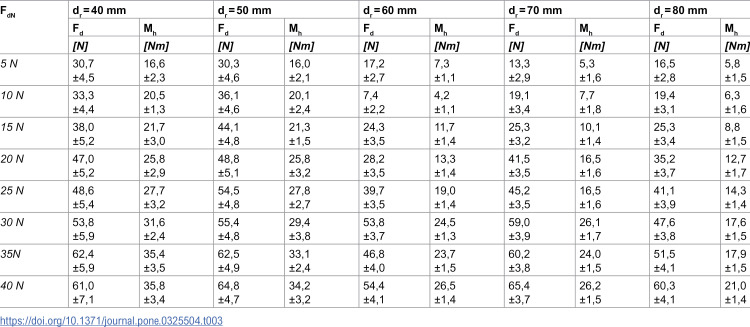 Figure 36
Figure 36 Figure 37
Figure 37 Figure 38
Figure 38 Figure 39
Figure 39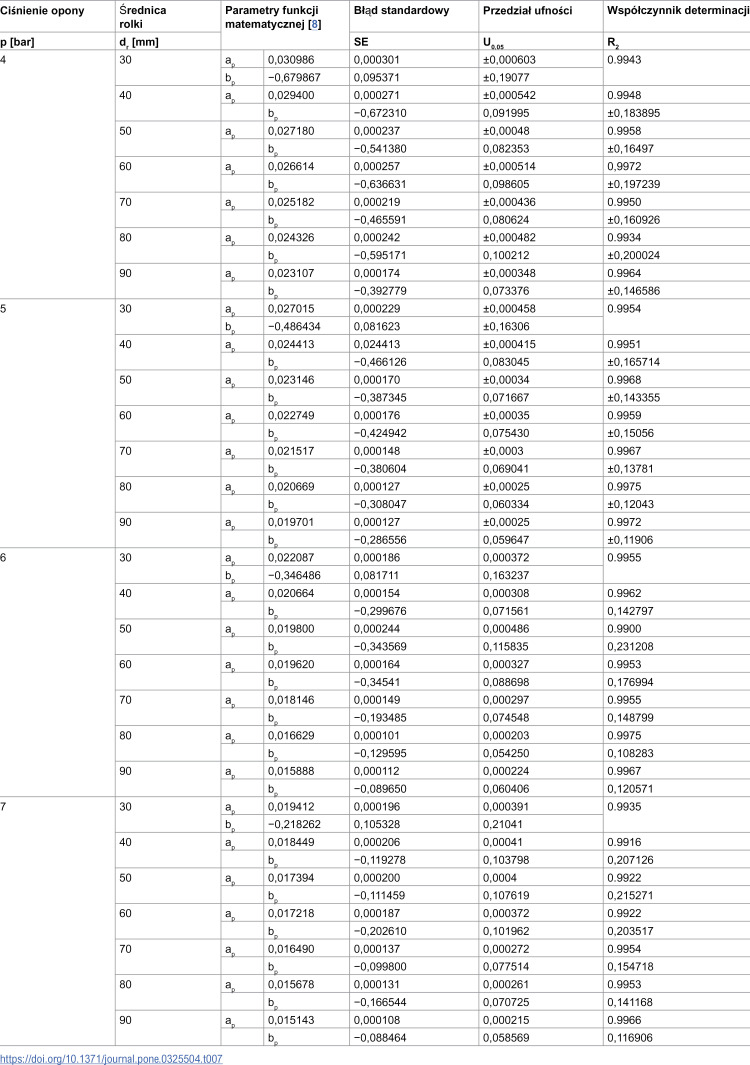 Figure 40
Figure 40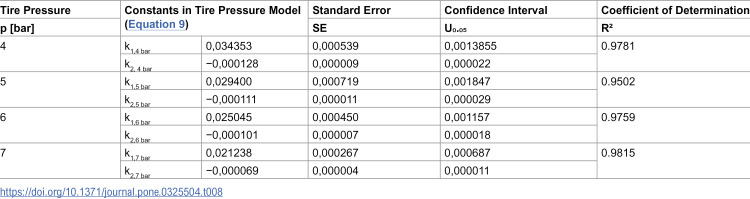 Figure 41
Figure 41 Figure 42
Figure 42Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSpinal Cord Injury Research · Cerebral Palsy and Movement Disorders · Prosthetics and Rehabilitation Robotics